


実用化に向けた取り組みが世界各地で進展する自動運転技術。21世紀前半をけん引する新産業として2010年以降開発競争が激化しており、自動運転タクシーも2018年に入って実用化されたが、その開発の歴史は思いのほか古い。
この記事では、2023年2月までの最新情報をもとに、自動運転開発の黎明期から現代につながる開発の変遷とともに、その歴史を紐解いていく。
なお、自動運転の歴史に詳しい工学博士の津川定之氏の論文を随所で参照した。津川氏は1970年代、工業技術院機械技術研究所(現産業技術総合研究所)所属時に国内初とされる自動運転システムの開発に携わった業界の第一人者と言える人物だ。
▼自動運転システムの60年|津川定之
https://www.jstage.jst.go.jp/article/sicejl/54/11/54_797/_pdf/-char/ja
▼自動運転今昔物語|津川定之
https://www.jsae.or.jp/~dat1/mr/motor15/mr200235.pdf
記事の目次
■1940年代
1939~40年:世界博覧会でGMが近未来の自動運転構想を披露
自動運転にいち早く注目した自動車メーカーは、米GMのようだ。1939~40年に開催されたニューヨーク万国博覧会で自社パビリオン「Highways and Horizons」を設置し、この中で、20年後、1960年の未来像を具現化した巨大ジオラマ「Futurama(フューチュラマ)」を展示した。「Future」と「Panorama」を合わせた造語だ。
ジオラマは円形で、高層ビル街や住宅街などの各エリアを高速道路網がつなぐイメージで形成されており、観客はその周囲を回る動く椅子に座りながら解説を受けるアトラクションとなっていた。
この展示における高速道路が自動運転を可能とする「オートメイテッド・ハイウェイ」となっていた。走行する自動車を電波で誘導し、目的地にいざなうといった内容のようだ。詳細な仕組みは不明だが、現在のITS(高度道路交通システム)のような仕組みを当時構想していたものと思われる。
具体的な研究開発には至らなかったようだが、GMは1964~65年に開催された同博覧会でも内容を一新した「Futurama2」を製作・展示し、人気を博したようだ。
■1950年代
1958年:GMが誘導ケーブル式の自動運転技術を披露
自動運転開発が具体化していくのは、1950年代後半に入ってからのようだ。交通事故や渋滞といった交通課題が顕在化し、米ラジオ会社RCAの提案のもとGMが共同開発に乗り出した。
GMは1958年、同社テックセンターで自動運転車の初デモンストレーションを実施し、未来の高速道路に向けたビルトイン誘導システムの可能性を紹介した。高速道路に誘導ケーブルを敷設して電流を流し、車両前部に装着した誘導コイルで磁界を検出して制御を行う手法で、現在の磁気マーカーシステムの原型のようなイメージだ。
ケーブル敷設のコストが膨大となるため広く普及することはなかったが、バス停における正着制御や閉鎖空間における制御技術として一部で導入された。
■1960年代
1960年ごろ:スタンフォード大学が遠隔制御技術の研究に着手

このころには、大学などにおける研究開発も進み始めたようだ。米スタンフォード大学では1960年ごろ、月面探査向けの遠隔制御技術の研究につながる「スタンフォードカート」の開発が始まる。NASAのプロジェクトに携わっていた大学院生がビデオ情報を使用して遠隔車両を制御する技術の研究を行っており、地球上から車両に搭載されたカメラとラジコンリンクを使用し、月面上を運転する計画だったようだ。
開発当初は、バッテリー式の簡易な4輪車にカメラを搭載し、長いケーブルでテレビディスプレイとステアリングや速度を制御するコントロールコンソールに直接接続していた。磁気テープループによって通信遅延の影響をシミュレートし、通信遅延と速度のさまざまな組み合わせで障害物を回避しながら車両を制御する可能性について研究を進めたようだ。
その後、ジョン・F・ケネディ大統領が月に宇宙飛行士を送る有人ミッションを発表したことで無人化に寄与する同研究は一時下火になったようだが、低電力テレビ送信機と無線制御リンクを構築して視覚ガイダンスプロジェクトを実施するなど、開発は継続された。
1960年代後半に米連邦通信委員会から実験的なTVライセンスを取得し、テレビ画像に基づいてコンピュータを介してカートを制御する技術開発が進められた。時速1.3キロで高コントラストの白線に自動的に追従させる段階まで達したようだ。
この開発は以後も続き、後のDARPAアーバンチャレンジへの参加にもつながっていったとされている。
1960年代:人工知能搭載ロボットの開発も
スタンフォード大学では、スタンフォードカートと並行して人工知能を活用したロボット「Shakey」の研究開発も1960年代に始まっている。
ロボットは、車輪付きのベースにカメラやカメラ制御ユニット、赤外線三角測量距離計、双方向無線通信用のアンテナ、オンボードコンピューターを含む電子機器を搭載し、テレプリントされた指示を介して走行する仕組みだ。
