


国土交通省所管の「ASV推進検討会」はこのほど、第6期計画の成果報告書を取りまとめた。ADAS(先進運転支援システム)の開発・普及において長きにわたり貢献してきた同会。この記事では、6期の成果報告書の内容を解説していく。
ちなみに第6期計画の成果報告書では、自動運転で死傷事故約を9割削減できるという推計も掲載されており、業界関係者は必読の内容と言える。
▼第6期報告書 本編
https://www.mlit.go.jp/jidosha/anzen/01asv/report06/file/asv6_houkokusho_honpen.pdf
▼第6期報告書 資料編
https://www.mlit.go.jp/jidosha/anzen/01asv/report06/file/asv6_houkokusho_shiryohen.pdf
記事の目次
■先進安全自動車(ASV)推進計画の概要
ASVは「Advanced Safety Vehicle」の略で、先進技術を利用してドライバーの安全運転を支援するシステムを搭載した自動車を指す。
ASV推進計画は、このASVに関する技術開発・実用化・普及を促進するプロジェクトで、自家用車におけるASVが浸透していなかった1991年度にスタートした。
以後、5カ年ごとに計画は更新されており、現在第6期計画(2016~2020年度)を終えたばかりだ。6期計画では、近年活発化している自動運転技術に関しても盛り込まれた。
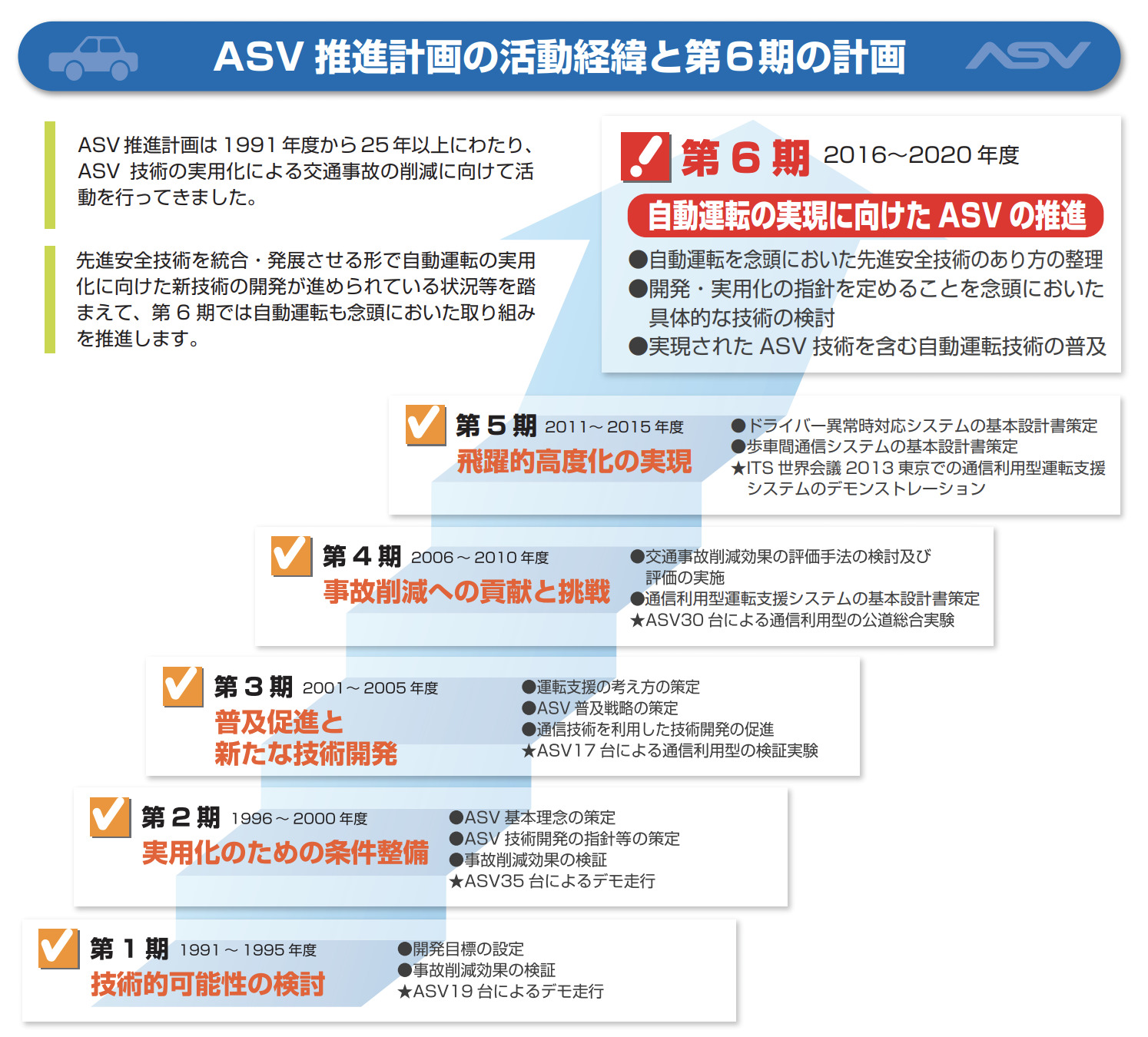
ASV技術はドライバー支援を原則としているが、自動運転技術はASV技術を統合・発展させる形で進化している点や、交通事故削減に貢献するといった大義名分のもと、システムがドライバーの運転の一部または全てを行う自動運転もASVに取り入れ、検討を進めている。
第6期では、「自動運転の実現に向けたASVの推進」を基本テーマに据え、「自動運転を念頭においた先進安全技術のあり方の整理」「開発・実用化の指針を定めることを念頭においた具体的な技術の検討」「実現されたASV技術を含む自動運転技術の普及」の3点をもとに計画を進めている。
ASV推進検討会の下に先進安全技術普及分科会、将来技術実用化分科会を設け、安全技術のあり方検討WG(ワーキンググループ)、普及戦略検討WG、ドライバー異常・監視技術検討WG、自動認識技術等検討WGの4WG体制で議論を進めてきた。
以下、各WGの取り組みを解説していく。
■安全技術のあり方検討WG
安全技術のあり方検討WGは、主に以下について検討を行った。
- ①自動運転を前提とした基本理念の再検討
- ②混在交通下に自動運転車を導入した際の影響や留意点の検討
