


実用化のフェーズに入った「自動運転」。条件付きで自動運転を可能とするレベル3、一定条件下で無人運転を可能とするレベル4の社会実装も始まった。
ただし、従来ドライバーが担ってきた役割は、運転操作に関わる制御にとどまらない。役割の中には、事故対応など有人対応が求められるものもある。さまざまな役割が考えられる中、自動運転システムはどこまでを担うことができ、またどこまでを担うべきなのか。詳しく解説。
記事の目次
| 編集部おすすめサービス<PR> | |
| 自動車保険 スクエアbang!(一括見積もり) 「最も安い」自動車保険を選べる!見直すなら今! |  |
| 新車定額!リースナブル(車のカーリース) お好きな車が月1万円台!頭金・初期費用なし! | |
| 車業界への転職はパソナで!(転職エージェント) 転職後の平均年収837〜1,015万円!今すぐ無料登録を | |
| タクシーアプリは「DiDi」(配車アプリ) クーポン超充実!「無料」のチャンスも! | |
| 編集部おすすめサービス<PR> | |
| スクエアbang! |  |
| 「最も安い」自動車保険を提案! | |
| リースナブル | |
| 新車が月々2万円から! | |
| パソナキャリア | |
| 転職後の平均年収837〜1,015万円 | |
| タクシーアプリDiDi | |
| クーポンが充実!「乗車無料」チャンス | |
■運転前
自動運転システムの役割
自動車を運転する際、ドライバーはその車両のサイズや死角、内輪差といった特性を知っておく必要がある。また、発進前には車両の周囲に人がいないか、障害物がないかなど安全確認を行う必要もある。
こうした義務に対し、自動運転車はどのように対応するのか。センサーで周囲の状況を検知する一般的な自動運転システムは、360度死角ができないように各種センサーが配置され、走行中はもちろん、発車前も周囲の安全を随時確認する。
また、統合(搭載)された車両のサイズや内輪差などを自動運転システムが正確に把握済みであることも絶対条件となる。周囲の歩行者や車両などにぶつかることなく所定の車線内を走行するには、こうした基礎的な情報が必要不可欠であることは言うまでもないだろう。

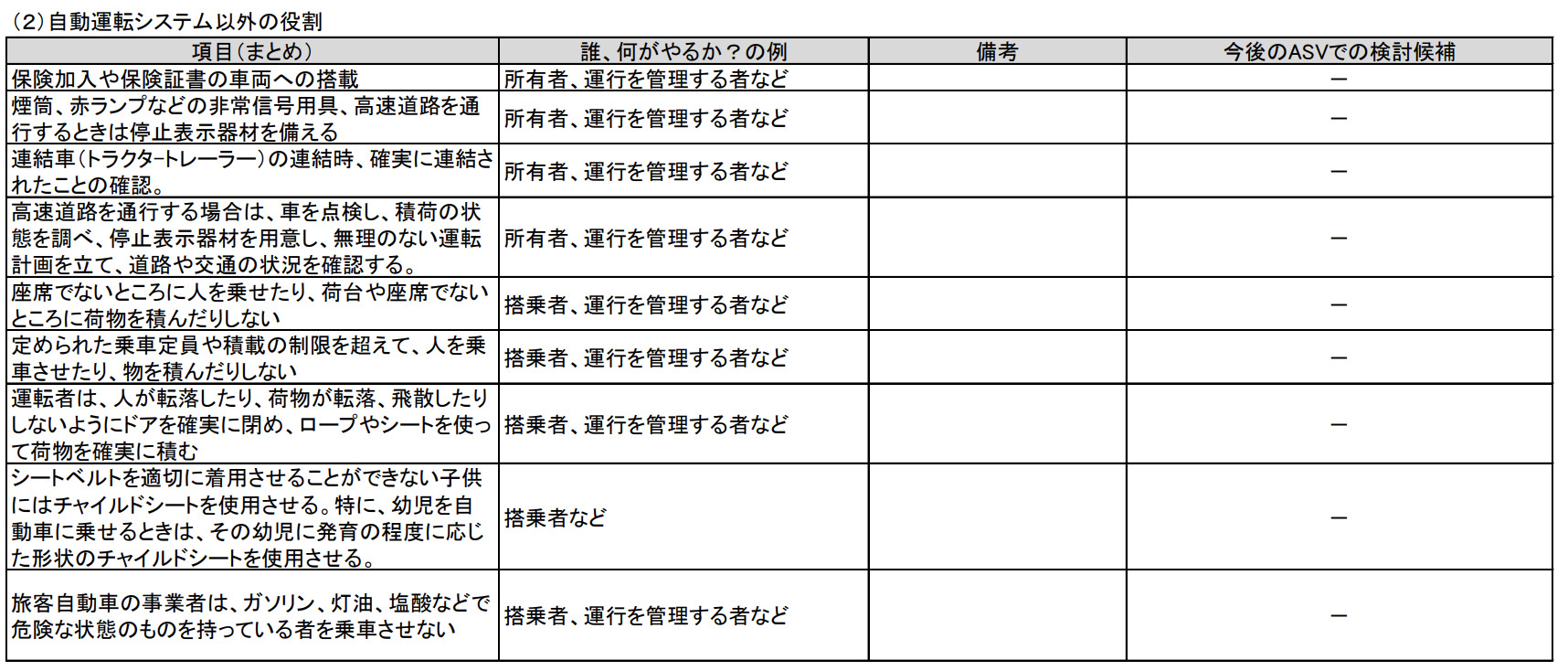
自動運転システム以外の役割
ドライバーの介在無しで走行することができる自動運転車だが、運転前の段階では所有者や管理者が行うべき役割はいろいろあるようだ。
