


自動運転レベル4の自動運転サービスやレベル3の自家用車の社会実装が国内外で本格化し、開発競争やービス競争が一段と激化している。自動運転時代の到来だ。
配車プラットフォームやLiDARをはじめとした各種センサーなど、そのビジネス領域も拡大の一途をたどっており、要素技術の一つに数えられる高精度3次元地図・ダイナミックマップも例外なく市場が盛り上がっているようだ。
高精度3次元地図・ダイナミックマップは従来の地図情報と何が違うのか。ダイナミックマップについて理解するために必要な基礎知識のほか、自動運転においてなぜ必要とされているのかなど、その概要や最新情報を見ていこう。
・2026年6月18日:関連FAQを追加。
・2026年5月1日:ダイナミックマップでよく使われるワードを列挙して解説。
・2025年5月21日:ダイナミックマッププラットフォームの取り組みを更新
・2024年3月19日:各社の事業内容を追記
・2018年9月23日:記事初稿を公開
記事の目次
■ダイナミックマップとは?
官民ITS構想・ロードマップ2016では、ダイナミックマップについて「道路及びその周辺に係る自車両の位置が車線レベルで特定できる高精度三次元地理空間情報(基盤的地図情報)及び、その上に自動走行などをサポートするために必要な各種の付加的地図情報(例えば、速度制限など静的情報に加え、事故・工事情報など動的情報を含めた交通規制情報など)を載せたもの」と定義している。
高精度3次元地図に車両やさまざまな交通情報を付加したデータベース的マップで、情報の更新頻度に応じて静的情報、準(准)静的情報、準(准)動的情報、動的情報の4層に分類した情報が統合されている。刻々と状況が変わる道路情報をリアルタイムで活用することが可能なデジタルインフラやデータベースとなる。
| 情報の種類 | 情報の内容 |
| 動的情報 | 周辺車両や歩行者情報など |
| 準(准)動的情報 | 事故情報や渋滞情報など |
| 準(准)静的情報 | 交通規制や道路工事の予定情報など |
| 静的情報 | 路面情報や車線情報など(=高精度3次元地図情報) |
▼ダイナミックマップの概念/定義および、SIP-adusにおける取り組みに関する報告|第30回 SIP自動走行システム推進委員会 資料
https://www8.cao.go.jp/cstp/gaiyo/sip/iinkai/jidousoukou_30/siryo30-2-1-1.pdf

■ダイナミックマップの構成要素
高精度3次元地図
従来の平面的な地図情報に対し、各車線やガードレール、道路標識、横断歩道などさまざまな情報をより正確な位置で記録した空間的な地図。HDマップとも言い、ダイナミックマップの基盤となる部分である。高精度3次元地図とダイナミックマップが混同して理解されているケースもあるが、高精度3次元地図は基本的には「静的情報」のみを扱い、動的情報は含まれない。
自車位置の特定に用いられている従来のGPSによる測位情報は、測位不能なケースや誤差が数十メートルに及ぶケースなどがあるが、自動運転において多大な誤差は大きな事故を招く一因となる。
そこで、2018年11月にサービスが開始される準天頂衛星システム「みちびき」の高精度測位サービスを活用することで、自車位置の誤差を数センチメートル級まで抑えることが可能になるが、これと同時に地図情報も限りなく誤差の少ない高精度なものとなる必要があり、さらに自動運転で必要とされるさまざまな情報を付加することで、より精度の高い自動運転が可能となる。