- ③自動運転システムの事故削減効果
混在交通下に自動運転車を導入した際の影響や留意点の検討
②(混在交通下に自動運転車を導入した際の影響や留意点の検討)では、自動運転車と一般車両や自転車、歩行者といった他の交通参加者が混在する際の留意点をシーンごとに検討し、自動運転システムを開発する際の配慮事項として整理した。
高速道路においては、合流地点における一般車両の車線変更や一般車両の渋滞車列への合流、合流時に後方から一般車両が速度超過で接近、料金所における周辺車両との速度差、トラックの隊列走行への割り込みなどを抽出している。
一方、一般道路においては、横断歩道や歩行帯がない道路での歩行者の飛び出しや交差点での右左折時のルール違反歩行者との接触、信号なし横断歩道における判断、事故現場などにおける誘導員の認識、左折時の自転車巻き込み、右折時の対向車両死角からの直進二輪車などを抽出した。
対応例としては、自律センサーによる周辺検知やV2X技術による周辺車両の把握、外向き HMI(ヒューマンマシンインターフェース)による意思表示、歩行者の位置や挙動に合わせたリスク低減操作などを挙げている。
自動運転システムの事故削減効果
③(自動運転システムの事故削減効果)では、自動運転車両が普及した場合、現在発生している死傷事故がどの程度削減されるかを推定した。2018年中に発生した事故のうち、発生状況不明の事故や四輪車以外の当事者同士による事故などを除いた41万4,409 件を対象に39の事故パターンそれぞれで解析した。
事故パターンごとに算出された事故削減率を集約し、全国の死傷事故に置き換えた事故削減件数を算出、その上で死傷事故全体の事故削減率を求めたところ、ADASで約7割、自動運転で約9割の死傷事故を削減できると推計された。
しかし、事故の発生要因となったA当事者にADASや自動運転の装備がなく、もう一方の当事者であるB当事者がADASや自動運転技術を搭載していたケースでは1割程度の事故削減効果しか期待できず、逆にB当事者が無装備でA当事者がADAS搭載の場合約6割、A当事者が自動運転の場合9割弱の削減効果が見込めたという。
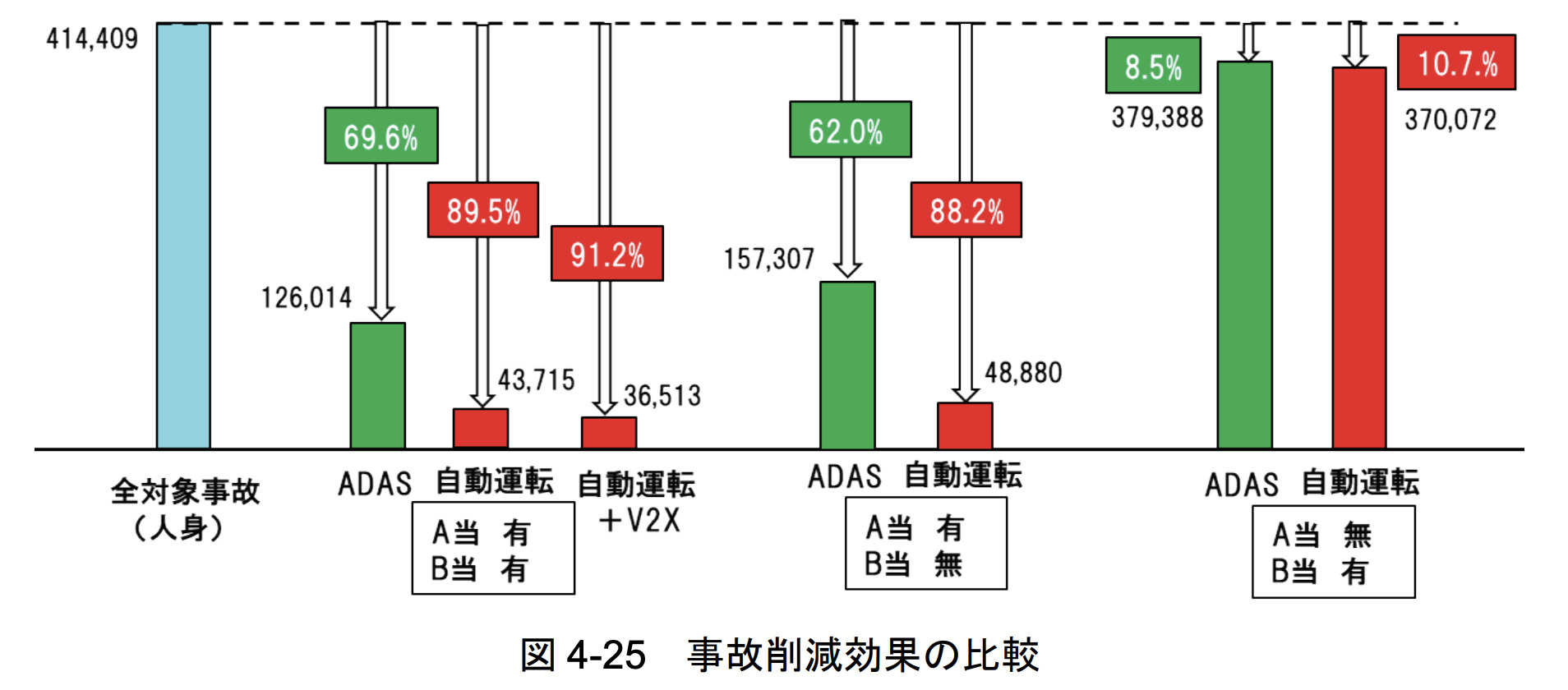
なお、調査は各機能の作動率100%、普及率100%という理想的な条件のもとで解析しており、実際は環境条件や運転者属性、交通流の状況などの影響を受け作動率は低下するとしている。
■普及戦略検討WG
普及戦略検討WGは、主に以下について検討を進めた。
- ①ASV技術の共通定義に関する検討
- ②自動運転に関する用語のとりまとめ
- ③啓発用パンフレット・普及活動
共通定義においては、ドライバー異常時対応システムや車線変更支援制御装置、運転者監視システム、緊急制動表示装置などが新たに追加された。