保険の加入や保険証書の車両への搭載、煙筒や赤ランプなど非常信号用具の確認・搭載などは、現時点では手動で行う必要がある。将来においては、保険証書のデジタル化や必要装備類の刷新などにより、こうした役割も人の手から離れる可能性がありそうだ。
また、移動サービスなどにおいては、乗客が危険物を持ち込まないようにする仕組みづくりや、小さな子どもなどが車内で安全に着座しているかなど、センサーなどによる検知とあわせてアナログ的な対応が求められる場面もしばらくはありそうだ。
議論が必要なもの
自動運転システムがどこまでやるべきか議論が必要なものとしては、車検や日常点検、異常把握、車の下部における人や障害物の有無の確認などが挙げられる。
ほぼ全てのシステムがECU(電子制御ユニット)によって電子制御化された自動運転車は、各システムのエラーを逐次把握することができ、一定の日常点検や異常は自己診断によりまかなうことができる。
ただし、自動運転システムが自動で診断可能な事象以外の点検項目に関しては、車両メーカーやシステムメーカーが所有者や運行管理者などに事前に提示し、これまでと同様人が実施する必要があるとしている。異音や振動など、システムによって検知可能・未対応なケースなど各自動運転システムで対応が分かれそうな要素も多い。
ウォッシャー液で取れないフロントガラスの汚れやセンサー表面の汚れなど、人が随時チェックし対応しなければならないケースもありそうだ。
車両下部の検知は、自動運転システムにおいて意外と盲点となっており、マストな役割とは言い切れないようだ。360度センシング可能であるものの、車体の真下までを随時認識しているとは限らない。こうした役割は、人に委ねても良いのではないか――としている。

■運転計画時
自動運転システムの役割
運転計画時における自動運転システムの役割としては、「自分の運転技能と車の性能に合った運転計画を立てる」「次の分岐・合流・流出の選択(標識、首都高速など)」を挙げている。
目的地までのプランニングは、基本的に自動運転システムが行う。どのルートをたどれば効率的に運行することができるかといった従来のカーナビ同様の機能に加え、走行するレーン別の細かなルーティングや渋滞・事故情報などリアルタイムの情報を加味したルーティングなども基本となる。