高精度3次元地図はカメラ、レーザースキャナーなどの3次元計測器、GPSなどの衛星測位機器などで構成されるMMS(Mobile Mapping System)という計測システムを用いて構築される。このシステムを搭載した車両を走行させることで、道路の形状といった路面情報や、車線情報、標識などの道路の周辺環境を、効率的に3次元データとして取得することが可能となる。
立体的な3次元データは、高速道路とその高架下の一般道の識別や立体交差の識別などのために、高さの情報を含む周辺環境のデータを取得することが可能で、これも自動運転には欠かせない情報となる。
【参考】みちびきについては「国産衛星みちびき、自動運転の誤差を10cm以下に 2018年11月に活用スタート|自動運転ラボ」も参照。
静的情報
道路や道路上の構造物、車線情報、路面情報、恒久的な規制情報など、1カ月以内の更新頻度が求められる情報。いわばダイナミックマップのベースとなる地図情報。これらの情報はいわゆる「高精度3次元地図」などと表現されるケースが多い。
準静的情報(准静的情報)
道路工事やイベントなどによる交通規制情報、広域気象情報、渋滞予測など、1時間以内での更新頻度が求められる情報。
準動的情報(准動的情報)
観測時点における実際の渋滞状況や一時的な走行規制、落下物や故障者など一時的な走行障害状況、実際の事故状態、狭域気象情報など、1分以内での更新頻度が求められる情報。
動的情報
移動体間で発信・交換される情報や信号現示情報、交差点内歩行者・自転車情報、交差点直進車情報など、1秒単位での更新頻度が求められる情報。
協調領域と競争領域
高精度3次元地図データを活用する上で、協調・競争領域を設けることにより、地図情報を効率的に提供することが可能となる。自動車会社などが共通して利用する地図データを協調領域として提供し、各社はそこに独自情報を追加するなど加工して付加価値をつけることで、新たな商品やサービスを生み出すことが可能になる。
詳しくは後述するが、日本の自動車メーカー各社が参画する「ダイナミックマップ基盤」という企業は、この協調領域を手がける企業と理解してほしい。
▼ダイナミックマップ基盤株式会社 現状の取組と今後の展開
https://www.sip-adus.go.jp/evt/workshop2020/file/dm/06DM_02J_Inahata.pdf
■ダイナミックマップの必要性
ダイナミックマップの高精度3次元地図と、全球測位衛星システム(GNSS)や車載センサーから得られるデータを照らし合わせることで、自車位置と周辺環境の把握をより正確に行うことができる。また、ダイナミックマップの動的情報をもとに、周辺車両などの挙動を推測することで、見通しの悪い交差点などのセンサーの死角を補い、高い安全性を確保することも可能となる。
ADAS(先進運転支援システム)を搭載する自動運転レベル2(部分運転自動化)においては、車両はカメラなどの車載センサーをもとに車両単体で周辺環境認識を行っているが、半自動運転となる自動運転レベル3(条件付き運転自動化)や完全自動運転車となる自動運転レベル4以上の車両においては、車両単体ではなく各種インフラと協調することでその信頼性を高める必要があり、ダイナミックマップは情報インフラとしてその役割を果たすことになる。
■ダイナミックマップセンターに求められる機能
ダイナミックマップは一度完成すれば永遠に使えるものではなく、随時更新し管理する必要がある。そのため、ダイナミックマップの運用にはデータを取り扱うセンターのような組織が必要で、以下の機能が求められる。
MMS計測データ入力機能
走行しながら建物や道路の形状、標識、ガードレール、マンホールなどの3次元位置情報を取得する移動式高精度3次元計測システムMMSを搭載した車両からデータを取得し、入力・保存する。