車輪の回転数を数えることで自己位置を追跡したほか、カメラと距離計を使用してランドマークやオブジェクトをスキャンしたという。
1960年ごろ:日本でも自動運転の研究がスタート
津川氏の論文によると、日本でも1960年ごろ、米国の影響を受け通産省工業技術院機械試験所(機械技術研究所を経て現「産業技術総合研究所」)が研究を開始したという。米国同様、走行ルートに誘導ケーブルを敷く手法が中心だったようだ。
▼AIST: 産業技術総合研究所
https://www.aist.go.jp/
■1970年代
1977年:機械技術研究所が世界初のマシンビジョン自動運転車を開発
1970年代には、日本でも自動運転分野における研究開発が花を咲かせた。自動運転システムの研究を進める機械技術研究所が、世界初のマシンビジョンを活用した自動運転システム「Intelligent Vehicle(知能自動車)」を1977年に開発した。
車両前端にステレオカメラを上下に配置し、その視差に基づいて2次元の視野において障害物の検出や距離を測定する手法で、画像処理はカメラからのビデオ信号をハードワイヤドロジックで行ったという。当時は8ビットのマイクロプロセッサ出始めたころで車上におけるコンピュータ処理は事実上難しく、ビデオ信号を二値化してICによる論理回路で直接処理したという。
■1980年代
1980年代前半:米国でAI自動運転車の開発進展
米国では、偵察などの軍事目的で「ALV(Autonomous Land Vehicle)」の開発が進められたようだ。画像処理とレンジファインダで周囲の環境を認識し、AIによって判断やプランニングを行うことで自動運転を実現する仕組みだ。
この研究はその後、カーネギーメロン大学や米国立標準技術研究所などに引き継がれ、乗用車や火星探索車などの研究に応用されていったという。
1984年:機械技術研究所の研究がさらに進展
機械技術研究所による研究は、1970年代の開発初期においてはビジョンシステムで検出したガードレールに沿ってラテラル制御を行うものだったが、1980年代に入ると、差動オドメタに基づくデッドレコニング機能を車両に搭載し、慣性航法に類似した方式でラテラル制御を行ったとしている。その結果、1984年には障害物の検出や回避を行いながら目的地まで時速10キロで自動走行することが可能になったという。
操舵制御アルゴリズムは、デッドレコニングと走路データベースに基づいて開発した。当時の車内には、コンピュータ本体のほかCRTや磁気カートリッジテープ装置、走行軌跡を記録するXYプロッタなどが搭載されていたという。
1980年代後半:交通課題解決に向け自動運転の注目度高まる
1980年代後半に入ると、交通課題解決に向けた国家プロジェクトの中で自動運転への注目度が高まっていったようだ。欧州(EU)では、ダイムラーの提案のもと車両を知能化していくITSプロジェクト「PROMETHEUS」が1986年に始まったという。PSAやルノーなどのも参加し、マシンビジョンやレーダーなどで走行レーンや障害物を検出するシステム開発が進められた。
ダイムラーが開発した「VITA2」には、車両の周囲360度を検出するため18台のカメラが搭載され、時速100キロ超でレーン追従や車線変更などを行うことができたという。
日本では、機械システム振興協会のプロジェクトとして日産と富士通が「PVS」という自動運転の実験システムを開発した。レーンマーキング検出用のカメラや障害物検出用のカメラ、ガードレール検出用の超音波センサーなどとともに、ビデオレートで処理する専用の画像処理装置を搭載し、ベテランドライバーの経験に基づいた知識ベースで制御を行ったという。
■1990年代
1990年代初期:カリフォルニアで高密度車群走行システム開発
1990年代初期には、1986年に立ち上がった米カリフォルニア州のIVHSプロジェクト「PATH」において、プラトゥーニングと呼ばれる自動追従技術などの開発が進められた。磁気マーカーを活用し、狭い車間距離で高密度の車群走行を可能とするシステム開発を目指していたようだ。
1995年:カーネギーメロン大学が自動運転車で大陸横断
米カーネギーメロン大学のロボティクス研究所は1995年、ミニバンを改造した「NavLab 5」と呼ばれる自動運転車両でワシントンD.C.からサンディエゴに至る約4,800キロの行程のうち98%以上を自動運転で走破した。ブレーキなどの縦方向の制御は手動だったものの、横制御において自動運転を実現したという。
なお、この研究には当時同研究所に在籍していた金出武雄氏(現京都大学高等研究院招聘特別教授)が携わっている。同氏は、画像認識技術の第一人者として知られる世界的権威だ。
1996年:上信越高速道路で自動運転デモ
日本では、当時の建設省主導のもと開通を目前に控えた上信越高速道路で磁気マーカーシステムを活用した路車協調型自動運転システムのデモが行われた。