さらに、自動運転システムの能力に応じたルーティングも必要となる。見通しの悪い路地や交通量が多く車両の平均速度が速い道路をなるべく避けるなど、安全を確保しやすい経路を選択するのも重要だ。
また、WGは、プランニングにおいて運行管理者や搭乗者要求による変更の可能性にも言及し、こうしたアレンジはサービスの範疇であるものの、その場合においても法規遵守はシステムの責任としている。

自動運転システム以外の役割
所有者や運行管理者の役割として、「大型車における車両の重さ、高さ、幅、長さ、危険物搭載等による事前の走行ルート確認」を挙げている。自動運転システムの成熟度によってはこうした確認も自動で行うことが可能になりそうだが、積載物の種類によっては慎重な対応が求められるケースもありそうだ。

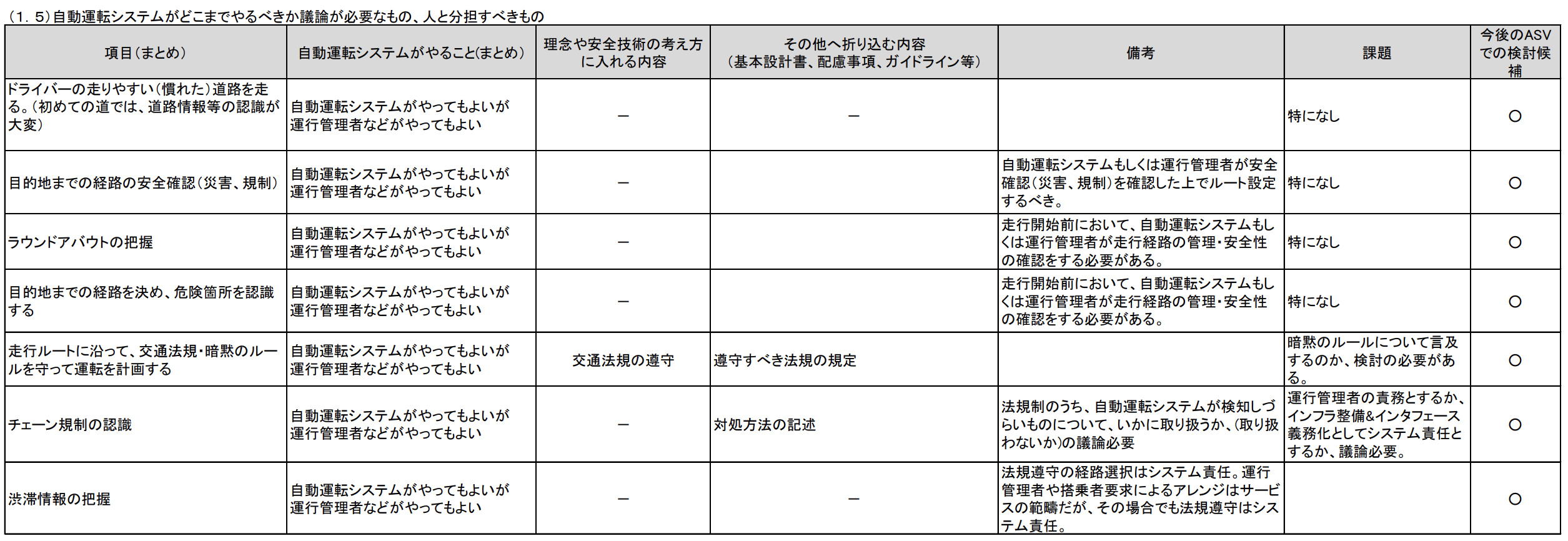
議論が必要なもの
議論が必要なものとしては、「ドライバーが走りなれた道路の選択」や「ラウンドアバウト(環状交差点)の把握」「チェーン規制の認識」「交通法規・暗黙のルールを守った運転計画」などが挙げられている。
チェーン規制の認識・対応など、特殊な交通規制においては管理者らが介入したほうがスムーズな場合もありそうだ。運転計画時における暗黙のルールについては、具体的に何を想定しているかは不明だが、WGは暗黙のルールについて言及するのか検討の必要があるとしている。
■運転中
自動運転システムの役割
運転中においては、交通法規の順守や周囲の状況を正確に把握した安全走行に加え、「前方車両を追い抜く際の対向車線へのはみだしや路側帯へのはみ出し走行時の安全確認」「周囲の交通参加者に脅威にならないスムーズな運転操作」「同乗者、乗客の安全を配慮した運転」が挙げられている。
自動運転車による前方車両の追い抜きは、駐停車している車両を追い抜くケースが大半と思われる。自動運転システムの開発におけるメジャーな課題で、特に対向車線にはみ出さなければならないケースをいかに安全かつスムーズに行うことができるかがカギとなる。
同様に、右折待ちの前方車を交わすため路側帯にはみ出す場合など、本来走行すべき車線をはみ出さなければならないケースは多いが、こうした対応についても自動運転システムが解決しなければならない。
一方、交通法規の遵守に関しては、それが前提となることに異論はないものの、法規を厳密に守ることでかえって危険な状態になったり交通流を乱したりする恐れがあることを指摘しており、危険状態を避け、交通流を乱さない目的とのバランスを課題に挙げている。