生成機能
MMS計測データから高精度3次元地図を作成する。また、公共情報やプローブ情報から、準静的情報・準動的情報を生成する。
データベース管理機能
データベースに高精度3次元地図や準静的情報、準動的情報を登録・変更・削除する。
高精度3次元地図配信機能
提供用の高精度3次元地図ファイルを作成し配信する。
差分検出・更新判定機能
MMS計測データや公的情報、プローブ情報から高精度3次元地図の差分や更新カ所を検出する。
公共情報入力機能
公共機関から道路交通情報などの公共情報を入力・収集する。
セキュリティ機能
ユーザー認証、データの暗号化、通信の暗号化など機能を実現する。
品質管理機能
高精度3次元地図や準静的情報、準動的情報の品質確認、管理を行う。
■ダイナミックマップでよく使われるワード
以下はダイナミックマップに関してよく使われる専門用語だ。
- GNSS(Global Navigation Satellite System)
衛星測位システムの総称であり、人工衛星からの信号を用いて位置・速度・時刻を高精度に測定する技術。 - GSE(Ground Support Equipment)
空港などにおけるグランドハンドリング作業で使用される各種器材の総称。 - GSE通行路
グランドハンドリング作業で使用される車両が走行するための専用通路。 - LiDAR(Light Detection and Ranging)
近赤外光や可視光、紫外線などを対象物に照射し、その反射光をセンサーで捉えることで距離を測定するリモートセンシング技術。 - モービルマッピングシステム(MMS)
LiDARなどのセンサーを搭載した計測車両により、移動しながら道路や周辺の地物を高精度に計測するシステム。 - 地物
空間データの基本単位であり、道路や河川のような物理的対象だけでなく、行政界や地名などの非物理的要素も含め、地図上に表現されるあらゆる対象を抽象化した概念。 - 点群データ(3次元点群データ)
X・Y・Zの三次元座標と色情報を持つ多数の点で構成されるデータであり、現実空間の形状を高精度に再現するために用いられる。 - 衛星不可視エリア
GNSS信号が遮蔽されることで測位精度が低下し、自己位置の特定が困難となるエリア。 - 自己位置推定
自律移動モビリティがセンサー情報などを用いて、自身の現在位置を地図上で推定する技術であり、安全かつ正確な自律移動の基盤となる重要要素。
■ダイナミックマップをめぐる国際的な動き
ダイナミックマップの基盤となる高精度3次元地図の整備が各国で進められているが、ここで重要となるのが国際規格だ。各国の高精度3次元地図の規格が大きく異なると、自動運転車の輸出入の障害となりかねない。
日本では高速道路のマッピングが完了し、ハンズオフ運転を可能とする自動運転レベル2や条件付きで自動運転を可能とするレベル3搭載車両がすでに高精度3次元地図を活用している。ホンダの新型レジェンドが代表だ。
今のところレジェンドは国内の高速道路のみを対象としているが、将来輸出する場合を想定してほしい。例えばEU圏に輸出し、そのエリアでレベル3を実現するケースだ。当該エリアの高精度3次元地図が必要となるが、この輸出先で用意されている高精度3次元地図の仕様が日本版と大きく異なる場合、レジェンドはレベル3を発揮することができない。あるいは、その別仕様の地図に対応するため、自動運転システムをプログラムし直さなくてはならない。
