


自動運転時代の都市構造や都市交通、交通施設のあり方などについて検討を進める「都市交通における自動運転技術の活用方策に関する検討会」は2023年度以降、自動運転車両の導入や関係する都市施設の整備・デザインに関するガイドラインの作成に着手する。
都市において、自動運転サービスにはどのような期待が寄せられ、都市構造などはどのように整備されるべきなのか。自動運転時代を見据えた同検討会の議論の中身に迫る。
▼第1回都市交通における自動運転技術の活用方策に関する検討会(R4.12.13)会議資料
https://www.mlit.go.jp/toshi/toshi_gairo_fr_000087.html
▼都市交通における自動運転技術の活用方策に関する検討会 検討会資料
https://www.mlit.go.jp/toshi/content/001584037.pdf
記事の目次
■検討会のこれまでの取り組み
都市交通や交通施設のあり方などについて検討に着手
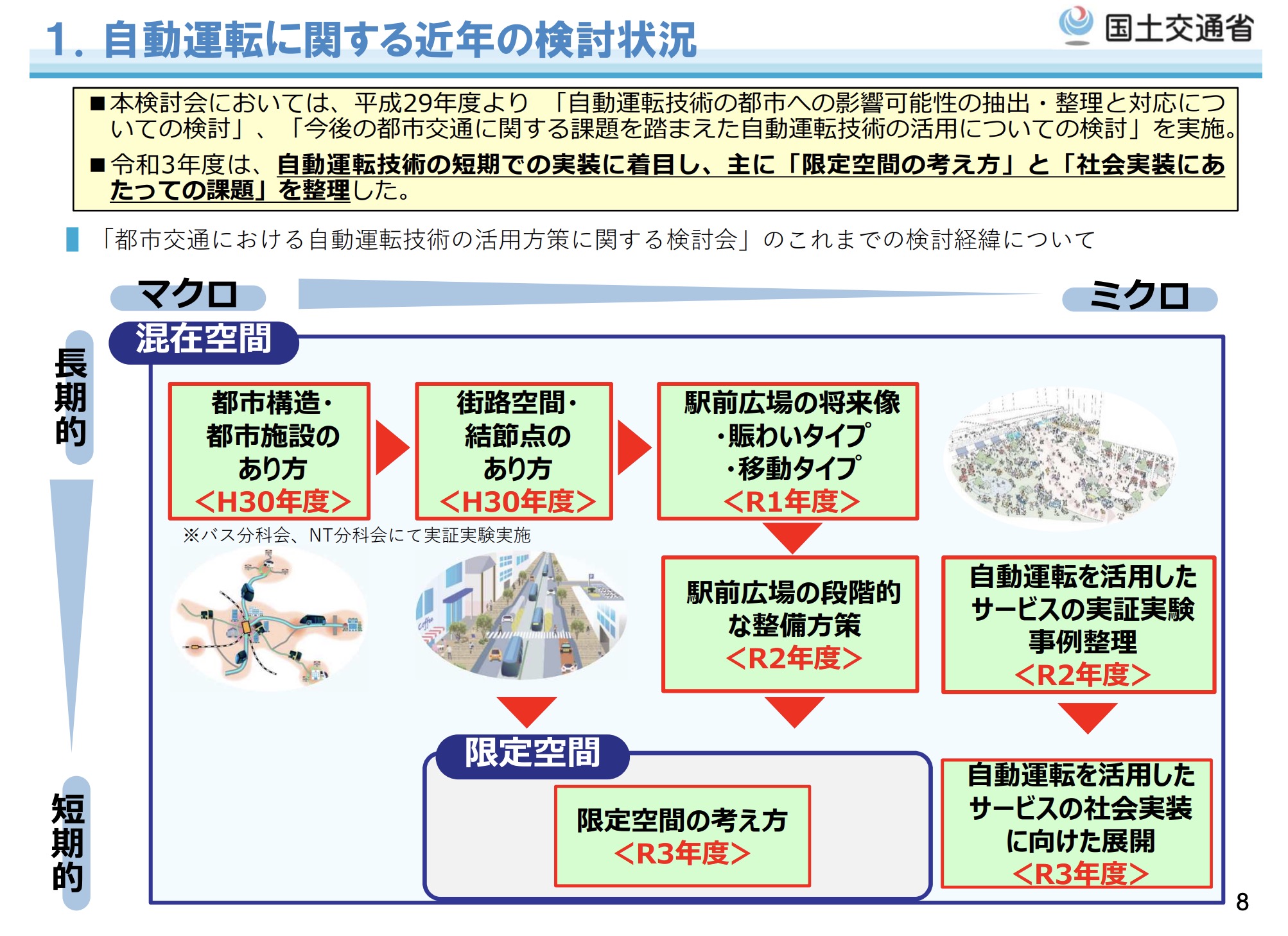
同検討会は、将来的に普及が見込まれる自動運転が、都市構造・都市交通や交通施設にどのような影響を及ぼすかを洗い出し、都市にとって望ましい自動運転技術の活用について検討を進めようと2017年に設置された。
自動運転技術の動向把握を進め、マクロ・ミクロ視点による都市構造・都市交通や交通施設について検討を進めるとともに、サービスに着眼した自動運転技術の活用方策について検討を実施してきた。
2018年度は、自動運転社会における望ましい都市交通のあり方や都市交通施設のあり方、街路空間・交通結節点のあり方などについて検討を進めた。公共交通を中心とした最適な交通手段を提供できる都市交通マネジメントを実施し、移動範囲や移動手段に応じた最適な交通手段を選択可能な都市交通が望ましいとしている。
また、公共交通が欠けていたエリアにおいても自動運転を活用した新たな公共交通が導入可能なほか、自動運転でファーストマイル・ライスとマイルを担う移動手段を充実させ、これらと基幹的な公共交通間の乗り換え利便性を向上させることなども有効としている。
都市交通施設に関しては、公共交通の走行環境の確保や安全かつ円滑な乗り換え環境の確保、歩道の利活用、適正な駐停車環境の確保などの必要性を挙げている。