自動運転システム以外の役割
運転中における自動運転システム以外の役割については特に言及されていない。
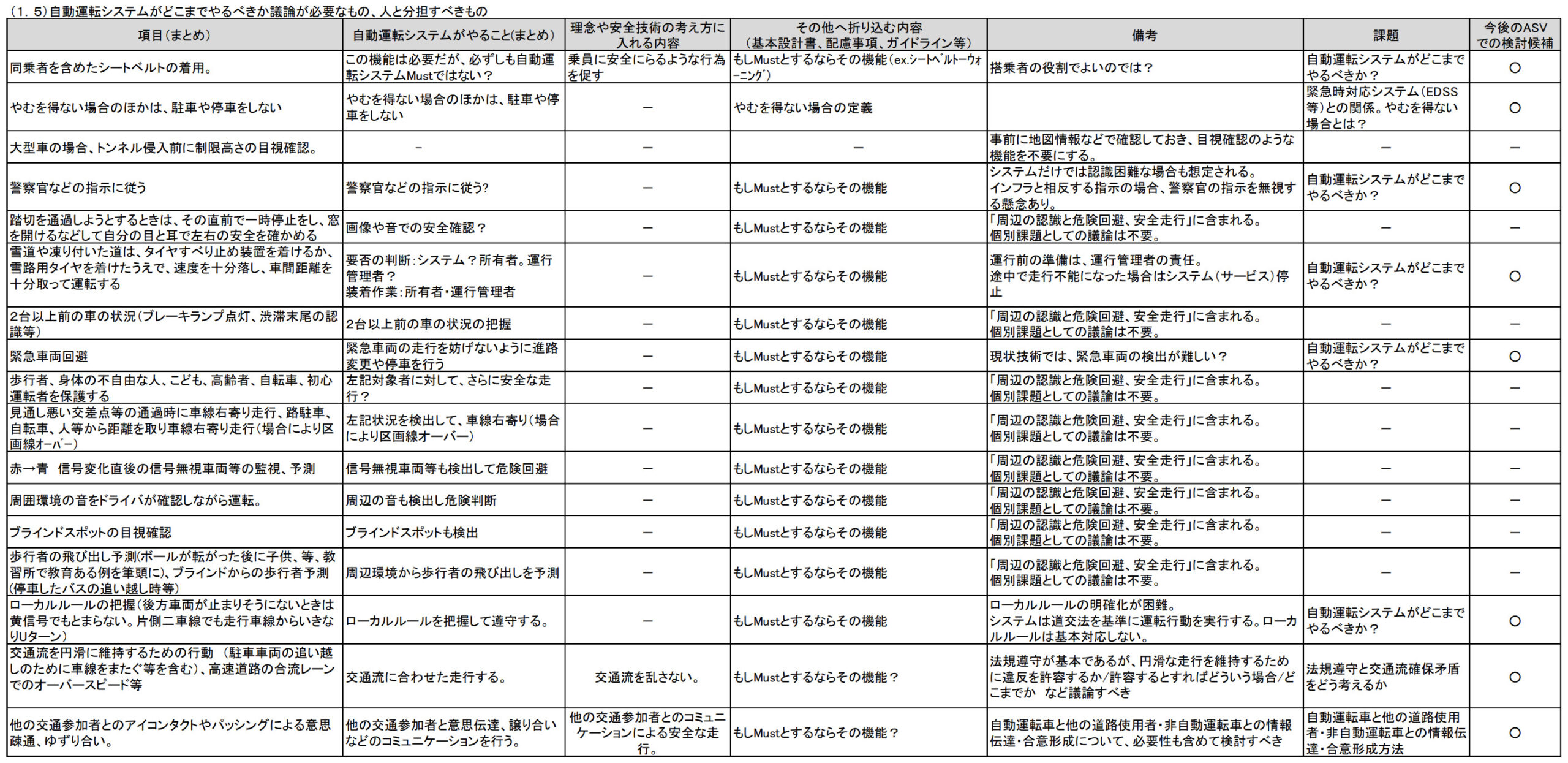
議論が必要なもの
議論が必要なものとしては、「警察官などの指示に従う」「緊急車両回避」「ローカルルールの把握」「交通流を円滑に維持するための行動」「他の交通参加者とのアイコンタクトやパッシングによる意思疎通、ゆずり合い」などを挙げている。
交通事故現場などで警察官が交通誘導している場合、自動運転車がその指示をくみ取ることができるかがカギとなる。検問などで停止指示が出されることなども考えられる。システムだけでは認識困難な場合も想定され、また信号機などのインフラと相反する指示が出された場合、警察官の指示を無視する懸念もあるとしている。
救急車や消防車なども同様で、このような緊急車両の検出を全ての自動運転車ができるとは限らない。
緊急車両の場合、自動運転車向けに特別な通信信号を送ることなどで将来的には解決できそうだが、警察官などによる手動の誘導にどこまで対応できるかは現状未知の領域だ。こうしたケースへの対応をマストとする場合、どのような仕組みが考えられるか検討が必要だ。
「ローカルルールの把握」に関しては、例として後方車両が止まりそうにないときは黄信号でも止まらないことや、片側二車線でも走行車線からいきなりUターンするケースなどを挙げている。地域によっては非常に危険な運転が横行している場合もあるが、こうしたローカルルールの明確化は困難なため、システムは道交法を基準に運転行動を実行し、ローカルルールには基本的に対応しないとしている。
一方、「交通流を円滑に維持するための行動」においては、駐車車両の追い越しのために車線をまたぐケースや、高速道路の合流レーンにおけるオーバースピードなどを挙げ、交通法規遵守が基本であるものの、円滑な走行を維持するために違反を許容するかどうか、許容するとすればどういう場合にどこまで許容するのかなどを議論すべきとしている。
「他の交通参加者とのアイコンタクト」などについては、自動運転車と他の道路使用者・非自動運転車との情報 伝達・合意形成について、必要性も含めて検討すべきとしている。