この手間は、業界全体の損失と言えるほど無駄な労力となる。高精度3次元地図は共有すべき情報インフラとして、各国の事業者が一定規格のもと作製することが重要となる。自動車メーカーは、この一定規格に従った開発を進めることでグローバルな展開を図りやすくなる。
こうした国際規格「ISO 14296(協調ITSにおける地図データベース仕様の拡張)」は、日本主導のもと2016年に発行されている。ダイナミックマップにおける静的情報、つまり高精度3次元地図に関し国際標準化を図る取り組みだ。
具体的に何をどこまで標準化したものかは分からないが、用語や記号の定義などをはじめ、アプリケーションや機能要件、論理データモデルなどについて細かく定められているようだ。ダイナミックマップにおいても同様に国際標準化活動が進められている模様だ。
■ダイナミックマップの自動運転以外への応用
ダイナミックマップや高精度3次元地図は、そのノウハウを活用することで駐車場や工場内などにおける自動運転や歩道における自動走行ロボットの実用化などにも役立てることができる。また、用途を自動運転のみに限定することなく、道路交通を網羅する情報インフラとして幅広い活用が望まれる。
動的情報などを紐づけるシステムは、走行中の自動車が生成するさまざまなデータをビッグデータ化し、渋滞や交通事故をはじめとした交通課題に対応する交通政策の立案に寄与する。防災対策や災害時の対応などにも役立てられるほか、交通流をもとに商業や観光振興などの分野で活用することもできそうだ。
道路上の変化を抽出する技術は、膨大な労力を要する道路インフラの管理面で役立てることも可能だ。
すでに自動運転から派生した地理系データの活用を促進する動きも出ている。NTTデータは2021年4月、交通環境情報ポータルサイト「MD communet」の一般公開を開始した。
戦略的イノベーション創造プログラム(SIP)第2期における地理系データの流通促進に係る取り組みの中で作製したもので、モビリティ分野の多種多様な交通環境情報の所有者と、こうした情報をもとにビジネス活用を目指す利用者のビジネスマッチングを支援し、新たなビジネス創出を促進するポータルサイトと位置付けている。
MaaSや自動運転、物流、気象など散在するモビリティ分野の各種交通環境情報を、市場に流通しているデータをはじめ、市場に出ていない国や企業が保有するデータなどの特徴的なデータに至るまでカタログ情報として集約し、交通環境情報のニーズ・シーズのマッチングを促進する。
ユースケースとしては、物流事業者向けナビアプリの開発や、生活動線と観光動線が混在する観光都市部における課題解決、緊急車両の効果的な出動支援、建設車両の運行管理、案内ルートの付加情報表示による利用者行動支援などが挙げられている。
【参考】MD communetについては「MD communet、交通関連データ5,000件超を検索可 自動運転やMaaS開発に有用」も参照。
MD communet、交通関連データ5,000件超を検索可 自動運転やMaaS開発に有用 https://t.co/AMWSYLI8Sa @jidountenlab #自動運転 #MaaS #交通 #データ
— 自動運転ラボ (@jidountenlab) May 12, 2021
■ダイナミックマップの開発状況
日本国内の高精度3次元地図は、国策のもと民間各社が結集して設立した「ダイナミックマップ基盤(DMP)」が開発・整備を進めている。すでにハンズオフ運転を可能にする日産のADAS「ProPILOT2.0」や、レベル2、レベル3を実現するホンダの「Honda SENSING Elite」で採用されている。