駅前広場に関しては、広場空間における自動運転車の待機方法の合理化を図ることで、創出された空間を溜まり・賑わい機能に活用することや、多様な交通モード間の円滑な乗り換えを可能にする環境確保などが望ましいとしている。
駅前広場は「移動タイプ」と「賑わいタイプ」を設定
2019年度からは駅前広場の将来像や段階的な整備方策に関する検討を本格化させている。駅前広場については、「移動タイプ」と「賑わいタイプ」を設定し、それぞれ求められる機能や段階整備のあり方に至るまで検討を重ねた。
移動タイプの駅前広場では、分かりやすく円滑な移動経路提供やワンストップでシームレスな移動サービスの提供、交通コントロールを通じたトラフィックのスマート化、周辺市街地との一体的な整備の推進などに向け、中期的には環境空間の拡張を図りつつ歩行者と分離して自動運転の走行空間を確保していくべきとしている。
自動運転が普及する長期視点では、フレキシブルに交通空間と環境空間を使い分けてさらなる環境空間の拡張を図っていく。
賑わいタイプの駅前広場では、中期的には環境空間の拡張を図り、都市の拠点形成のために必要な賑わいや防災などの機能を確保し、幹線バスなど輸送密度の高い交通手段を確保しながら歩行者と分離して自動運転の走行空間を確保することとしている。長期的には、交通空間を最小化した環境空間中心の広場を形成していく。
取り組むべき課題としては、人流データなどを活用したプランニングの実施や周辺街区との連携、移動を補助するモビリティの乗入れ、運賃収受システム(事前決済など)の構築、自動運転インフラ協調システムの整備、適地でのプール確保、自動運転に対応した駐車施設整備、配車システムの検討、交通事業者との連携、空間利活用手法の検討、周辺街区との連携などを挙げている。
自動・手動運転車間の乗り換えや切り替えといった接続機能にも留意
2021年度は、限定空間内外の接続機能のあり方や、自動運転技術を活用したサービスの持続的な提供について検討を進めた。
限定空間と混在空間では自動運転技術の社会実装の進度が異なることが考えられるため、短期的な社会実装への対応として限定空間内外の接続機能のあり方を検討した。
限定空間とするために留意すべき事項としては、例として以下などを挙げている。
- ①駐車場においては一般車や歩行者の入構を制限することや、車両・システムを限定すること
- ②中継拠点では、特定の事業者・車両のみ利用を許可すること
- ③専用走行空間では、自動運転専用の道路において単一のシステムで運行を行うこと