■2000年代
2000年:自動運転車5台の隊列走行デモ実施
機械技術研究所と自動車走行電子技術協会(現日本自動車研究所)は2000年、車車間通信で5台の自動運転車を隊列走行する協調走行システムの実験及び走行デモを行った。
2004年:DARPAグランドチャレンジ開催
米国防高等研究計画局(DARPA)は2004年、自動運転技術を駆使して長距離コース走破を目指す「DARPA Grand Challenge(DARPAグランドチャレンジ)」を実施した。世界初の長距離無人自動運転レースで、15チームが参加した。
10時間以内に砂漠地帯142マイル(約230キロ)を走破した車両が受賞対象とされたが、完走車はなく、11キロ余りを走行したカーネギーメロン大学のチーム「Red Team」が最高成績となったようだ。
なお、参加したマサチューセッツ工科大学のチームには、後にCruise Automationを創業するカイル・ヴォグト氏が在籍していた。
翌2005年開催の「2005グランドチャレンジ」では、決勝に進出した23チーム中5チームが完走した。1位はスタンフォード大学の「Stanford Racing Team」、2位、3位はカーネギーメロン大学の「Red Team」が占めた。
なお、Stanford Racing Teamのリーダーは、後にGoogle XやUdacityを創設するセバスチャン・スラン氏が務めていた。
3度目の開催となった「2007アーバンチャレンジ」は閉鎖された空軍基地に会場を移し、市街地を想定した約100キロのコースを6時間以内に完走する新たな取り組みとなった。
競技の結果、1位はカーネギーメロン大学の「TARTAN RACING」、2位はスタンフォード大学の「Stanford Racing Team」となった。
TARTAN RACINGでは、後にAurora Innovationを創業するクリス・アームソン氏がテクノロジーディレクターを務めたほか、Nuro創業者のデイブ・ファーガソン氏、Argo AI創業者のブライアン・サレスキー氏らが名を連ねている。
【参考】関連記事としては「自動運転、「レース」が技術革新の火種に 日本でも大会が定着」も参照。
2009年:グーグルの自動運転開発プロジェクト始動

DARPAの取り組みを受け、いち早く動き出したのが米グーグルだ。2007年にセバスチアン・スラン氏を迎えて自動運転開発に向けた準備を進め、クリス・アームソン氏ら有数のエンジニアを採用し2009年に「Self Driving Car Project」をスタートした。
今日につながる自動運転技術の本格的な社会実装を見越した民間の取り組みは、このグーグルの活動に端を発するところが大きい。ロビー活動で自動運転車の公道走行を可能にし、多くの人が目にする形で自動運転車の可能性を世の中に示した。
クリス・アームソン氏ら数々のエンジニアを輩出している点も注目すべきポイントで、多くのスタートアップを交えた今日の自動運転開発競争は、DARPA参加エンジニアとグーグルの取り組みによるところが非常に大きいのだ。
Googleの自動運転事業は、のちに自動運転タクシーを世界で初めて商用化するWaymo(ウェイモ)へとつながっていく。
▼Waymo
https://waymo.com/
■2010年代
2010年代:国内外で自動運転スタートアップが続々設立
2010年代に入ると、自動運転技術を開発するスタートアップが続々と立ち上がった。国内では、2014年に先進モビリティ、2015年にティアフォーが設立されたほか、海外では、2013年にCruise Automation、2016年にNuroやArgo AI、Embark Trucks、2017年にAurora InnovationやMay Mobilityなどがそれぞれ創業され、開発競争をけん引している。
こうした背景には、先行するグーグルの影響とともに、ディープラーニングなどAI(人工知能)技術の進化を挙げることができそうだ。
【参考】関連記事としては「自動運転業界のスタートアップ一覧(2022年最新版)」も参照。
2014年:戦略的イノベーション創造プログラム(SIP)が始動
自動運転開発に向け官民総出で取り組む国家プロジェクト「戦略的イノベーション創造プログラム(SIP)」が2014年度にスタートした。
自動運転システムの開発をはじめ、高精度3次元地図やインフラ協調システムの開発など社会実装に必要となるさまざまな項目を網羅した一大事業で、2014年度からの第1期、2018年度からの第2期に事業期間を分け、非常に多くの研究や実証を重ねてきた。
自動運転分野は、実用化面で米国や中国が先行しているイメージが強いが、それはグーグルをはじめとした一部のテクノロジー企業の功績と言える。国家単位で見た場合、法整備などを含めた総合力では日本は間違いなく先行グループに属する。