DMPは今後、現在のデータを維持しつつも新たな価値と優れたコストパフォーマンスを備えた次世代の高精度3次元地図データを2023年度から導入する方針で、これに合わせて対象を一般道路まで拡大し、2023年度に約8万キロ、2024年度には約13万キロをカバーする計画を打ち出している。
また、現在日本と北米向けで異なる高精度3次元地図のデータフォーマットの統一も図る。国ごとに生じる車両のシステム開発や評価の負荷を軽減し、開発期間の短縮や開発コストの削減など開発効率化に貢献していくとしている。
■ダイナミックマップを開発する企業・団体
続いて、高精度3次元地図やダイナミックマップを開発する国内企業と海外企業を紹介する。以下が主な企業の一覧だ。
| 企業 | 概要 |
| ダイナミックマッププラットフォーム(日本) | 自動車メーカー各社が出資 |
| 三菱電機(日本) | 「自動図化・差分抽出ソフトウェア」を販売 |
| アイサンテクノロジー(日本) | 測量大手、大規模点群編集ツールなど |
| インクリメント・ピー(日本) | オランダHEREと提携 |
| ゼンリン(日本) | 高精度地図データなどを展開 |
| パスコ(日本) | 計測車両システムを運用 |
| ウーブン・プラネット(日本) | 地図生成プラットフォーム「AMP」を展開 |
| HERE(オランダ) | 2020年1月に3D道路モデル「HERE Lanes」を発表 |
| TomTom(オランダ) | 自動運転向けの高精度マップを発売済み |
| NavInfo(中国) | 位置情報サービスやHDマップなどを展開 |
| MapBox(アメリカ) | ソフバンクグループが出資 |
| DeepMap(アメリカ) | NVIDIAが買収 |
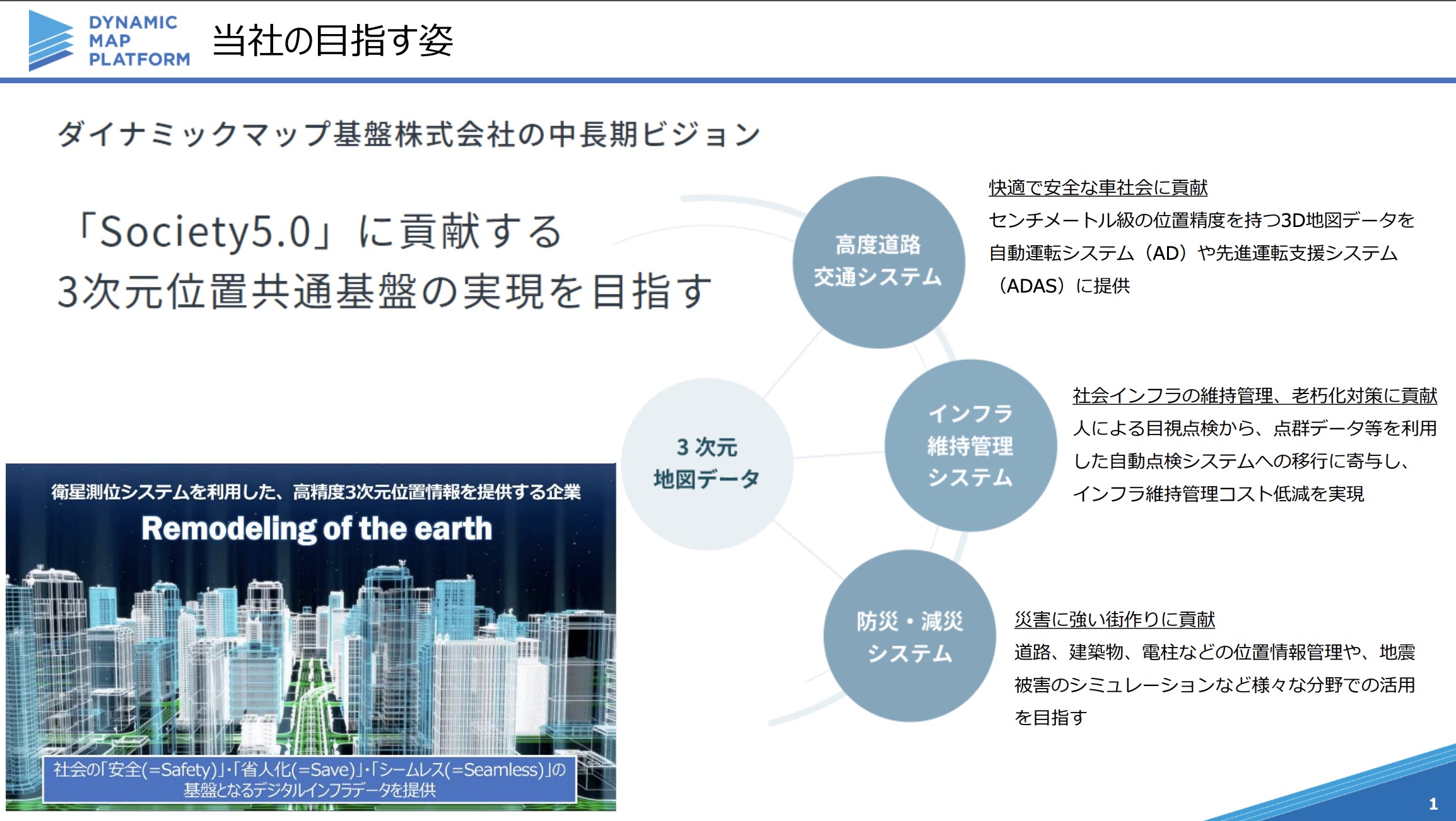
ダイナミックマッププラットフォーム:国内外でサービス拡大、東証グロースにも上場

国のSIP(戦略的イノベーション創造プログラム)において、ダイナミックマップの仕様などを検討してきた「ダイナミックマップ構築検討コンソーシアム」の6社と、自動車メーカーらが共同出資のもと2016年に設立した事業会社。
国内各社の地図・位置情報技術などを結集し、高精度3次元地図の開発や更新などを手掛けている。2023年2月に社名をダイナミックマップ基盤からダイナミックマッププラットフォームに改め、2025年3月には東京証券取引所グロース市場への上場を果たしている。
出資企業には、三菱電機、ゼンリン、パスコ、アイサンテクノロジー、インクリメント・ピー、トヨタマップマスター、いすゞ自動車、スズキ、SUBARU、ダイハツ工業、トヨタ自動車、日産自動車、日野自動車、本田技研工業、マツダ、三菱自動車工業など自動車業界や地図・位置情報関連企業をはじめ、産業革新機構(INCJ)やジャパン・インフラストラクチャー・イニシアティブ、三井物産、三菱UFJキャピタルが名を連ねている。
2019年に国内の高速道路と自動車専用道路 上下線計2万9,205キロの整備を完了したのを皮切りに一般国道のマッピングや海外展開を本格化しており、2025年5月時点で26カ国以上を対象に、国内3万3,000キロ、北米120万キロ、欧州25万5,000キロ、韓国2万キロを整備済みで、中東でも整備を進めているという。
海外展開に力を入れており、高精度3次元地図データに関する国際標準化の面でも重役を担うことになりそうだ。
採用実績も豊富だ。国内初のレベル2+を実現した日産スカイラインや、世界初のレベル3を実装したホンダレジェンドをはじめ、国内外の35車種で採用されたとしている。