自動運転と手動運転の接続点に関しては、以下を検討課題に挙げている。
- ①既存駐車場の転用やIC周辺エリアなど接続点を設けるべき場所
- ②自動・手動運転車間の乗り換えや切り替えなど接続点が有すべき機能
- ③周辺市街地や周辺道路への影響、利用者の利便性、利用コストといった留意点
早期実装における技術面の課題としては、以下を挙げている。
- ①自己位置推定におけるインフラ・車両の連携
- ②車内の無人確認におけるインフラ・車両の連携
- ③障害物検知におけるインフラ・車両の連携
自動運転サービスの持続的な提供に向けては、混在空間における実証などの取り組みが増加していることを受け、都市側での対応方策を検討することとし、自動運転技術によって新たに生まれる多様なサービスの展開や、都市において各種サービスを持続的に提供するため都市側で進めるべき事項の整理を進めた。
サービス実装にあたり考慮が必要な事項としては、以下をを挙げている。
- ①安全性の確保
- ②インフラとのデータ連携
- ③自動運転の導入・運営コストの確保
- ④地域の理解
また、都市施設のあり方として以下などを検討課題としている。
- ①歩道幅員や車両との交錯、走行場所のルールなどの走行空間のあり方
- ②駐停車空間(モビリティハブ)のあり方
- ③データ連携のあり方
【参考】検討会における過去の議論については「都市部の配送、車を遠くに停め自動運転ロボが配達 こんな未来も」も参照。
■2022年度の取り組み
ガイドライン策定に向け検討を具体化
2022年度は、コンパクト・プラス・ネットワークを実現する自動運転技術の早期の実装・展開を見据え、「公共交通」と「まちとの関係」などに着目し、より具体的かつ実践的な検討を行うこととしており、2023年度以降に都市側で検証すべき課題について追加の実走実験を実施し、自動運転車両の導入や関係する都市施設の整備・デザインに関するガイドラインの作成に着手するとしている。
自動バレーパーキング導入やPLATEAUとの連携も視野に
2022年度の主な検討項目として以下を据え、実証を行っている都市へのヒアリングなどを実施した。
- ①公共交通軸の形成
- ②歩行空間への導入
- ③自動バレーパーキング(AVP)
- ④PLATEAUとの連携
①「公共交通軸の形成」に関しては、速度や輸送力など十分なサービス水準の確保が必要なため、走行速度などの制約が少ない限定空間への先行導入を検討するほか、さまざまなケースに対応できるよう、限定空間・混在空間の接続や混在空間への導入に必要な事項についても合わせて検討を行っていく。