自動運転の開発においては、歩行者など周囲の交通参加者向けに外向けのHMI(ヒューマン・マシン・インタフェース)でコミュニケーションを図る取り組みも各所で進められている。自動運転車から一方的に情報を伝達することは難しい技術ではなさそうだが、周囲の車両や歩行者の意図をくみ取るケースを考えると一気にハードルが上がる。
情報伝達・合意形成方法としてどのような仕組みが可能か、研究開発の余地がまだまだありそうだ。
このほか、雪道や凍り付いた道において、タイヤすべり止め装置の装着や、雪路用タイヤを着けたうえで速度を十分落とし、車間距離を十分取って運転するケースなども挙げられている。
運行前の準備は運行管理者の責任であり、途中で走行不能になった場合はシステム・サービスを停止するものとしているが、予報が外れ、走行中に天気が急変する可能性は十分考えられる。にわか雨・ゲリラ豪雨によって一時的に停止せざるを得ない状況や、急な冠水によって運行不可能に陥るケースなどもありそうだ。有事の際、ただちに対応できるよう事前にシミュレーションしておく必要がある。
■緊急時
自動運転システムの役割
緊急時となる事故発生時においては、事故の続発を防ぐため、他の交通の妨げにならないような安全な場所に車両を止め、エンジンを切ることが求められる。自動運転システムも、一般車両の運転者の行動と同様にふるまうことが望ましいとしている。

自動運転システム以外の役割
事故時においては、応急救護処置や負傷者の応急処置・安全な場所への移動などの保護、遺留品の保管などが必要なケースが考えられる。警察者消防などへの通報も、単なる通報ではなく事故の状況を詳細に説明しなければならない。
自動運転車の車内に管理者がいない場合、搭乗者が対応しなければならないケースも出てきそうだ。そうした際、搭乗者へのガイダンスの可否や、遠隔監視・通信による管理者からのアナウンス方法など、さまざまなケースを想定してシミュレーションを行っておく必要がありそうだ。

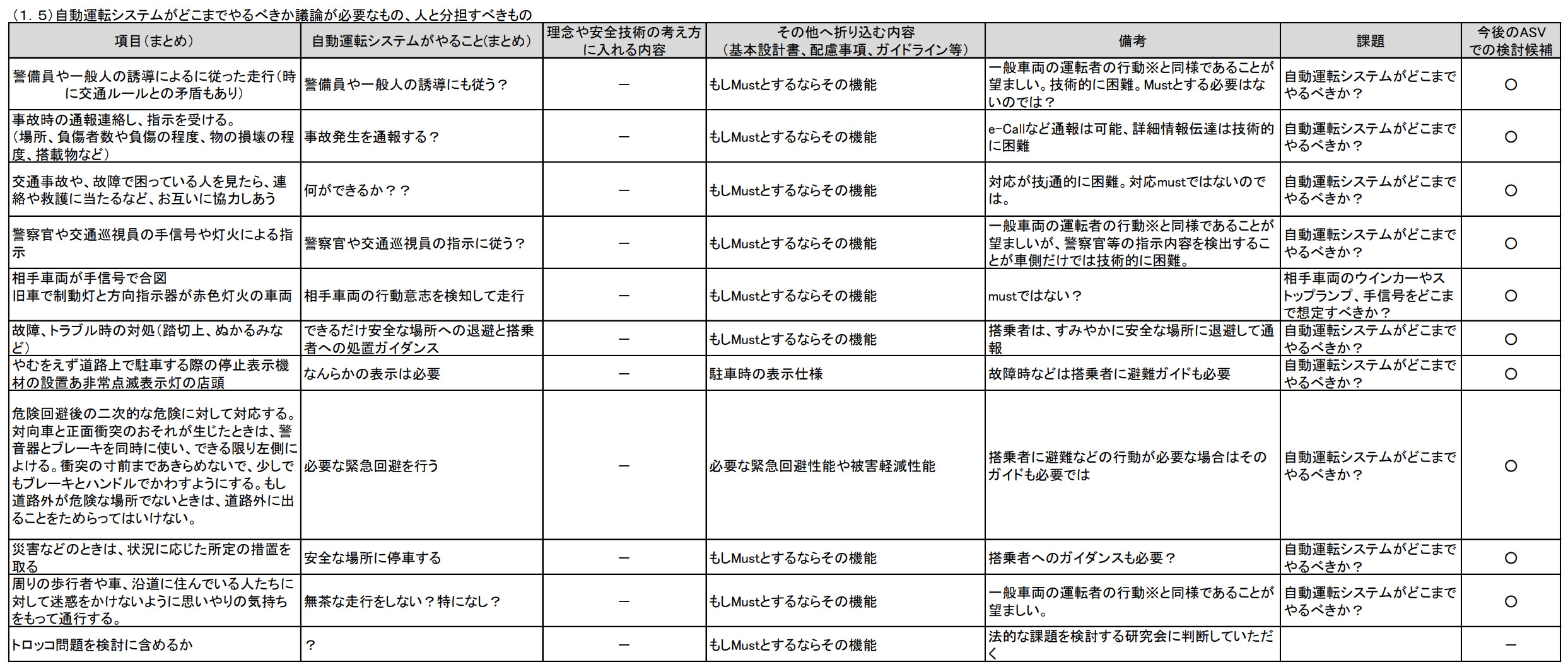
議論が必要なもの
議論が必要なものとしては、「運転中」の項目と重複するが「警備員や一般人の誘導に従った走行」「事故時の通報連絡や指示の受け方」「警察官や交通巡視員の手信号や灯火による指示」「手信号による相手車両からの合図」「故障、トラブル時の対処」「やむをえず道路上で駐車する際の停止表示機材の設置」「トロッコ問題」などを挙げている。
やはり手動による誘導や指示、合図の類をシステムが確実に検知・判断するのは現状難しいようだ。
