


世界各国で実用化に向けた取り組みが進展する自動運転。日本国内でも自動運転レベル4が2023年に解禁され、ドライバーレスによるサービスが徐々に増えてきた。
技術の進展がこうした実用化を支えているのは言うまでもないことだが、もう一つ重要な要素がある。「規制」だ。既存の自動車と性質が異なるため、法律などで自動運転走行が明確に認められなければ公道走行はままならないのだ。
自動運転に対する規制はどのように整備されているのか。日本の道路交通法や道路運送車両法、道路法などのほか、海外を含め、詳しく解説していく。
【参考】関連記事としては「日本では自動運転はできる?規制や法律は?」も参照。
・2025年10月1日:道交法などに関する関連記事を追加
・2025年5月22日:海外諸国の法律・規制について追記
・2024年2月7日:「農業機械の自動走行に関する安全性確保ガイドライン」の情報を追加
・2023年10月4日:道路交通法や道路運送車両法関連の情報を更新
・2020年12月28日:記事初稿を公開
記事の目次
■道路交通法
2020年4月の法改正:自動運転レベル3を解禁
手動運転がメインとなるが、条件付きで自動運転を実現するレベル3に対応するため、2020年4月に改正道路交通法が施行された。
改正法では、自動運行装置を使用した運転も従来の運転に含めることとしたほか、作動状態記録装置が不備な状態での運転を禁止するとともに、データの保存も義務付けている。
また、自動運転時のドライバーには、同法第71条第五号の五に定める携帯電話用装置やカーナビなどの画像表示用装置の利用を制限する条項を適用しないこととした。自動運転システムが正常に作動している限り、ドライバーはスマートフォンの使用やカーナビなどの操作を行うことが可能となった。
このほか、自動運転システムが作動する条件から外れた際は自動運行装置を使用した運転が禁止され、ドライバーは迅速に運転操作を引き継がなければならないことも定められている。
▼ついに日本で走り出す!自動運転“レベル3”の車が走行可能に|政府広報オンライン
https://www.gov-online.go.jp/useful/article/202004/1.html
2023年4月の法改正:自動運転レベル4(※移動サービスを想定)を解禁
2022年4月には、自動運転レベル4(高度運転自動化)を解禁する道路交通法の改正案が国会で成立した。その後、2023年4月に施行され、レベル4が解禁された。
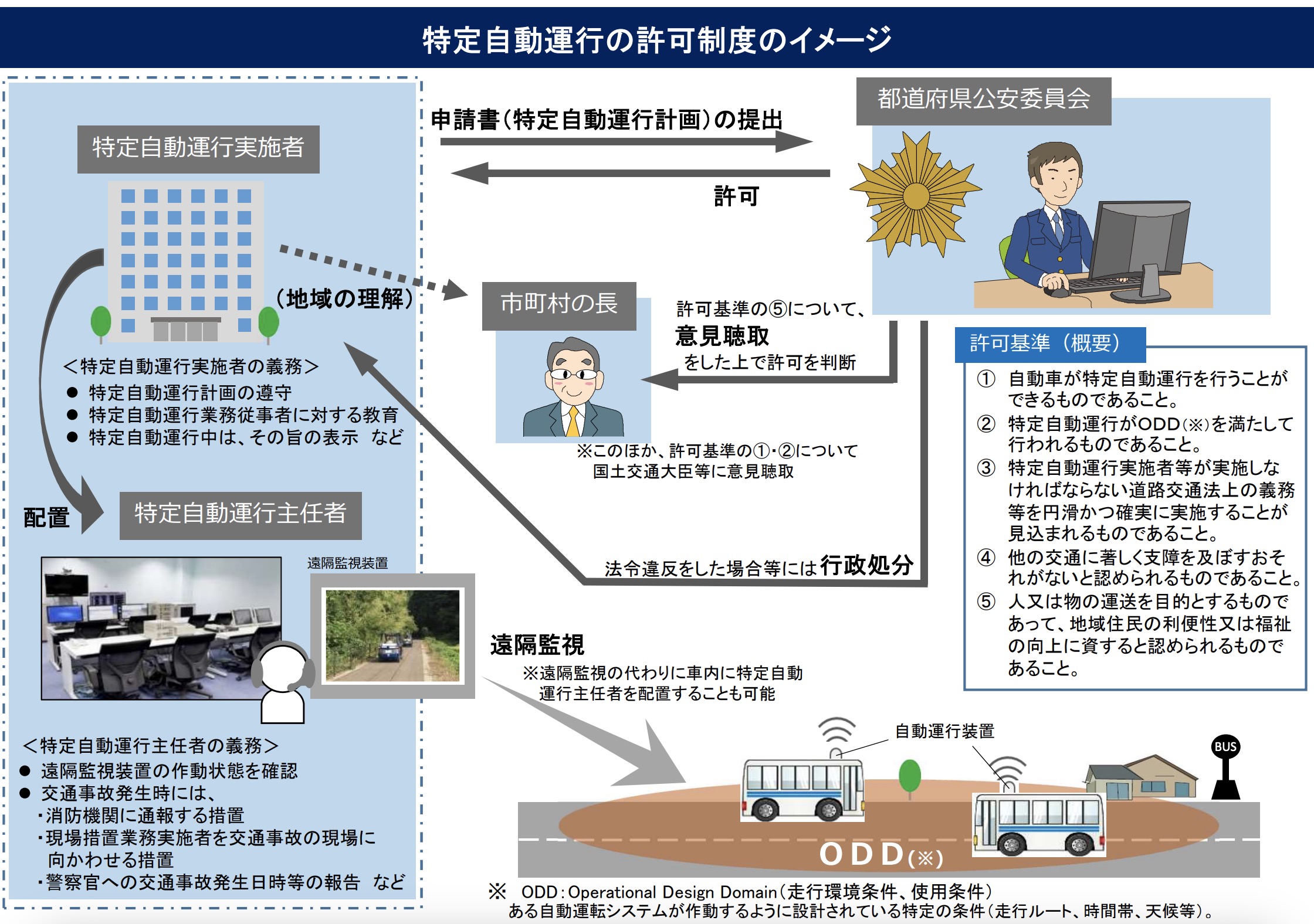
この法改正におけるレベル4の解禁は、オーナーカーのレベル4ではなく、自動運転車を使ったレベル4の移動サービスの社会実装を見越したものだ。こうした移動サービスを都道府県公安委員会の許可によって展開できるようにするという内容だ。
詳しくは以下の警察庁のウェブページを参考にしてほしい。
▼特定自動運行に係る許可制度の創設について|警察庁
https://www.npa.go.jp/bureau/traffic/selfdriving/L4-summary.pdf
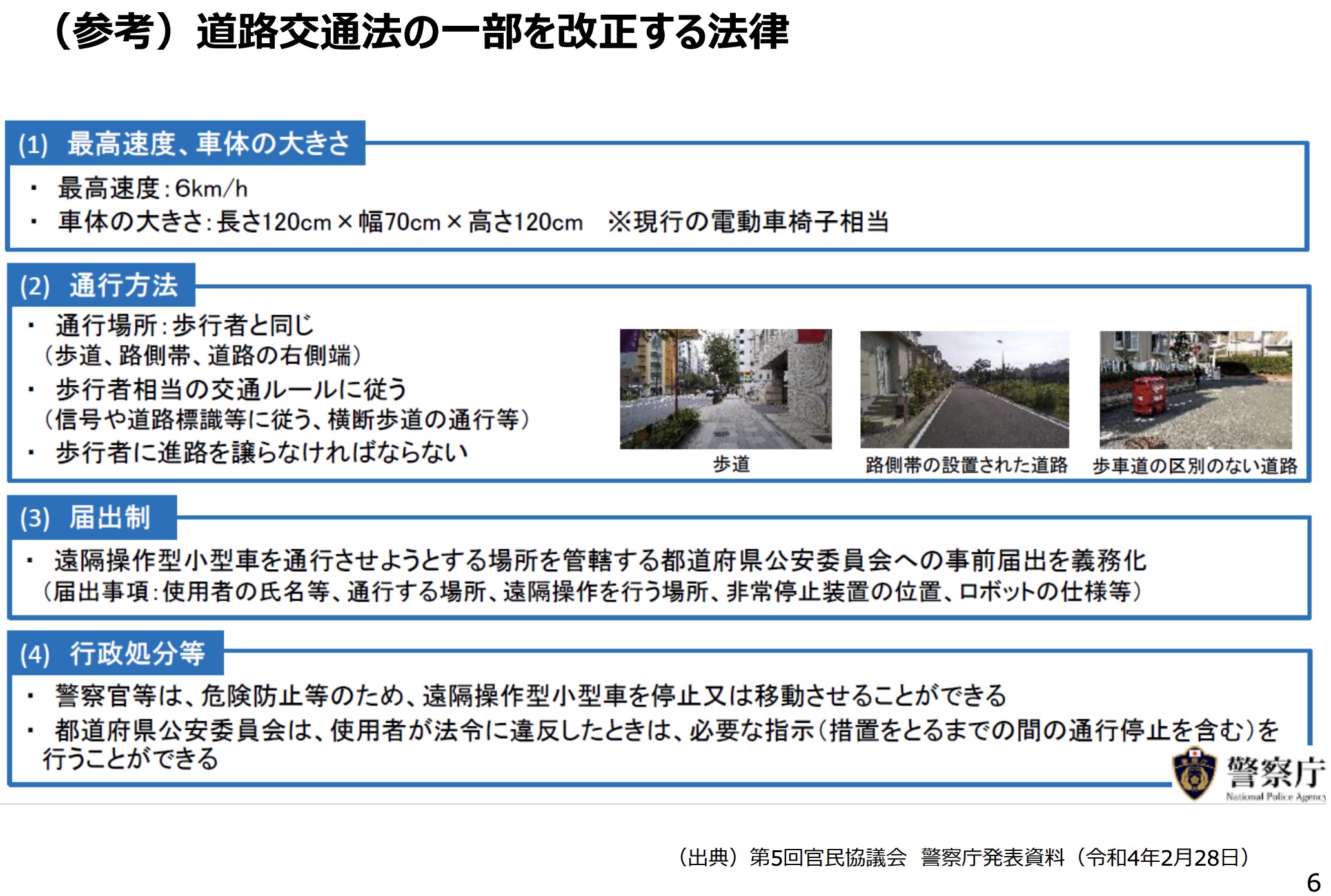
また今回の道路交通法の改正では、自動配送ロボットのルールも盛り込まれている。最高速度は時速6キロ以下と規定され、歩行者と同じエリアを走行可能になる。自動配送ロボットを展開する事業者も、都道府県公安委員会に届出を行う必要があるとした。
自動配送ロボットに関するルールについては、以下の経済産業省公開の資料が参考になる。
▼自動配送ロボットの社会実装に向けて|経済産業省