②「歩行空間への導入」に関しては、歩道における歩行者やベビーカー、車椅子、自転車などの通行状況を踏まえた歩行空間の利活用が重要で、ロボットの通行レーンやデポの配置、ロボットが走行可能な道路の設定、歩行者や自転車に対する通行ルールの策定など、利活用のあり方を総合的に検討していく。
また、ロボットに対しても有用な都市空間のバリアフリー化や、ロボットを活用した都市サービスに対する市民のニーズについても検討を進めていく。
③「自動バレーパーキング」に関しては、早期導入に向け責任分界点の明確化や駐車場側での障害物検知、ルート生成、自己位置推定などによる車両誘導方法について検討する。
また、センサーやシステムなどの設備や乗降場所、駐車マスなどの構造基準、安全確保のための対策など、駐車場側に求められる構造・設備などについても整理していくほか、自動運転レベルに応じて駐車場に求められる要件や、普及動向を踏まえた将来的な駐車場のあり方の検討などにも着手する。
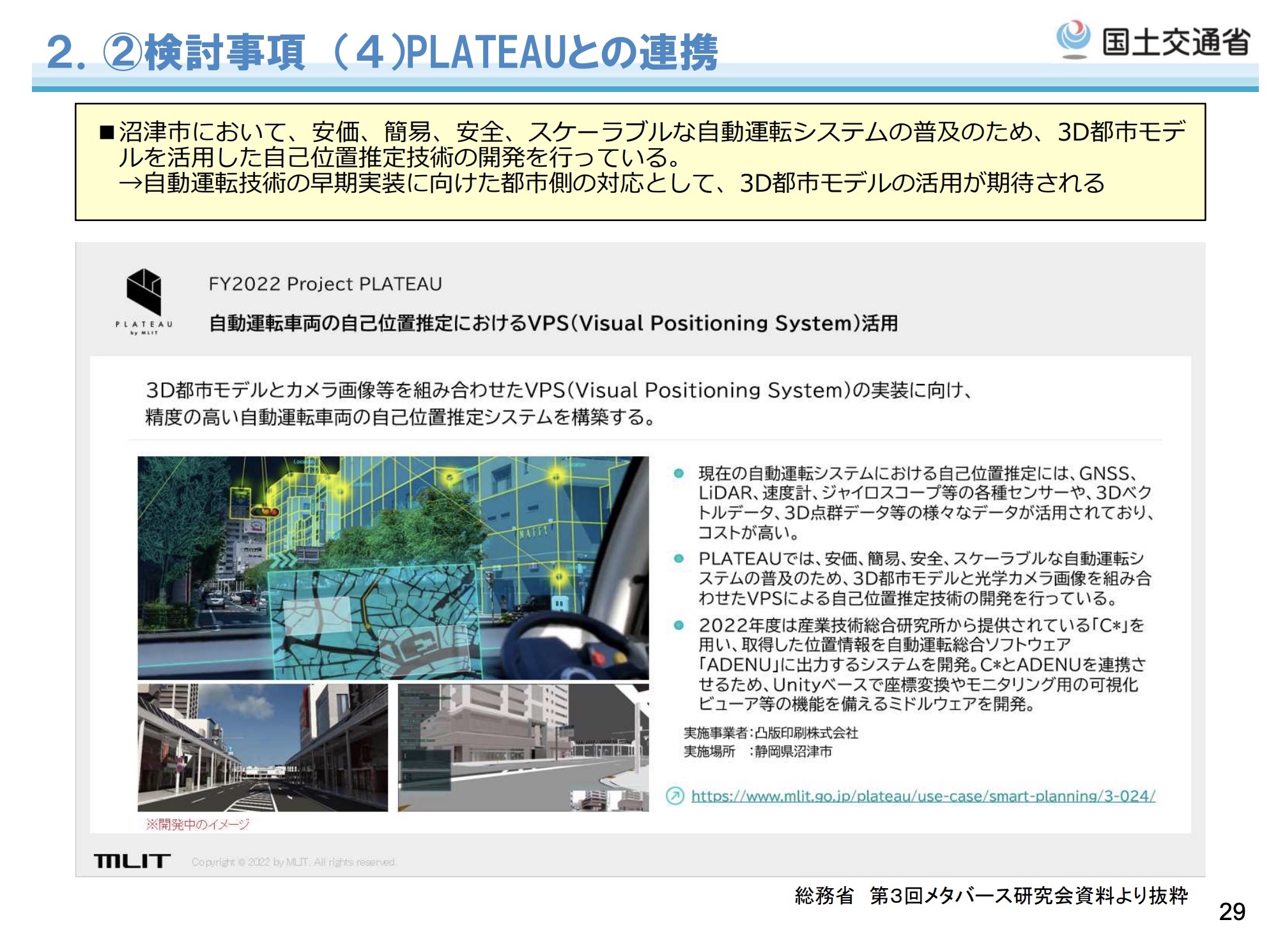
④のPLATEAUは、まちづくりのDXに向けたデジタルインフラとなる3D都市モデルの整備・活用・オープンデータ化を推進するプロジェクトだ。
事例として、安価でスケーラブルな自動運転システムの普及のため3D都市モデルを活用した自己位置推定技術の開発を行っている沼津市を挙げ、自動運転技術の早期実装に向けた都市側の対応として、こうした3D都市モデルの活用が期待されるとしている。
■【まとめ】ガイドライン策定は2024年度以降に
2023年度は、各種実証の実施や検証、PLATEAUとの連携方策の実施計画案の策定などとともにガイドライン策定に向けた検討を本格化し、各種課題に対する一定の指針を盛り込んだうえで2024年度以降にガイドラインを策定する見込みだ。
自動運転時代に求められる都市構造などがどのようなものになるか、今後具体化されていく方策に注目だ。
※自動運転ラボの資料解説記事は「タグ:資料解説|自動運転ラボ」でまとめて発信しています。
【参考】関連記事としては「自動運転と法律・ガイドライン」も参照。

とは?いつ実現?")





の意味・読み方は?自動車業界の新潮流を示す")
ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