レベル4時代を見据えた各国の動向は開発企業も注視しており、サービス導入が可能な国・エリアに今後開発企業が集中する可能性も高い。ドイツとともにいち早くレベル4法を成立した日本が今後どのような立ち位置となるか、引き続き注目だ。
【参考】SIPについては「関係者必読!SIP第2期自動運転、全300ページの最終報告書」も参照。
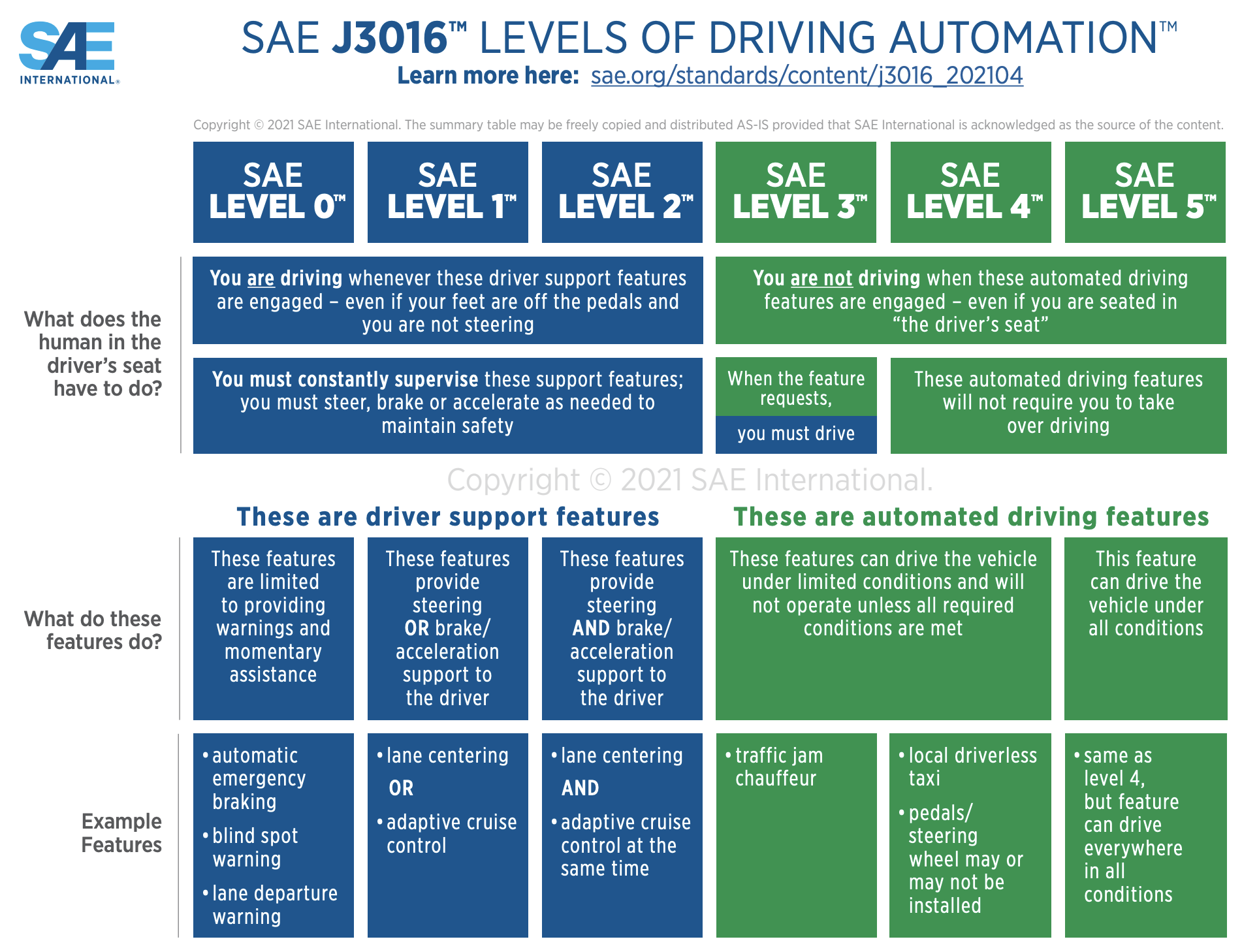
2016年:SAE自動運転レベルが世界スタンダードに
「自動運転レベル」の概念がいつ誕生したかは正確には曖昧だが、現在広く認知されているSAE(米自動車技術会)による6段階の定義は、2016年に策定された。
それまでは、NHTSA(米運輸省道路交通安全局)が2013年に発表した定義やSAEが2014年に策定した定義などが混在していたが、SAEが2016年に現行基準に改定(2022年4月時点の最新版は2021年4月にマイナーチェンジされたバージョン)した際、NHTSAも定義一本化に向けSAEの定義を用いることとした。
このSAEの新基準が世界各国で最も採用されるスタンダードな概念として浸透し、現在に至っている。
▼SAE International Releases Updated Visual Chart for Its “Levels of Driving Automation” Standard for Self-Driving Vehicles
https://www.sae.org/news/press-room/2018/12/sae-international-releases-updated-visual-chart-for-its-%E2%80%9Clevels-of-driving-automation%E2%80%9D-standard-for-self-driving-vehicles
【参考】自動運転レベルについては「自動運転レベルとは?定義や呼称、市販車の車種は?できることは?」も参照。
2016年:スイスで自動運転シャトルバスの本格実証スタート
自動運転バスを活用した公共交通サービスが2016年、スイスで開始された。諸説ありそうだが、公共交通における自動運転バスの継続的なサービスとしては世界初とみられる。
車両は、仏NAVYAの自動運転シャトルバス「ARMA」を使用し、許可された車両のみ通行可能な道路を利用した長期実証としてスタートした。乗客から料金を徴収する営業運行の形で走行しているようだ。
2016年:公道を走行する宅配ロボットが登場
現在世界各国で開発と実用化が進められている自動走行ロボット。屋外において公道を走行して商品を配送する自動配送ロボット・宅配ロボットサービスは、2016年ごろに本格的に始まったものと思われる。
同年、米ドミノ・ピザはオーストラリアのMarathon Targetsとの協業のもと宅配ロボット「DRU」の走行実証にオーストラリアで着手したほか、米Starship Technologiesも公道実証を加速し、同年12月に英国でパイロットサービスを開始した。
Starship Technologiesはその後も事業を拡大している。大半が大学構内だが、2023年までに米国、英国、ドイツ、デンマーク、エストニアの30カ所以上でサービスを提供しており、累計配送回数は400万回を超えている。
日本では、ZMPが他社に先駆けて宅配ロボット「DeliRo(開発当初はCarriRo Deli)」を2017年に発表している。現在、開発プレーヤーは大きく広がっており、道路交通法改正で公道走行が解禁される2023年には各社の取り組みが大きく加速するものと思われる。
【参考】Starship Technologiesについては「自動運転導入は大学キャンパスから!?米で100大学導入計画」も参照。
2016年:CASEの概念が登場
今や自動車業界では共通のビジョンとなった「CASE」。Connected(コネクテッド)、Autonomous(自動運転)、Shared & Services(シェアリングとサービス/シェアリングのみを指す場合もある)、Electric(電動化)の頭文字をとった造語だ。
このCASEという言葉を生み出したのは、ダイムラーAG(現メルセデス・ベンツグループ)で当時会長兼CEOを務めていたDieter Zetsche氏だ。Zetsche氏は2016年9月に開催されたパリモーターショーで、自社の中長期戦略としてCASE戦略を発表した。
この考え方は瞬く間に業界に広がって大きな潮流となり、100年に一度の変革期に向けた戦略として各社が導入している。
【参考】関連記事としては「CASEの意味は?(2023年最新版) コネクテッドや自動運転を示す略語」も参照。
2017年:ドイツでレベル3可能にする道路交通法が改正
ドイツ政府は2017年、先進国の中でいち早くレベル3の公道走行を可能にする道路交通法改正を行った。ただ、当時は国際基準がまとまっておらず、事実上レベル3の社会実装は見送られている状況だ。