https://www.meti.go.jp/press/2022/03/20230327001/20230327001-2.pdf
▼道路交通法|e-Gov法令検索
https://elaws.e-gov.go.jp/document?lawid=335AC0000000105
【参考】関連記事としては「自動運転AI向けに、道交法の「曖昧な表現」を明確化へ」も参照。
■道路運送車両法
2020年4月の法改正:自動運行装置を規定

道路交通法と同様、道路運送車両法も2020年4月に改正法が施行され、保安基準対象装置に「自動運行装置」が追加された。
▼道路運送車両法|e-Gov法令検索
https://elaws.e-gov.go.jp/document?lawid=326AC0000000185
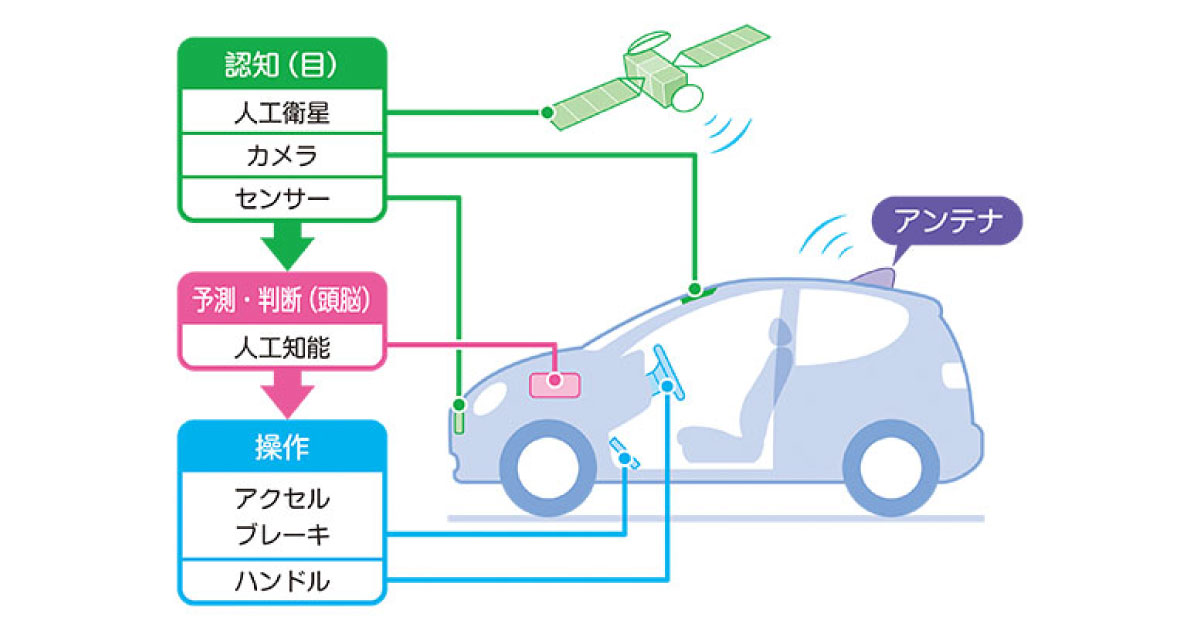
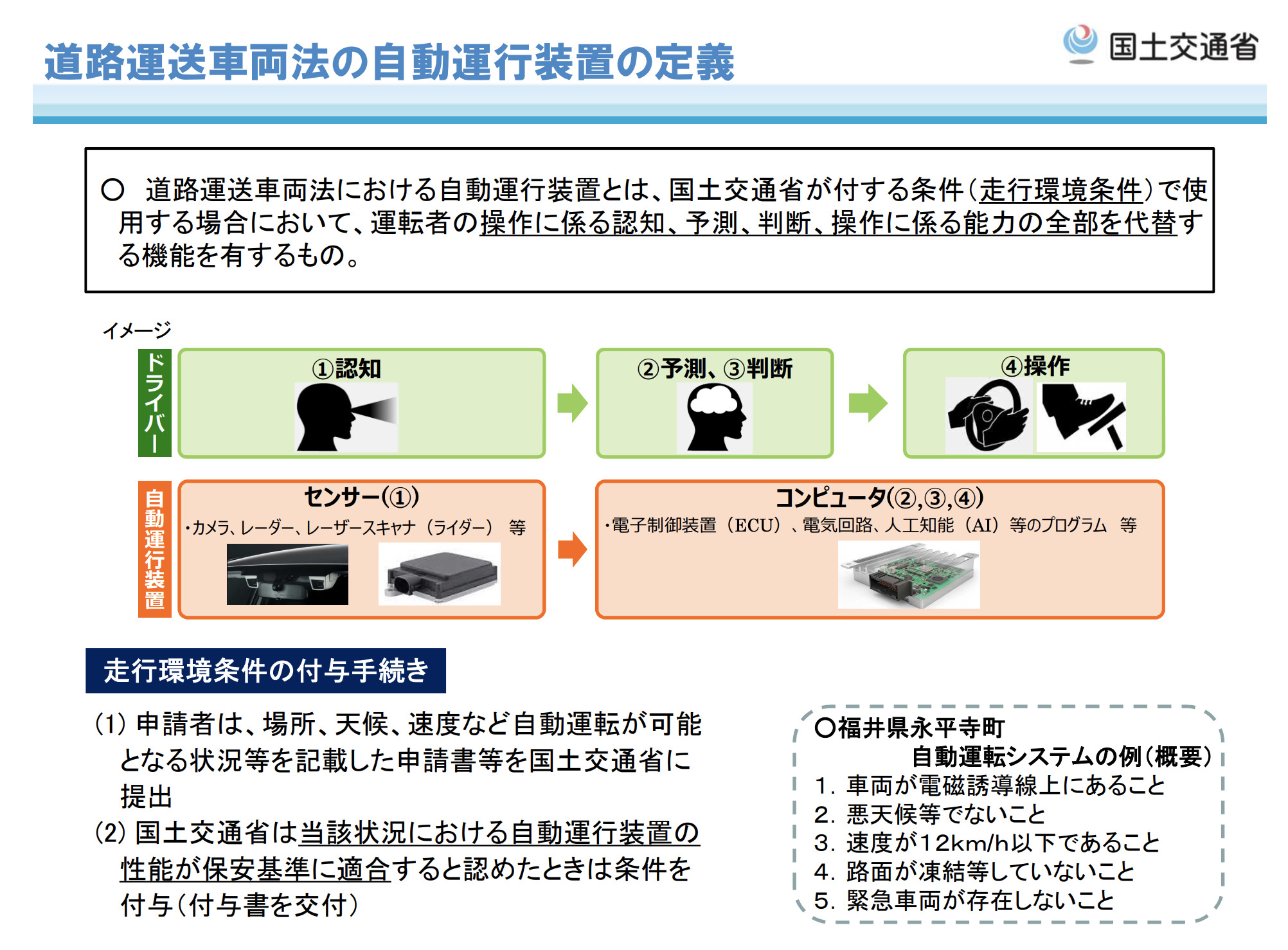
自動運行装置は、「プログラムにより自動的に自動車を運行させるために必要な、自動車の運行時の状態及び周囲の状況を検知するためのセンサー並びに当該センサーから送信された情報を処理するための電子計算機及びプログラムを主たる構成要素とする装置」であり、「運転者の操縦に係る認知、予測、判断及び操作に係る能力の全部を代替する機能を有し、かつ、当該機能の作動状態の確認に必要な情報を記録するための装置を備えるもの」と規定された。
また、従来の分解整備を「特定整備」に改め、事業として行う場合に認証が必要な「分解整備」の範囲に自動運行装置も加えられたほか、自動運行装置などに組み込まれたプログラムの改変による改造などに係る許可制度を創設し、許可に関する事務のうち技術的な審査を独立行政法人自動車技術総合機構に行わせることとしている。
2023年4月:道路運送法施行規則等の一部を改正
2023年3月31日に、道路運送法施行規則等の一部を改正する省令と関連告示が公布され、翌日の4月1日に施行された。この施行に伴い、「自動車運送事業者におけるICTを活用した新たな点呼(遠隔点呼・業務後自動点呼)」と、「自動車運送事業者等におけるレベル4相当の自動運転車を活用した事業」が実施できるようになった。
この改正は、運転者が不在の状態での自動運転を行うことが可能となる自動運転レベル4を解禁する2023年4月の道路交通法改正に合わせたものだ。具体的には、自動車運送事業者などが自動運転車を用いて事業を行う際、講ずるべき輸送の安全確保に関する措置や実施すべき手続きなどを規定している。
▼自動運転車を用いた自動車運送事業における輸送の安全確保等に関する検討会 報告書|国土交通省
https://www.mlit.go.jp/jidosha/jidosha_fr2_000044.html
【参考】道交法と道路運送車両法の改正については「【解説】自動運転解禁への道路交通法と道路運送車両法の改正案の概要」も参照。
■道路法
2020年11月:「自動運行補助施設」を新たに追加
道路に関する一般法である道路法も改正案が2020年2月に閣議決定され、同年11月から順次施行された。自動運転関連の内容は11月25日に施行されている。
▼道路法|e-Gov法令検索
https://elaws.e-gov.go.jp/document?law_unique_id=327AC1000000180_20201125_502AC0000000031
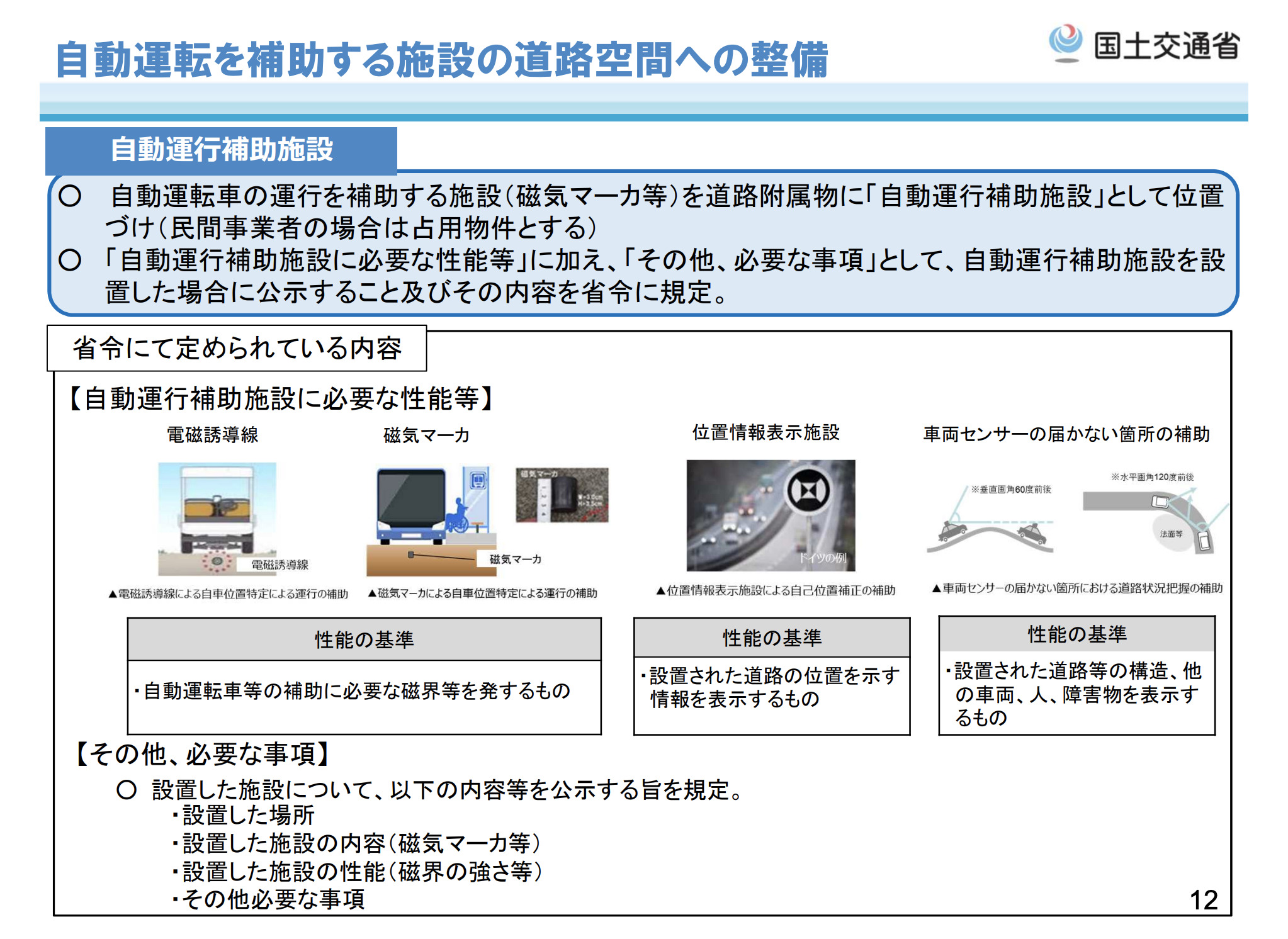