同社の高精度3次元地図データには、膨大な容量の3次元点群データを基に「図化技術」と「データ統合技術」を用いて生成した地物が収録されている。高度化する自動運転やADAS(先進運転支援システム)をはじめ、シミュレータ環境の構築やインフラ管理などに利用されており、今後はその他モビリティの自動運転やVR、AR、ドローン航路作成などさまざまな分野での活用にも期待が寄せられているという。
高精度3次元地図の生成技術を応用した高精度ガイダンスサービスも提供しており、HDマップとタブレット、測位端末により、センチメートル級の高精度ガイダンスを提供している。除雪現場や空港などで活用されているようだ。
【参考】DMPの動向については「トヨタら共同出資のDMP、韓国の「高精度マップ市場」に参戦」も参照。
三菱電機:測位技術やマッピング技術生かし多方面で開発進める
AIと三菱モービルマッピングシステム(Mobile Mapping System)=MMS=の技術を活用し、高精度3次元地図を効率的に作成・更新できる「自動図化技術」と「差分抽出技術」を開発し、地図メーカーなどに対して、高速道路用高精度3次元地図向けの「自動図化・差分抽出ソフトウェア」を販売している。
MMSは3台のGPSアンテナとIMU、カメラ、レーザースキャナーを一体化したユニットで、自動車の天板上に装備して道路を走行することで絶対精度10センチ以内、相対精度1センチ以内の高精度な3次元計測を行うことができる。
【参考】三菱電機の取り組みについては「抜群の相性…自動運転の羅針盤「3D地図」と三菱電機の位置特定技術|自動運転ラボ」も参照。
アイサンテクノロジー:豊富な実証経験をもとに存在感発揮

MMSを活用した測量技術をはじめ、大規模点群編集ツールや後処理ソリューションなどさまざまなソフトウェアの開発も手掛けている。
多くの自動運転実証に参加しているほか、自動運転に必要とされる路面ペイントや 標識、電柱、ガードレール、信号といった地物情報や仮想車線中心線などの仮想地物も取り入れた汎用性の高い自動運転用高精度3次元地図「ADASmap」もソリューションとして提供している。
【参考】アイサンテクノロジーについては「自動運転分野に注力!測量大手アイサンテクノロジー、最新決算資料を読み解く」も参照。
インクリメント・ピー:世界規模のデジタルマップ構築へ HERE社と提携
デジタルマップビジネスを展開するインクリメント・ピーは、カーナビ事業などをベースに日本全国のデジタル地図データを自社整備しており、道路情報において業界トップレベルの鮮度と情報量を誇る。
自動運転関連では、オランダの位置情報サービス大手HERE Technologies(ヒア・テクノロジーズ)が推進しているグローバルデジタルマップの構築に向け、中国のデジタル地図サービス大手NavInfo、韓国の通信事業大手SK Telecomとともに「OneMap Alliance」を結成している。
2021年5月には、HERE Technologiesとの連携を強化し、位置情報データを一元化したプラットフォーム「HERE Marketplace」に自社の地図データ提供を開始したことを発表した。自動運転時代を見据えた業界全体の開発加速に加え、世界各国の企業による日本の地図情報を活用した新業態の事業開発やマーケティング活動など多用途な活用を見込む。
ゼンリン:地図情報大手 高精度地図データ提供やプラットフォームの検証
地図国内最大手のゼンリンもデジタル分野の取り組みを加速しており、高精度地図データやプラットフォームサービスなどを提供している。