また、今後実用化・普及が見込まれるレベル3以降の運転自動化技術の取り扱いについても検討を行っており、一般ユーザーに対しレベル3以降の運転自動化技術を正しく理解してもらうには、各レベルの機能の違いや責任の所在の違いについて正確に伝えることが重要としている。
なお、2020年時点で実用化された製品がなく具体的な議論に至らなかったため、第6期で課題を整理し、次期に引き継ぐとしている。
【参考】自動運転に関する用語については「【資料解説】自動運転関連用語、国はどのように概説している?」も参照。
【資料解説】自動運転関連用語、国はどのように概説している? https://t.co/xoYAfJVP7U @jidountenlab #自動運転 #用語 #説明
— 自動運転ラボ (@jidountenlab) December 21, 2020
■ドライバー異常・監視技術検討WG
ドライバー異常・監視技術検討WGは、主に以下について検討を進めた。
- ①路肩退避型等発展型ドライバー異常時対応システムの技術要件と課題検討
- ②ドライバー異常検知手法の技術要件等
- ③ドライバーモニタリング手法の技術要件等
体調急変などにより、運転中にドライバーが安全運転を継続できなくなった際、ドライバーの異常を検知するシステムや自動車を安全に停止させる技術に関する基本設計書などを作成している。
検知方法としては、姿勢の崩れや閉眼、ハンドル無操作、血行動態の低下、眼球の偏り、車両のふらつきなどを挙げ、それぞれの指標や閾値などを解説している。
ドライバー異常時対応システムの基本設計書では、制御開始タイミングや車両を車線内走行させる方法、道路端に寄せる方法、減速停止させる方法、制御中のオーバーライド、車外の道路利用者への報知、他の運転支援制御システムと競合が生じた場合の考え方などについて、高速道路、一般道路別に解説している。
ドライバーモニタリングシステムは、依然なくならない居眠り運転や急病による事故防止に大きく貢献するほか、ハンズオフ運転が可能な高度なレベル2やアイズオフを可能とするレベル3などでも必須技術となる。近い将来、標準装備化が進む可能性もありそうだ。
【参考】ドライバーモニタリングシステムについては「自動運転レベル3でも有用!見守りシステムやDMSの開発加速」も参照。
自動運転レベル3でも有用!見守りシステムやDMSの開発加速 https://t.co/pgYLKTAi2V @jidountenlab #自動運転 #レベル3 #見守り #DMS
— 自動運転ラボ (@jidountenlab) June 15, 2021
■自動認識技術等検討WG
自動認識技術等検討WGは、主に以下について検討を進めた。