故障・トラブル時の対処としては、できるだけ安全な場所への退避と搭乗者へのガイダンスが必要となる。踏切内での急な故障や高速道路上における緊急停止など、搭乗員の協力が必須となる場合や速やかな指示が必要となる場合なども考えられる。
トロッコ問題については、法的な課題を検討する研究会に判断してもらうとしている。歩行者や搭乗員、周囲の車両など、何らかの犠牲を避けられない状況下でAI(人工知能)はどのような判断を下すべきか。一定の結論を出さねばならない時は刻々と近付いているようだ。
【参考】トロッコ問題については「自動運転にAI(人工知能)は必要?倫理観問う「トロッコ問題」って何?」も参照。
■現在開発されている自動運転システムの一例
現在さまざまな企業が自社向けもしくは販売目的で自動運転システムを開発している。よく知られている自動運転システムとしては以下のようなものがある。それぞれ詳しく解説していこう。
| 自動運転システム名 | 開発企業 |
| Waymo Driver | Waymo(アメリカ) |
| FSD(Full Self Driving) | Tesla(アメリカ) |
| トラフィックジャムパイロット | ホンダ |
| Autoware | ティアフォー |
Waymo Driver(Waymo)
グーグルの自動運転開発部門が分社化する形で2016年12月に誕生した米Waymo。そのちょうど2年後、世界初となる自動運転タクシー「Waymo One」のサービスを開始し、同社は自動運転業界のフロンティアとして知られるようになった。
同社が開発する自動運転システムが「Waymo Driver」で、2020年3月に発表された第5世代が最新バージョンだ。従来バージョンに比べ、LiDARの解像度や長距離カメラなどの性能がアップし、最適な場所に再レイアウトしたことで機能と安全性が最大限に引き出されている。
すでにWaymo Driverはその安全性が人間を超えており、事故率の比較では人間よりもはるかに良い成績を残せている。
▼Waymo公式サイト
https://waymo.com/
【参考】関連記事としては「Googleの自動運転車、ついに「人間超え」!死亡事故が9割減」も参照。
FSD(Tesla)
EV(電気自動車)大手として知られる2003年設立の米Tesla。2020年10月に「Full Self-Driving(FSD)」ベータ版の提供を開始した。直訳すると「完全自動運転」という意味だが、今のところは技術レベルはADAS(先進運転支援システム)にとどまっている。自動運転レベルにすると「レベル2+」だ。