独Audiは同年、レベル3走行を可能にする「Audi AIトラフィックジャムパイロット」と同システムを搭載可能な新型「A8」を発表・発売したが、こうした状況を踏まえて同システムの搭載を見送っている。
なお、日本では2019年に改正道路交通法と改正道路運送車両法が成立し、翌2020年4月に施行されている。2020年6月に国連WP29で成立した国際基準を基にしており、事実上レベル3を解禁する中身となっている。
2017年:「プロジェクトアポロ」始動

中国では、IT大手百度(Baidu)がオープンソフトウェアプラットフォームを活用した自動運転開発プロジェクト「Project Apollo(阿波羅)=アポロ計画」を2017年4月に発表した。世界各国の開発企業100社以上が参画する世界最大級の事業体となり、中国内の自動運転開発を先導している。
これまでに金龍客車による自動運転バスやNeolixによる自動配送ロボット、第一汽車や北京汽車グループの自動運転タクシーなどが量産化段階を迎えており、今後の展開に注目が集まる。
【参考】百度の取り組みについては「百度(Baidu)自動運転開発の年表!アポロ計画推進、中国で業界をリード」も参照。
2018年:世界初の自動運転タクシーの商用サービススタート

グーグルの自動運転開発部門から分社化したWaymoは2018年12月、世界初となる自動運転タクシーの商用サービスを米アリゾナ州で開始した。
当初は一部ユーザーを対象にセーフティドライバー同乗のもとサービスを提供していたが対象を徐々に拡大し、2019年12月ごろにはセーフティドライバーなしの無人サービスの導入をスタートするなど、年々進化を遂げているようだ。
【参考】Waymoの取り組みについては「Waymoの年表!自動運転タクシーのフロンティア、Googleから分社」も参照。
■2020年代
2020年:スタートアップやベンチャーの上場ラッシュ
2020年に入ると、自動運転関連スタートアップなどの新規上場が相次ぎ始めた。Velodyne Lidar、Luminar Technologies、Innoviz Technologies、AEyeといったLiDAR開発企業が上場で先行していたが、2021年に入るとTuSimpleやAurora Innovationといった自動運転システム開発企業の上場も始まった。
今後もArgo AIら有力スタートアップの上場が続く見込みで、今後の動向に注目が集まる。また、上場手法としてSPAC(特定買収目的会社)を選択する企業が多く、ソフトバンクグループのように受け皿となる買収用企業を用意する動きが出ている点にも注目したい。
2021年2月:Woven City着工

トヨタは2021年2月、実証都市「Woven City(ウーブン・シティ)」の建設を静岡県裾野市の工場跡地で開始した。モビリティやIoT、エネルギーなどさまざまな領域の研究を実証する場として一から都市づくりを進めていく一大プロジェクトだ。
実証を行うパートナー企業にはすでにENEOSが名乗りを上げており、水素エネルギー関連の実証を進めていく構えだ。このほか、日清食品もWell-Beingの実現に向けた実証について検討を進めている。
Woven City は2024~2025年に第1期オープンする予定で、その後も継続的に実証環境の構築や先進都市づくりを進めていく方針だ。
こうしたリアルな実証環境は、自動運転をはじめとした先進技術の研究開発に非常に有効だ。英ジャガー・ランドローバーの「SMART CITY HUB」やミシガン大学の「Mcity」など、自動運転実証に有効な取り組みが世界各地で進められている。
【参考】Woven Cityについては「Woven City、第1期は2024年開業か 初期住民は360人」も参照。
2021年3月:レベル3を実装したホンダ「レジェンド」発売

ホンダは2021年3月、レベル3機能を搭載した世界初の量産車として新型「レジェンド」を発売した。リースによる限定100台の販売となったが、新たな歴史を切り開いた格好だ。
レベル3を可能にする「トラフィックジャムパイロット」は、高速道路などにおける渋滞時に自動運転を可能にする。実用域を考えるとまだまだ制限が多いが、こうした社会実装から得られた知見がシステムの高度化に寄与する。今後の進化に期待大だ。
【参考】ホンダの取り組みについては「ホンダの自動運転戦略まとめ 世界初のレベル3量産車を発売」も参照。
2021年5月:ドイツでレベル4可能にする道路交通法改正案が成立
ドイツ連邦議会は2021年5月、レベル4を可能とする道路交通法改正法案を可決した。自動運転車が備えるべき技術要件や走行許可に関する規定、走行に携わる者の義務などがそれぞれ明示されている。2022年中に施行されるものと思われる。
詳細は省くが、レベル3時の改正とは異なり、レベル4実装を可能とする内容となっている。現在自動運転タクシーなどのレベル4サービスで先行する米国や中国は、それぞれの州や市の許可のもとサービスを提供しており、国家としてはまだ法整備が進んでいない状況だ。