自動運転関連では、自動運転車の安全な運行を道路インフラ側から補助する「自動運行補助施設」が道路の附属物、及び道路の占用の許可に係る工作物、物件または施設として追加された。
道路管理者が自動運行補助施設を設置した場合は、その性能や設置した道路の場所などを公示しなければならないほか、民間事業者が設置した場合は占有物件となり、構造に支障を及ぼさない場合は車道上の設置も認めることとしている。
自動運行補助施設としては、車両に取り付けた磁気センサーモジュールで走路に敷設された磁気マーカーの磁力から自車位置を高精度に計測する「磁気マーカーシステム」が代表例として挙げられている。
今後、車両と道路インフラが通信するV2I(路車間通信システム)を活用した自動運転システムの導入も本格化していくことが予想されるため、自動運行補助施設の設置も次第に増加していくことが考えられる。
【参考】自動運行補助施設については「自動運転の「自動運行補助施設」に関する制度がスタート!2020年11月25日から」も参照。
■電波法なども改正の動き
第5世代移動通信システム「5G」の普及を見据え、同じ周波数の電波を共同利用しやすくする仕組みの導入に向け総務省が電波法の改正案を取りまとめているほか、自動車損害賠償保障法等にも改正に向けた動きがあるようだ。貨物自動車運送事業法や道路運送法なども含め、自動運転に関連する法律の改正はまだまだ続きそうだ。
■自動運転車の安全技術ガイドライン
自動運転車の導入初期段階において車両が満たすべき安全要件として、レベル3とレベル4の自動運転システムを対象に国土交通省が2018年9月に発表した。
▼自動運転車の安全技術ガイドライン
https://www.mlit.go.jp/common/001253665.pdf
自動運転車が満たすべき車両安全の定義を「許容不可能なリスクがないこと」、つまり運行設計領域(ODD)において防止可能な事故が生じないことと定め、この定義に基づいて自動運転車が満たすべき車両安全要件を設定し、その安全性を確保することとしている。
ODDの設定
ODDは以下の①〜④などを基に、個々の自動運転車が有する性能や使用の態様に応じて設定することとしている。
- ①高速道路や一般道、車線の有無といった道路条件
- ②都市部や山間部、ジオフェンスの設定などの地理条件
- ③天候や夜間制限などの環境条件
- ④速度制限やインフラ協調の有無、保安要員の乗車要否といったその他の条件
【参考】関連記事としては「自動運転とODD」も参照。
自動運転システムの安全性
設定されたODDの範囲内にあるかどうかを確実に認識し、ODD内でのみ自動運転システムが作動するものであることや、制御系やセンサー系の冗長性を確保することでシステムの安全性を確保することが可能であることなどを求めている。
MRMやHMIなども
また、レベル3に対しては、運転権限の委譲に伴うフォールバック(縮退運転)やミニマル・リスク・マヌーバー(MRM)などの機能を、レベル4においても自動運転が継続困難となった際にMRMが設定されていることを求めている。
このほか、ヒューマン・マシン・インターフェース(HMI)やデータ記録装置、サイバーセキュリティ、無人自動運転移動サービスに用いられる車両の安全性、安全性評価などにも言及している。
【参考】安全技術ガイドラインについては「国土交通省、自動運転レベル3とレベル4に関する安全技術ガイドライン作成」も参照。
自動運転AIの"怪異"挙動に備え、車内を遠隔監視せよ…国交省、レベル4車両向けの安全ガイドラインで提言 自動車事故予防へ厳しく義務付け|自動運転ラボ https://t.co/niuf39DS0R @jidountenlab #国土交通省 #怪異 #監視