今後OTA(Over The Air)でアップグレードを繰り返し、自動運転機能を徐々に搭載していく方針だ。ただし、FSDを搭載可能なモデルだとしても旧式のテスラ車では、ハードウェアがそのままの状態だとFSDのアップデートによる完全自動運転が実現できないことも明らかになっている。
▼テスラ公式サイト(米国)
https://www.tesla.com/
【参考】関連記事としては「テスラの旧式車「完全自動運転は不可能」と判明!中古価値暴落か」も参照。
トラフィックジャムパイロット(ホンダ)
世界に先駆けて自動運転レベル3の量販車の販売を実現したホンダ。同社の自動運転システムは「トラフィックジャムパイロット」だ。
トラフィックジャムパイロットは高速道路を走行中、渋滞にあった場合に作動する。LiDARとミリ波レーダーがそれぞれ5基、レーダーの360度センシングと各種センサー、高精度なGNSSを組み合わせ、レベル3を実現させた。
【参考】関連記事としては「ホンダの自動運転戦略 レベル3車種「レジェンド」を発売」も参照。
ホンダの自動運転戦略(2021年最新版) レベル3車種「レジェンド」を発売 https://t.co/A5epbw13PK @jidountenlab #ホンダ #自動運転 #レベル3
— 自動運転ラボ (@jidountenlab) November 22, 2021
Autoware(ティアフォー)
名古屋大学初の自動運転スタートアップであるティアフォーは、自動運転ソフトウェア「Autoware(オートウェア)」を開発している。Autowareはオープンソースソフトウェアとして公開されており、世界各地でAutowareを活用した自動運転実証が行われている。
Autowareの開発だけではなく、低速完全自動運転EVとして「Milee(マイリー)」を開発するなど、展開するソリューションを多様化している印象だ。
■【まとめ】役割を明確化にすることで自動運転の在り方も鮮明に
自動運転システムが担うべき役割に関する議論は、今後いっそう活発化することが予想される。レベル5はもとより、レベル4においてもODD(運行設計領域)の拡大に伴い役割を明確化しなければならない場面は次々と表面化してくるはずだ。