今後、レベル4サービスの実証やサービス展開を見込む世界各国の開発企業がドイツに集結する可能性もあり、引き続き動向を注視したい。
【参考】ドイツの自動運転法については「ドイツの「自動運転法」を徹底解説 データは13項目保存を義務化」も参照。
2021年7月:FoxconnがMIHコンソーシアム設立

台湾のFoxconn(フォックスコン)グループが、EV(電気自動車)開発に向けたオープンプラットフォーム「MIH」の本格展開に向け、コンソーシアムを始動させた。
従来の自動車産業が抱える開発コストの高さや開発期間の長さ、リソース不足といった課題に対し、ハードウェアやソフトウェアの技術をオープン化して新たな自動車開発・製造の仕組みを構築していく取り組みで、2023年1月時点で2,700社 を超える企業が参画する世界最大規模のアライアンスとなっている。
2023年末までにデモンストレーションモデルを構築・発表する予定で、製造・生産能力が確立されれば、従来とは異なる形で自動車業界に参入する企業が大きく増加する可能性も考えられる。
EV開発に合わせて車両の自動運転化も視野に入れており、この分野では日本のティアフォーが関わっている。自動運転車の量産化が進む今後、MIHが業界にどのようなイノベーションを巻き起こすのか、要注目だ。
【参考】MIHについては「Foxconn、自動運転EVの受託生産開始へ!米NVIDIAと提携」も参照。
2022年:無人自動運転タクシーの競争が本格化

Waymoに続き、GM傘下のCruiseが2022年2月、カリフォルニア州サンフランシスコで自動運転タクシーサービスを開始した。同年6月には有料化の認可を受け、本格的な無人移動サービスを実現させた。
Waymoもアリゾナ州に続きカリフォルニア州でサービスインするなどエリア拡大に着手しており、無人自動運転タクシーの競争がいよいよ本格化し始めた。
中国でもバイドゥが無人サービスを開始するなど着々と実績を積み上げている。国や州、都市などが制定する交通ルールに依存するところだが、セーフティドライバー付きのサービス実証が一定の実績を積み重ねたことで、無人化を容認する動きが徐々に拡大していくものと思われる。
自動運転タクシーの開発分野には、AutoXやWeRide、Pony.ai、Motional、Mobileyeなど有力企業が揃っており、実用化を目指す動きは加速の一途をたどっている。
今後、各社のサービスが競合するエリアが増加し、競争はますます激化することになりそうだ。
【参考】自動運転タクシーの動向については「WaymoとGM Cruise、自動運転タクシーでガチンコ勝負」も参照。
2022年1月~:レベル4車両の量産が本格化、販売計画も

中国を中心に自動運転タクシーの実用化・フリート化が大きく進み、レベル4車両の量産化も本格化している。中国スタートアップのAutoXは2022年2月までに、自動運転タクシーのフリートが1,000台を超えたと発表した。
7都市で自動運転タクシーサービスを展開する百度は同年6月、レベル4のEVコンセプトカー「ROBO-01」を発表した。浙江吉利控股集団との合弁・集度汽車(Jidu Auto)が製造を行い、2023年にも納車を開始する予定という。
また、7月に発表した最新モデル「RT6」では、1台当たりの生産コストを25万元(約500万円)まで低下させることを可能にしたことも発表している。
自動運転タクシーの豊富なサービス実証の成果と、低価格を実現するだろう車両生産技術は、今後移動サービス事業者を巻き込む形で新たな自動運転市場を形成していく可能性が高そうだ。
【参考】百度の取り組みについては「百度、製造費500万円の自動運転車 無人タクシーで使用」も参照。
一方、イスラエルのモービルアイも2022年1月、浙江吉利控股集団との協業のもと、レベル4を搭載したコンシューマー向け自動運転車を共同開発し、2024年にも中国で発売する計画を発表している。
自家用車へのレベル4搭載を見据えた取り組みが早くも始まっており、こうした動きが今後他社にどのように影響していくか、要注目だ。
【参考】モービルアイの取り組みについては「自動運転で未知の領域!「市販車×レベル4」にMobileyeが乗り出す」も参照。
2022年3月:NHTSAが自動車の安全基準見直しへ

米運輸省道路交通安全局(NHTSA)は2022年3月、連邦自動車安全基準(FMVSS)の改訂を見据え、従来の手動制御装置を備えない自動運転車を対象とした乗員保護安全基準に関する最終規則を公表した。
自動運転開発の進展とともに、ハンドルやアクセルといった手動制御装置を備えない自動運転専用に設計されたモデルも増えてきた。そもそも運転席を備えず、すべての車内空間を乗員向けに設えたモデルも多い。
これらのモデルは、手動運転を前提とした従来の保安基準に合致しない。旧来の道路交通法がドライバーの存在を前提としていているように、保安基準もまたドライバーの存在を前提としているのだ。