— 自動運転ラボ (@jidountenlab) September 24, 2018
■自動運転の公道実証実験に係る道路使用許可基準
自動走行システムの公道実証実験のためのガイドライン
適正かつ安全な自動運転の公道実証実験の実施を推進するため、警察庁が2016年5月に発表した。
▼自動走行システムに関する公道実証実験のためのガイドライン
https://www.npa.go.jp/koutsuu/kikaku/gaideline.pdf
現行法上、道路運送車両の保安基準を満たし、運転者が実験車両の運転者席に乗車して周囲の状況などを監視し、安全確保に必要な操作を行うことができれば公道実証実験は可能で、こうした実証時の安全確保措置やテストドライバーの要件、実験車両に係る各種データの記録や保存、事故の際の措置などについて義務や指針がまとめられている。
テストドライバーには、実証中に交通事故や交通違反が発生した際に運転者として責任を負うことになるためその自覚・認識を持つことをはじめ、自動走行システムの仕組みや特性への理解や緊急時操作の習熟などを求めている。
また、実施主体は、実証中に発生した交通事故や交通違反の事後検証を行うことができるよう、車両にドライブレコーダーやイベントデータレコーダーを搭載すべきとしている。
遠隔型システムの公道実証実験許可基準
レベル4においては遠隔型の自動運転技術の実証が求められることから、警察庁が遠隔型自動運転システムの公道実証実験に係る道路使用許可の申請に対する取扱いの基準を2017年6月に策定・発表した。
▼遠隔型自動運転システムの公道実証実験に係る道路使用許可の申請に対する取扱いの基準
https://www.npa.go.jp/laws/notification/koutuu/kouki/290601koukih92.pdf
正式に遠隔型自動運転も道路使用許可を受けて実施可能な許可対象行為とし、その取扱い基準を定めたものだ。なお、これに先立ち、国土交通省が同年2月に道路運送車両の保安基準に関する告示を改正し、車両内の運転者による操作を必要としない自動運転システムの公道実証実験を可能とする措置を講じている。
取扱い基準では、通信の遅延が生じ得ることや遠隔監視・操作者が把握できる周囲の状況が限定され得ることを踏まえた安全対策を盛り込んだ実施計画を求めているほか、遠隔監視・操作者が映像や音によって通常の運転と同程度に実験車両の周囲や進行方向の状況を把握できること、通信遅延が生じた際は自動的に実験車両が安全に停止すること、警察官など同乗のもと事前に走行審査を行うことなどを定めている。
ハンドルのない特別装置自動車も明記
2019年9月には、通常のハンドル・ブレーキと異なる特別な装置で操作する自動車(特別装置自動車)に関する取扱いを新たに盛り込んだ道路使用許可基準も発表している。
遠隔型、及び特別装置自動車については、安全確保の一環として当面は原則時速20キロを超えない速度を目安に最高速度として実施計画に盛り込むこととしていたが、2020年9月発表の最新版「自動運転の公道実証実験に係る道路使用許可基準」においては、十分な猶予をもって安全に停止できる速度とし、通常の自動車の停止距離と同等の距離で停止することができる速度以下とするなど、部分的に改訂している。
自動配送ロボット(近接監視・操作型及び遠隔監視・操作型)公道実証実験手順
新型コロナウイルスの影響でさまざまな行動・サービスのコンタクトレス化を求める声が強まり、自動運転技術を活用した配送ロボットの開発を促進する機運が高まったことを受け、2020年4月に警察庁が宅配用ロボットなどに関わる公道実証の手順を発表した。