ダイナミックマップ基盤のデータを基にした同社の3D高精度地図データは、すでに日産の「ProPILOT 2.0」やホンダの「Honda SENSING Elite」などに採用されており、正確な自車位置測位や道路環境認識の支援、走行レーンの先読み・ルート作成などに役立てられている。
また、シェアリングサービス向けにプローブ情報をそれぞれのレイヤー上に示すことで各車の現在地を可視化するサービスなどを手掛けているようだ。
協業関係では、日本における高度かつリアルタイムなトラフィックサービスの実現に向け、2017年にTomTomとゼンリンデータコムと共同開発することに合意している。
国内では、2020年にNTTと資本業務提携を交わし、高度地理空間情報データベースの共同構築を進めている。
パスコ:計測車両システム「Real Dimension」の運用開始
測量事業を手掛けるパスコもMMSを活用した高精度3次元地図の作製を早くから進めている。2020年には、路面性状計測と道路空間3D座標点群の取得、全周囲連続カメラ画像の撮影を1度の計測走行で可能にする新たな計測車両システム「Real Dimension(リアルディメンション)」の本格運用も開始している。
最先端の3次元計測技術の実用化を図るとともに、大容量データを効率的に加工・処理し情報を視覚化するソリューションを提供し、道路分野における3次元データの活用を推進していく構えだ。
ウーブン・プラネット・ホールディングス:オープンプラットフォーム「AMP」開発
トヨタグループにおける最先端技術開発部門としてTRI-ADから組織再編したウーブンは、高精度3次元地図生成に向けたオープンソースのプラットフォーム「AMP(Automated Mapping Platform)」の開発を進めている。
市販車に搭載されたカメラ画像や衛星画像を用いた高精度地図生成実証や、AMP上の車両データ形式を変換し、アルゴリズムを補正することで他社のプラットフォームで活用する技術実証なども行っている。
2020年4月には、AMP活用のもと車両センサーで収集した画像などのデータから道路上の変化箇所を検出することでDMPの高精度3次元地図の効率的な更新を行う実証にも着手したほか、2021年7月には次世代道路情報解析に強みを持つ米CARMERAの買収を発表するなど、取り組みをいっそう加速している。
【参考】AMPについては「AMPとは?トヨタTRI-ADの自動運転向け自動地図生成プラットフォーム」も参照。
AMPとは?トヨタTRI-ADの自動運転向け自動地図生成プラットフォーム https://t.co/C6oUp49vGP @jidountenlab #トヨタ #自動運転 #地図
— 自動運転ラボ (@jidountenlab) September 10, 2020
海外勢も研究開発を加速
海外勢では、HERE TechnologiesやTomTomといったオランダ勢を筆頭に、中国のNavInfo、米MapBoxなど、スタートアップをはじめさまざまな企業が高精度3次元地図の作製や関連技術の開発などを進めている。
また、DMPによるUshrの買収やウーブンによるCARMERAの買収など技術強化の向けた取り組みも熱を帯びており、2021年6月には半導体大手米NVIDIAがDeepMapを買収している。
自動運転関連企業では、イスラエルのMobileyeが地図をクラウドソース化する技術「REM」を活用し、自社ソリューションを搭載した車両から収集した画像データでマップ「Mobileye Roadbook」を作製する取り組みを進めている。
▼HERE Technologies公式サイト
https://www.here.com/jp
▼TomTom公式サイト