NHTSAの今回の取り組みは、こうした状況を打開し自動運転専用車両の公道走行を一般化するためのものだ。
米国では2020年、車道を走行する配送ロボットの開発を手掛けるNuroがオリジナルモデル「R2」の保安基準に関わる規制免除を米国運輸省(DOT)とNHTSAに申請し、許可を得ている。
Cruiseも2022年2月、自動運転専用設計の「Origin(オリジン)」の商用サービスを可能にする承認を求めNHTSAに請願書を提出している。
スウェーデンのEinrideは同年6月、オリジナル車両を米国内の公道で運用する認可をNHTSAから得たと発表した。一方、アマゾン傘下のZooxのように、走行に必要とされる安全性能要件を自己認証する手法を採用するケースも出ている。
自動運転専用設計の車両は今後も続々と登場することが予想されるが、明確な基準を持って公道走行を認可する新たなルール作りが肝要となりそうだ。
【参考】NHTSAの取り組みについては「自動運転車の解禁、世界で加速!米当局、ハンドルなし車両を認可へ」も参照。
2022年4月:日本でもレベル4改正法が可決
レベル4や自動走行ロボットの公道走行を盛り込んだ道路交通法改正案が2022年の通常国会で審議され、4月に可決・公布された。改正法は2023年4月までに施行される。
運転者がいない状態で自動運行装置のもと自動車を運行することを新たに「特定自動運行」と定義し、運転者の存在を前提としている従来の「運転」には該当しないものと位置付ける内容だ。特定自動運行を行う者は特定自動運行主任者を指定し、特定自動運行計画を作成して都道府県公安委員会に申請し、許可を受けなければならない。
合わせて、自動走行ロボットを公道走行させるための法整備も行われた。原動機を用いる小型の車で遠隔操作で走行させるもののうち、車体の大きさや構造が一定基準に該当するものを「遠隔操作型小型車」と定義し、その交通方法に関する規定整備とともに、使用者は都道府県公安委員会に届出を行わなければならない旨が定められた。
現在、福井県永平寺町などの車道外で遠隔監視・操作によるレベル3運行が行われているが、こうした取り組みをレベル4に進展させる非常に意義深い改正となりそうだ。
【参考】道路交通法改正については「【資料解説】自動運転レベル4を解禁する「道路交通法改正案」」も参照。
2022年5月:レベル3の市場化が本格化

ホンダが先陣を切ったレベル3市場が、2022年に入って活気づいてきた。ホンダに続き、メルセデス・ベンツ・グループもレベル3の販売を開始したのだ。フラッグシップモデルの「Sクラス」とEV「EQS」にレベル3をオプション設定し、ドイツ国内で自動運転走行を可能とした。米国展開に向けた取り組みも進めているようだ。
このほか、BMWやボルボ・カーズなども米国でレベル3搭載車両を販売する計画を進めているようだ。韓国ヒョンデも自国でレベル3を展開する見込みだ。
当初、レベル3実装に関しては様子見を決め込むメーカーも少なくなかったが、レベル4への足掛かりとして有用な点や、国際基準の改訂などがプラス材料となり、市場化を目指す動きが活発化している印象だ。
2020年に合意されたレベル3に関する国際基準は、2022年までに最高時速60キロから130キロへ、また車線変更も可能とするなど大きく緩和されている。こうした改訂により、高速道路渋滞時が前提だったレベル3は実用域での使用も可能となった。
さらなる技術開発でこうした要件を満たすレベル3が市販化されれば、同市場は大きく前進することになりそうだ。
【参考】メルセデス・ベンツのレベル3については「自動運転、2社目の「レベル3提供」はメルセデスベンツ」も参照。
2022年10月:Argo AIが事業停止
有力スタートアップの米Argo AIが事業停止に追い込まれた。大口出資元の米フォード、独フォルクスワーゲンがともに出資を引き上げたためだ。
同社は、グーグルの自動運転開発部門で活躍したブライアン・サレスキー氏らが2016年に設立したスタートアップで、その開発力は当初から高い期待が寄せられていた。
マイアミとオースティンで自動運転タクシーのサービス実証に着手するなど事業は順調に進んでいると思われていたが、フォードなどは費用対効果や自動運転戦略の変更などを背景に同社からの撤退を決定したようだ。
こうした事例は、今後自動運転業界で続発する可能性もある。Argo AIのケースは個別の要因も含まれていそうだが、自動運転開発に掛かる膨大な費用と、サービス実用化・収益化に至る期間を再考した際、投資家や企業が戦略を変更する可能性は十分考えられる。
世界各地で気を吐くスタートアップが続々頭角を現しているが、各社にはスピード感あふれる開発とともに収益化に向けた明確なビジョンを求められることになりそうだ。
【参考】Argo AIについては「自動運転業界、誰も予想してなかった「Argo AI閉鎖」の背景」も参照。
2022年10月:モービルアイ上場