▼自動配送ロボット(近接監視・操作型及び遠隔監視・操作型)公道実証実験手順
https://www.npa.go.jp/bureau/traffic/selfdriving/202009robotjikkentejun.pdf
配送・宅配ロボットにおいても自動運転の公道実証実験に係る道路使用許可基準を踏まえて実験計画案を作成することとし、近接監視・操作型の場合は監視・操作者が常に実験で使用するロボットの近傍で監視・操作することや、遠隔監視・操作型の場合は遠隔監視・操作者が映像や音によって実験車両の周囲や進行方向の状況を把握すること、実験車両が歩道などを通行する場合は、「搭乗型移動支援ロボットの公道実証実験に係る道路使用許可の取扱いに関する基準」も踏まえることとしている。
【参考】公道実証実験に係る道路使用許可基準については「日本の警察は「自動運転」にどう向き合っている?」も参照。
日本の警察は「自動運転」にどう向き合っている?実証ガイドライン作成や道交法改正… https://t.co/AkoT539tN4 @jidountenlab #自動運転 #警察 #日本 #取り組み
— 自動運転ラボ (@jidountenlab) March 9, 2020
■ラストマイル自動運転車両システムのガイドライン
ODD具体例を提示
移動サービスに用いられるラストマイル自動運転車両の開発や実用化、普及を促進するため、国土交通省が2020年7月に「ラストマイル自動運転車両システム基本設計書」を策定・発表した。
▼ラストマイル自動運転車両システム基本設計書
https://www.mlit.go.jp/report/press/content/001354517.pdf
自動運転移動サービスの走行環境を具体例としてまとめるとともに、安全基準への適合性確保に向け設計時に留意すべきポイントを規定している。
基本設計書では、ラストマイル自動運転を以下のように定義づけている。
- ①自動運行装置搭載車両
- ②ワンマイル程度の狭く限定された移動範囲を前提としたODD
- ③主に物流や移動サービス、地域公共交通に用いられる
ラストマイル自動運転が共通して考慮すべきODDには、道路条件・地理条件、環境条件、走行条件、機能的走行空間を挙げ、個別具体的なODDとしては、自転車歩行者専用道のうちラストマイル自動運転車両が特別に通行できる道路や、自転車歩行者専用道内に事前に設定された走行経路などの例を挙げている。
外向きのHMIで周囲と情報共有
技術的要件としては、設計時の留意点として縦方向や横方向の車両運動制御、歩行者や自転車への対応、緊急車両への対応などのほか、周囲の交通参加者に自動運転車であることが明確となるよう外向きのHMIによって車両挙動に関連する情報提示をすることが望ましいとしている。
また、障害物への対応や制動時の減速度、自動運行装置の冗長性、サイバーセキュリティシステムに係る技術要件やプログラムなど改変装置に係る技術要件に適合することなども挙げている。
【参考】ラストマイル自動運転向けのガイドラインについては「【資料解説】ラストマイル自動運転車両システムのガイドライン、国交省が策定」も参照。
【資料解説】ラストマイル自動運転車両システムのガイドライン、国交省が策定 https://t.co/jZgC8ZO4oy @jidountenlab #自動運転 #ラストマイル #資料解説
— 自動運転ラボ (@jidountenlab) July 23, 2020
■限定地域での無人自動運転移動サービスにおいて旅客自動車運送事業者が安全性・利便性を確保するためのガイドライン