https://www.tomtom.com/en_gb/navigation/
▼NavInfo公式サイト
http://www.navinfo.com/en
▼MapBox公式サイト
https://www.mapbox.jp/
【参考】高精度3次元地図開発企業については「自動運転向け地図・マップ、必要な要素や開発企業を徹底まとめ」も参照。
自動運転向け地図・マップ、必要な要素や開発企業を徹底まとめ https://t.co/KpkSZcDJmt @jidountenlab #自動運転 #地図 #マップ
— 自動運転ラボ (@jidountenlab) June 30, 2021
■【まとめ】市場規模は拡大の一途
テスラなど一部の企業はダイナミックマップに依存しない自動運転システムの開発を進めており、必ずしも自動運転に必要――というわけではないが、現行技術で安全性を高めるためには非常に利便性の高いソリューションであることは間違いない。
今後、自動運転をはじめ、高度化が進む自家用車への採用例も大きく数字を伸ばしていくものと思われる。また、自動運転技術の拡大とともに幹線道路をはじめとした一般道路のマッピング需要も高まることが予想されるため、市場規模は今しばらく拡大の一途をたどることになりそうだ。
■関連FAQ
ダイナミックマップとは?
ダイナミックマップとは、高精度3次元地図に加え、交通規制や工事情報、渋滞情報、周辺車両や歩行者の情報などを統合したデータベース型の地図である。道路状況の変化をリアルタイムで反映できることが特徴で、自動運転を支える重要な情報インフラとして位置付けられている。
ダイナミックマップと高精度3次元地図の違いは?
高精度3次元地図は車線や標識、ガードレールなどの静的な情報を記録した地図である。一方、ダイナミックマップはその高精度3次元地図を基盤に、事故や渋滞、歩行者情報などの動的な情報を重ね合わせたものである。高精度3次元地図はダイナミックマップの一部である。
自動運転にダイナミックマップが必要な理由は?
自動運転車は、衛星測位システムや車載センサーの情報とダイナミックマップを照合することで、自車位置や周辺環境を高精度に把握できる。また、見通しの悪い交差点などでセンサーの死角を補い、安全性や信頼性の向上に役立つためである。
ダイナミックマップにはどのような情報が含まれる?
ダイナミックマップには、道路構造や車線情報などの「静的情報」、工事やイベント規制などの「準静的情報」、事故や渋滞などの「準動的情報」、歩行者や周辺車両の動きなどの「動的情報」の4種類が含まれる。それぞれ更新頻度が異なり、状況に応じて管理されている。
ダイナミックマップは自動運転以外にも活用できる?
活用可能である。物流、MaaS、防災、観光、道路インフラ管理、交通政策の立案など幅広い分野で利用が期待されている。道路や交通に関するデータを集約・分析することで、新たなサービスやビジネスの創出にもつながる。
(初稿公開日:2018年9月23日/最終更新日:2026年6月18日)
【参考】自動運転車の定義や仕組みについては「自動運転車とは? 定義や仕組み、必要な技術やセンサーをゼロからまとめて解説|自動運転ラボ」も参照。


・自動運転ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル・スズキ】欧米車種も")

」を紹介【2026/8最新】月額料金・対応車種・中古車サブスクも")


の意味・読み方は?自動車業界の新潮流を示す")
・自動運転ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル・スズキ】欧米車種も")