- ①電子牽引による後続無人隊列走行システム
- ②ISA(自動速度制御装置)
- ③ラストマイル自動運転車両システム
- ④周辺環境の認識向上に係る検討
- ⑤大型車向けの側方衝突警報装置
①では、日本国内で要求がある後続無人隊列走行に関する固有の技術的課題や技術的要件について検討を行っている。②では、速度超過による事故分析や速度超過を抑制する装置などの検討例の把握、国内外における規制化などの状況や課題をまとめ、ISAのあり方について技術的要件をまとめている。
③では、ラストマイル自動運転について関連するプロジェクトの調査や検討項目の抽出などを行い、車両システムに関する技術的な基本設計書案の策定をした。
基本設計書では、ラストマイル自動運転において共通的に考えられるODDとして、対象道路や走行経路などの道路条件・地理条件、時間的制約や天候による制約といった環境条件、走行速度などの走行条件、機能的走行空間を挙げている。
また、ラストマイル自動運転車両全般に共通かつ特有の技術的要件として、歩行者・自転車への対応や外向きHMI、自動運転システムの機能異常時に車両が目指す安全状態を示すMRC(ミニマルリスクコンディション)や、安全状態に至るまでの車両運動制御を示すMRM(ミニマルリスクマヌーバ)などについて考え方をまとめている。
【参考】関連記事としては「自動運転における「ミニマム・リスク・マヌーバー(MRM)」とは?」も参照。
自動運転における「ミニマル・リスク・マヌーバー(MRM)」とは? https://t.co/WH93LhVrm0 @jidountenlab #自動運転 #MRM #停車
— 自動運転ラボ (@jidountenlab) February 3, 2020
■【まとめ】自動運転で変革する道路交通 第7期の検討に期待
第6期では、ADASに留まらず自動運転技術に関する検討が増え始めた印象だが、2021年度から始まる第7期は、レベル3やレベル4の本格社会実装期となり、検討内容も大きく刷新される可能性が高そうだ。
特に、自動運転車と一般車両が混在する道路交通環境を見越した具体的な検討などは必須となる。大変革を迎える道路交通社会が黎明期を迎える中、技術の進展と交通安全を促進する同会の取り組みに引き続き期待したい。
※自動運転ラボの資料解説記事は「タグ:資料解説|自動運転ラボ」でまとめて発信しています。
【参考】関連記事としては「【資料解説】2021年版の国土交通白書、自動運転とMaaSにはどう言及?」も参照。







の意味・読み方は?自動車業界の新潮流を示す")
ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