従来の有人業務を無人で行う仕組みが必要
限定地域におけるレベル4移動サービスにおいては、サービスを実施する旅客自動車運送事業者は運転者が車内にいる場合と同等の安全性及び利便性を確保することが求められる。このため、国土交通省は2019年6月、安全確保に向け対応・検討すべき事項における基本的な考え方として「限定地域での無人自動運転移動サービスにおいて旅客自動車運送事業者が安全性・利便性を確保するためのガイドライン」を発表した。
▼限定地域での無人自動運転移動サービスにおいて旅客自動車運送事業者が安全性・利便性を確保するためのガイドライン
https://www.mlit.go.jp/common/001295527.pdf
旅客自動車運送事業者、遠隔監視・操作者、運転者以外の乗務員のそれぞれにおける基本的な考え方を示すとともに、安全性・利便性の確保のために対応すべき事項として、運行を中断したときや事故によって旅客らが死傷したとき、天災などにより輸送の安全の確保に支障が生ずるおそれがあるとき、車両の重大な故障を発見したときなど、非常時の対応や連絡体制の整備などを挙げている。
このほか、運転者が運送実施のために行う運行情報の入力や運行中における車両位置の把握、回送板の掲出、早発の禁止、運賃及び料金の払戻しといった行為について、無人自動運転移動サービスにおいても行うことができるようにすることが必要としている。
【参考】限定地域における自動運転サービスガイドラインについては「ついに実現へ!レベル4の自動運転タクシー、限定地域での運行ガイドライン発表」も参照。
ついに実現へ!レベル4の自動運転タクシー、ガイドライン発表 限定地域での運行について記載 https://t.co/gqtCilaDow @jidountenlab #自動運転 #タクシー #ガイドライン
— 自動運転ラボ (@jidountenlab) July 4, 2019
■農業機械の自動走行に関する安全性確保ガイドライン
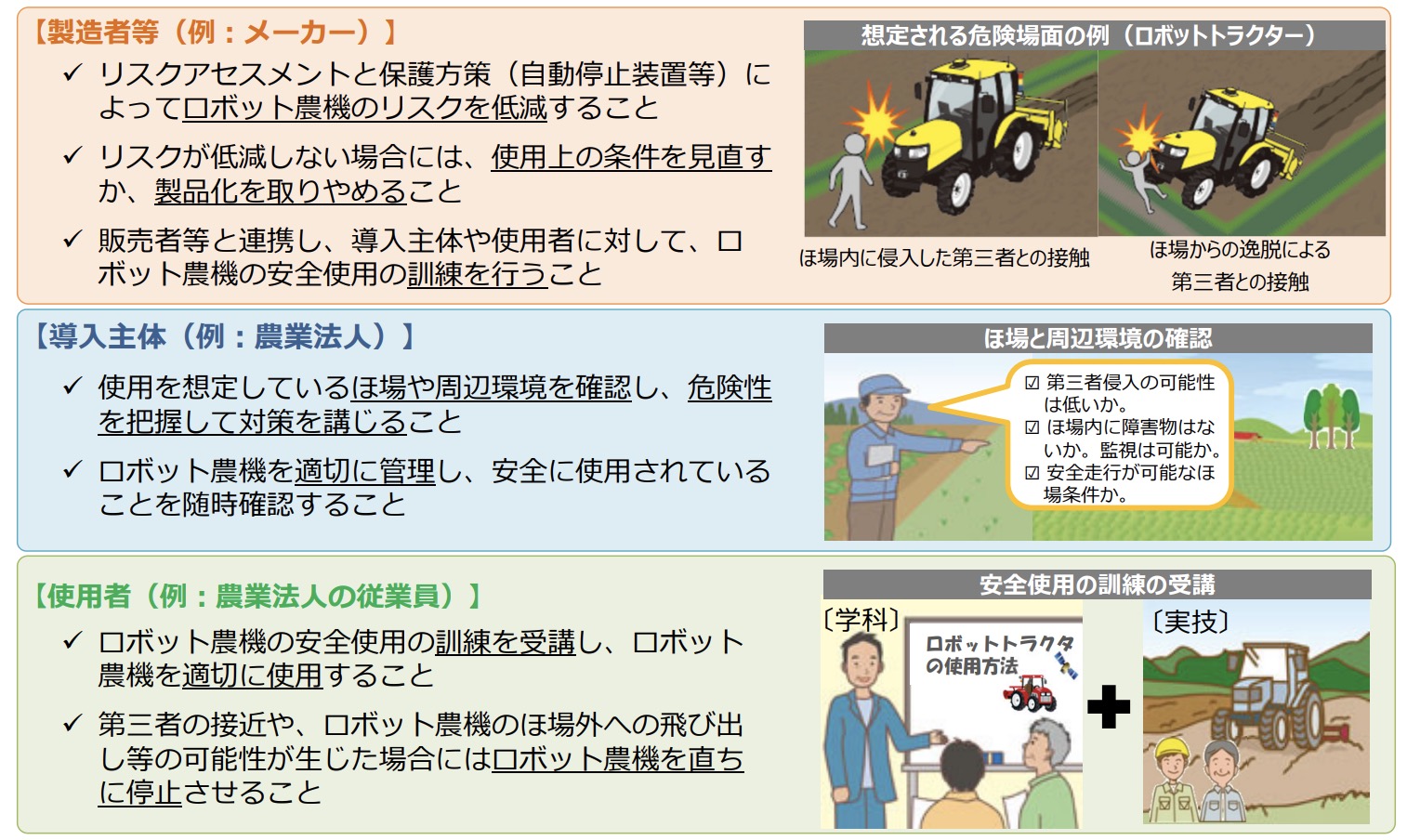
農林水産省は2017年3⽉末に農林⽔産省⽣産局⻑通知として「農業機械の⾃動⾛⾏に関する安全性確保ガイドライン」を示し、その内容の一部改正について2023年3月に発表している。
このガイドラインはロボット農機の安全性確保を⽬的としたもので、リスクアセスメントの実施といった安全性確保の原則や、関係者の役割などについての指針などについて示されている。ちなみにロボット農機については「ロボット技術を組み込んで⾃動的に⾛⾏⼜は作業を⾏う⾞両系の農業機械」と定義されている。
対象の農機としては、以下の6つが挙げられている。
- ロボットトラクター(衛星測位情報を利⽤して⾃動⾛⾏するトラクター)
- 茶園管理ロボット(⾃動⾛⾏する茶園管理⽤農業機械)
- ロボット⽥植機(衛星測位情報を利⽤して⾃動⾛⾏する⽥植機)
- ロボット草刈機(衛星測位情報を利⽤して⾃動⾛⾏する草刈機)
- ロボット⼩型汎⽤台⾞(衛星測位情報を利⽤して⾃動⾛⾏する⼩型汎⽤台⾞)
- ロボットコンバイン(衛星測位情報を利⽤して⾃動⾛⾏するコンバイン)
▼農業機械の自動走行に関する安全性確保ガイドラインの概要
https://www.maff.go.jp/j/press/nousan/gizyutu/230329.html
▼農業機械の⾃動⾛⾏に関する安全性確保ガイドライン
https://www.maff.go.jp/j/press/nousan/gizyutu/attach/pdf/230329-2.pdf
■海外各国の法律・ルール
アメリカ:トランプ政権下でついに連邦政府が動く?