インテル傘下のイスラエル企業モービルアイが、米ナスダック市場に上場した。初日の終値ベースの時価総額は230億ドル(約3兆4,000億円)に及び、自動運転業界では過去最大の大型上場となった。
同社はADAS(先進運転支援システム)ソリューションで高い実績を誇り、近年は自動運転向けのSoCでもシェアを拡大している。また、独自開発した自動運転システムも完成度が高く、2023年からドイツをはじめイスラエル、ドバイなど世界各国で導入に向けた取り組みを本格化させていく計画だ。
ADASやSoCなどで企業としての土台をしっかりと固め、そのうえで自動運転開発・実用化を推し進める戦略が高い評価を得ているようだ。
日本での自動運転サービスも計画されており、今後の動向に大きな注目が集まるところだ。
【参考】Mobileyeについては「Mobileyeの3兆円IPO、自動運転業界初の「ちゃんとした上場」?」も参照。
■2010年代以降の開発速度はすさまじい
自動運転手法は大きく変遷しているものの、現代につながるコンピュータービジョンを活用した研究開発は早くから進められており、日本の研究者も国内外で活躍していたことが分かった。
また、スタンフォード大学やカーネギーメロン大学など自動運転開発に高い実績を持つ機関も早くから研究開発を積み重ねており、巣立ったエンジニアらがDARPA(米国防高等研究計画局)やグーグルの取り組みをきっかけに今日の自動運転開発競争をけん引している点も非常に興味深い。
GMによる自動運転構想から80年、コンピュータービジョンを活用したシステム開発からも40年余りが経過した現在、未来を描いた構想や将来技術は現実のものとなり、実用化域に達した。2020年代に入り、法整備も着実に進展している。
特に、AI(人工知能)技術の進展により2010年代以降の開発速度はすさまじく、日進月歩で進化し続けている。日々歴史を塗り替えるような開発が進む自動運転業界の取り組みに引き続き注目だ。
■現在の各国・地域における開発・法改正の現状は?
これまで説明した歴史からも分かるように、世界各国で自動運転技術の開発が進み、すでに実用化の域に達しつつある。この流れはさらに加速し、2020年代は自動運転レベル3〜4の技術が徐々に一般に浸透していくフェーズとなる。
各国・各地域の自動運転の最新事業は、自動運転ラボがそれぞれ別な記事でまとめているので、参照してほしい。
▼日本における最新状況
https://jidounten-lab.com/u_31862
▼アメリカにおける最新状況
https://jidounten-lab.com/u_32920
▼欧州における最新状況
https://jidounten-lab.com/u_34905
▼アジアにおける最新状況
https://jidounten-lab.com/u_35017
▼中東における最新状況
https://jidounten-lab.com/u_35042
■関連FAQ
1939〜40年にかけて、GMがニューヨークの万博博覧会で巨大ジオラマを展示し、そのジオラマの中で自動運転を可能とする高速道路を披露した。もっと昔にも自動運転の構想があったかもしれないが、一般的にはこのGMの構想が最も古いとされている。
2004年に米国防高等研究計画局(DARPA)が開催した「DARPA Grand Challenge(DARPAグランドチャレンジ)」だ。砂漠地帯142キロ(約230キロ)を自動運転で走破するという大会で、のちにGoogleの自動運転部門を担当するセバスチャン・スラン氏や、Cruiseを創業するカイル・ヴォグト氏などが参加していたことで知られている。
現在使われている自動運転レベルの定義は、米自動車技術会(SAE)が策定した定義で、SAEが2016年に改訂した定義が日本を含め世界的に主流となっている。0〜5の6段階で自動運転レベルが定義されている。
2018年12月だ。Google系Waymoがアリゾナ州フェニックスで、運転席にセーフティドライバーが同乗する形での自動運転タクシーをローンチした。ちなみにWaymoは2019年12月から、一部車両でセーフティドライバーを乗せない形態でのサービスも運用している。運行エリアを拡大し、すでにサンフランシスコでも運行している。そんなWaymoの一番のライバルはGM Cruiseで、GM CruiseもWaymoに遅れながらも、すでに自動運転タクシーサービスをローンチしている。
2021年3月だ。ホンダが「新型LEGEND」に自動運転レベル3の機能を搭載し、100台限定で発売した。車両価格は税込1,100万円だった。今後も各社が続々とレベル3の発売を発表するものとみられる。
(初稿公開日:2021年11月17日/最終更新日:2023年2月3日)
【参考】関連記事としては「自動運転が可能な車種一覧(2022年最新版)」も参照。







の意味・読み方は?自動車業界の新潮流を示す")
ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