技術で解決可能なもの、人の手が必要なもの、役割の担い手として搭乗員が心がけておくべきことなどしっかり整理することで、自動運転の在り方も明確なものへと変わっていく。今後、こうした議論が各所で活発化することに期待したい。
▼第6期先進安全自動車(ASV)推進計画成果報告について
https://www.mlit.go.jp/jidosha/anzen/01asv/report06/index.html
▼運転自動化レベル5の場合の自動運転システムの役割想定と基本理念考え方に織込むべき内容
https://www.mlit.go.jp/jidosha/anzen/01asv/report06/file/siryohen_16_kihonrinen.pdf
※自動運転ラボの資料解説記事は「タグ:資料解説|自動運転ラボ」でまとめて発信しています。
■関連FAQ
一般的に、自動運転システムは自動運転レベル3以上、ADASは自動運転レベル2以下の機能のことを指す。自動運転レベルについては「自動運転レベルとは?」を参照。
オープンソースの自動運転OSを開発している企業としては、日本のティアフォーが挙げられる。自社の自動運転タクシー向けにシステムを開発している企業としては、Google系Waymoなどがある。ホンダは自動運転レベル3が可能な市販車向けに「トラフィックジャムパイロット」を開発している。
ODDとは「運行設計領域」のことで、「Operational Design Domain」の略語だ。自動運転システムが作動する前提となる走行環境条件のことを指す。詳しくは「自動運転における「ODD」って何?」を参照。
2022年1月現在、定価を明示して大々的に自動運転システムを販売している企業はまだない。しかし、テスラは将来的に自動運転が可能になるとする「FSD(Full Self-Driving)」という機能を、テスラ車のオーナーに対して「買い切り型」もしくは「サブスク型」で提供している。
(初稿公開日:2021年8月2日/最終更新日:2026年5月29日)
【参考】関連記事としては「自動運転、死傷事故を約9割削減 ASV推進計画、第6期報告書を公表」も参照。
とは?いつ実現?")

とは?搭載する自動車の車種は?自動運転ではない?")



の自動車保険を比較!")
の意味・定義・読み方は?自動車業界の新潮流を示す")
ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