米国では、車両の保安基準「FMVSS(連邦自動車安全基準)」を運輸省道路交通安全局(NHTSA)が管轄しているものの、道路交通法や民放などは州法で運用されており、自動運転に関する規制は原則各州が個別に定めている。
連邦政府としては、自動運転車の安全確保に関する連邦法「車両の進化における生命の安全確保と将来的な導入および調査に関する法律(SELF DRIVE Act)」や、これに変更を加えた法案「AV START Act」などが審議されてきたが、上院を通過することができず未だ取りまとめることはできていない。
ただ、NHTSAによる安全ガイドラインの発行や事故報告の義務付け、FMVSSに自動運転システム搭載車両を新たに位置付け、ハンドルなどの手動制御機能を備えない車両に義務付けられるべき安全基準を明らかにするなど、一定の対策を行っている。
バイデン政権下では大きな進展が見られなかったものの、トランプ新政権ではさまざまな改正に注目が集まる。トランプ氏はもともと自動運転に消極的だったが、選挙戦を強力に支援したEV大手テスラのイーロン・マスク氏への配慮か、連邦政府として自動運転に関する規制緩和を行う方針が報じられている。
事故報告義務の緩和がすでに発表されているほか、各メディアによると、米国で製造された自動運転車について、保安基準上の緩和対象にすることも明らかにされたようだ。これまで、ハンドルなどを備えない自動運転車は輸入車のみ保安基準の免除が適用されていたという。
細かい改正は今後も続きそうだが、焦点は自動運転車の国家レベルの認証基準の策定だ。各州共通の自動運転認証基準や公道走行ルールが策定されれば、米国内における自動運転社会は大きく変わる。
これまで州ごとに個別の認可を受けていた車両は、全州まとめて認可を受けることが可能になるかもしれず、州をまたぐ自律走行もハードルがぐっと下がる。広域展開を目指すWaymoや、レベル5確立を掲げるテスラなどにとって非常に望ましい改正となりそうだ。
【参考】米国の動向については「アメリカの自動運転最新事情」も参照。
各州においては、自動運転導入積極派と消極派に二分されるが、多くは積極派寄りのようだ。自州の産業振興策や将来的な道路交通安全の向上を視野に、企業誘致を図る動きも少なくない。積極派代表格としては、カリフォルニア州、アリゾナ州、テキサス州が挙げられる。
一例として、カリフォルニア州における取り扱いを紹介する。同州では、州道路管理局(DMV)が道路に関するすべての運行規制を所管し、州公益事業委員会(CPUC)がタクシーサービスなどの規制権限を有する。
DMVは2015年に自動運転車による公道実証を可能にする規則案を公表したのを皮切りに、改訂を経て2018年には無人運転実証と展開を含む網羅的な最終規制パッケージを行政法局に提出し、承認を得た。つまり、無人実証が可能になったのは2018年からで、それまではドライバーが必ず同乗していなければならなかった。
同州においては、無人の自動運転はハードウェアとソフトウェアを組み合わせた技術で動的運転タスクを実行する車両の操作状態を指し、人間が積極的に監視するか否かは問わない。常時監視や能動的監視がなければ継続実行できない車両は含まれない。
開発事業者は、すでにテストを実施していること、州に許可されたテストドライバーによって運転されていること、保険により損害賠償する能力を有すること、500万ドルの保証を有することなどが求められる。また、各車両の車種や年式、ナンバーなどの識別情報を書面で当局に提出しなければならない。許可の有効期間は2年で、都度更新していく。走行においては、衝突や自動運転モードが解除された案件について報告義務が課されている。
同州において2025年5月現在、有人による自動運転実証ライセンスは31社、無人運行ライセンスは、Waymo、Apollo(百度)、AutoX、WeRide、Zoox、Nuroの6社が許可を得ている。
自動運転車両で乗客輸送し、乗車料金を請求するサービス向けのプログラム「Autonomous Vehicle Deployment (AVD) Program」には、WaymoとNuro、メルセデス・ベンツの3社が参加している。無人、有人の2種類が用意されており、各社ともCPUCからサービス許可を取得している。
【参考】トランプ政権の動向については「トランプ氏、自動運転車の「事故報告義務」撤廃へ テスラに”恩返し”か」も参照。
中国:レベル3の導入間近、自動運転条例制定する動きも
中国も米国の運用形態に近く、基本的には北京などの各市が開発事業者らに条件を付し、ライセンスを提供する形で自動運転走行・サービスを実現している。ただ、その背景には中国政府の指示がしっかりと存在している。
国としては、同国工業情報化部が2017年に「コネクテッド車ネットワーク構築の国家基準」、2018年に「知能自動車路上試験の国家標準」を発表するなど、公道実証に向けた技術要件を示している。各市は、国が発するこうした指針に基づいて独自に実証を促している格好だ。
2023年に交通運輸部が発表した「自動運転車両等輸送安全サービスガイドライン(試行版)」では、自動運転サービスの応用シナリオや対象となる交通事業者、輸送車両、人員配置、安全な生産体制や輸送の安全性の保証、緊急時の対応、情報のフィードバックなどに関する指針が示された。レベル3以上を対象にしたものだ。
動ガイドラインによると、自動運転バスは当面車内に保安要員を同乗させることが求められている。ドライバーの有無は問われていない。自動運転タクシーは、保安要員を同乗させるか、あるいはリアルタイムで遠隔監視する係員を配置することが求められている。1人の係員は最大3台まで監視することができるようだ。
このガイドラインに基づき、自動運転走行のテストを希望する企業9社に対し2024年6月までにレベル3の公道実証が認可された。第一汽車(FAW)や広州汽車(GAC)、上海汽車(SAIC)といった既存メーカーから、NIOやBYDなどのEVメーカーも含まれている。
道路交通法の抜本的な改正はまだ行われていないようだが、試験運用の結果次第では中国全土が大きく動いていくことになるかもしれず、今後の動向を注視したい。
各市の取り組みとしては、多くの場合、自動運転能力を試すテストコースを用意し、車両の性能を試験する。その上で、ドライバー付き、ドライバーレス、営業ライセンスなど申請のあったライセンスを事業者に付与する。
走行エリアも各市が独自に決めており、事業者がどこでも自由に走行できるわけではない。ただ、各市は競争するかのようにエリア拡大を随時図っており、自動運転導入に積極姿勢を示している。
北京市は同国内初となる「北京市自動運転車条例」を2024年12月に発表した。サービス車両のほか自家用車も対象にレベル3以上の技術導入を支援する方針で、インフラ協調システムの設置や走行可能エリアの拡大などを図っていくようだ。同条例は2025年4月に施行されている。
【参考】中国の動向については「株価93%下落の中国NIO、「自動運転レベル3」の試験許可を取得」も参照。
ドイツ:世界に先駆けてレベル3やレベル4を法規定
ドイツは、国家レベルで明確に自動運転開発・運用を視野に収めた法を制定済みの先進国だ。
道国連邦政府は2017年、世界に先駆けてレベル3走行に関する規定を盛り込んだ改正道路交通法を成立させた。アウディがこの動きと連動するかのように世界初と言われた量産車向けのレベル3システム「Audi AIトラフィックジャムパイロット」を発表したが、結局実装されることはなく、ホンダに世界初の座を譲る格好となった。
それでも連邦政府は手を止めることなく議論を続け、2021年にはレベル4サービスを想定した改正道交法を成立させた。正式名称は「道路交通法及び強制保険法改正のための法律―自動運転法」で、自動運転車両の技術的要件や、所有者や開発事業者など自動運転に関わる者が負うべき義務などが盛り込まれている。
自自動運転車による公道走行は、技術要件を満たすこと、運行許可が付与されていること、公共道路交通で利用することが許可されていることなどを条件とする。
2022 年には、自動運転車の型式認証の要件などを規定した規則「自律走行機能を備えた車両の認可並びに定義された運転エリアにおける自律走行機能を備えた車両の運転に関する規則(自律走行車両の認可及び運転)」(AFGBV)も成立した。
自動運転システムを備えた車両とその車両の運転、公道使用するための登録に際して必要な型式認定や、運転エリアの承認、車両の道路通行のための登録などについて定められているという。
型式認証に関しては、車両の周りの他の道路利用者や関わりのない第三者、動物や所有物を検出することや、それに基づくリスク評価により、検出した他の道路利用者などの行動や動きを評価し、移動中の車両が10メートル毎秒以下で減速できると想定したうえでその後の行動や動きを予測すること、そして、リスク評価の結果に基づき運転操作を行えることが求められている。
責任・賠償関連では、2017年の改正時に強制保険の最低保険金額や自動運転車の保有者に対する付保義務などが定められた。2021年改正時には、レベル4サービスにおける遠隔監視技術監督者に対する車両保有者の付保義務も導入されている。
自動運転車の欠陥に起因する損害に対しては、製造物責任法に基づき自動車メーカーやサプライヤーらが製品の欠陥に対し責任を負う。
【参考】ドイツの動向については「ドイツの「自動運転法」解説」も参照。
英国:2026年までに自動運転法施行予定
英国では2024年5月、自動運転車を展開するための包括的枠組みとなる自動運転法が制定された。2026 年までに施行される見込みとしている。
同法によると、自動運転による走行は認可制で、公道走行するためには「自動運転試験」に合格する必要がある。車両の機能が自律走行を可能にすることを意図して設計されており、実際に自律走行を安全かつ合法的に行うことが求められる。
全工程を自動運転走行する車両(NUiC 車/no-user-in-charge)の運行事業にも免許制を設け、運行中に発生した問題の発見や対応に全般的な責任を負うこととしている。免許の取得には、評判や財務状況などの要件を満たす必要があるという。
旅客運送サービスも認可制とし、認可に基づきサービスを提供できる地域や車両に関して、タクシーやハイヤー、バスに関する規制が適用されないことなどに関する規定が盛り込まれている。
自動運転車両の型式認定制度については、既存の法令を自動化車両に適合させるための改正権限を国務大臣に付与するほか、路上での車両検査に関する規定を認可済自動運転車両に適合させるための改正規定、自動運転車両が活用できるようにするための交通規制情報のデジタル形式による提供義務についての規定が設けられている。
フランス:レベル3法は制定済み
フランスでは、仏政府が2021年に道路交通法を改正し、翌2022年からレベル3走行が可能になった。自動運転が使用条件に従い正常に作動している際の運転者の責任を免除し、自動車メーカーの責任とする規定や、高速道路など中央分離帯のある道路で時速60キロを限度とする規定などが盛り込まれている。
レベル4を盛り込んだ法律は今のところ制定されていないものと思われるが、同国の開発事業者EasyMileが2021年11月までにフランスにおいてレベル4走行の許可を取得したと発表している。おそらく、前述したレベル3認可か、特別措置によるものと思われる。
■【まとめ】今後数年以内に各国の足並み整う?
国家単位の法整備面では、ドイツと日本が世界をリードしている。一方、実用化面で先行する米国・中国は、州や市が中心となって自動運転導入を推進している格好だ。
英国など他国でも法整備に進展が見られており、今後数年以内に多くの国が足並みをそろえる可能性が考えられる。
次のフェーズでは、開発・運用企業の誘致合戦が始まるかもしれない。あるいは、開発企業による売込みが本格化するかもしれない。
自動運転大国に向け、自動運転の導入しやすさや受け入れ体制が今以上に問われる時代となりそうだ。
【参考】関連記事としては「自動運転、日本でのレベル4初認可は「誘導型」 米中勢に遅れ」も参照。
■関連FAQ
日本においては主に「道路交通法」「道路運送車両法」「道路法」だ。
国土交通省が策定した「自動運転車の安全技術ガイドライン」や「ラストマイル自動運転車両システム基本設計書」、警察庁が策定した「自動走行システムの公道実証実験のためのガイドライン」などがある。
市販されているホンダのレベル3搭載車「新型LEGEND」は、税込価格が1,100万円。新型LEGENDのように市販されている車両はまだ少ないが、例えばスウェーデンのEinrideの場合、月額制で利用できる自動運転トラックの推定月額料金を18,000~22,500ドルとしている。
2022年4月に道路交通法の改正案が国会で成立した。海外ではドイツがレベル4に対応するため、道交法を改正済みだ。
Google系の米Waymoは2019年、車内に安全要員を乗せない自動運転タクシーの商用サービスを開始し、特定エリアにおける完全自動運転が可能な「自動運転レベル4」が実現した。自動運転レベル3に関しては、ホンダがレベル3の機能を搭載した「新型LEGEND」を2021年に発売し、渋滞時の高速道路で自動運転が可能になっている。
(初稿公開日:2020年12月28日/最終更新日:2025年5月22日)
【参考】関連記事としては「自動運転、どこまで進んでいる?(2023年最新版)」も参照。

とは?搭載する自動車の車種は?自動運転ではない?")



」を解説!【トヨタ&KINTO】マイカーをアップグレード")

の意味・読み方は?自動車業界の新潮流を示す")
・自動運転ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル・スズキ】欧米車種も")

