


自動運転開発を手掛けるティアフォーは2020年8月、これまでの開発や実証を通じて積み重ねた知見を集約した「Tier IV Safety Report 2020」を公開した。自動運転に対するアプローチや考え方、課題と対策などをまとめたレポートで、業界関係者はもちろん、これから自動運転技術の開発や実装に着手しようと考えている関係者にとっても必見の内容となっている。
数々の実証をこなしてきたティアフォーの知見はどのようなものか。セーフティレポートの要点をまとめてみた。
▼Tier IV Safety Report 2020
https://tier4.jp/wp/wp-content/uploads/2020/08/Safety-Report-Jpn-8_11-master_compressed.pdf
記事の目次
■Tier IV Safety Report 2020の概要とティアフォーの考え方
レポートは全51ページで、自動運転技術の社会実装に向けた同社の考え方をはじめ、実証実験の実績と自動運転の普及に向けたアプローチ、今後の技術開発、今後の事業と社会環境整備などについて記されている。
「自動運転の民主化」をビジョンに掲げる同社は、自動運転に資するテクノロジーをオープンソース化することで持続的なエコシステムを構築し、このシステムを最大限活用した「水平分業型」の開発を展開することで、透明性や安全性、費用対効果の高い自動運転技術の確立を目指している。
代表的な事業がオープンソースの自動運転ソフトウェア「Autoware」の開発・普及で、自動運転システムのOS化・オープン化を推進することで誰もが自動運転開発を効率的に手掛けることができ、性能向上に資する開発の成果なども共有できる環境を構築している。
また、自動運転の実証や社会実装に当たっては、ODD(運行設計領域)を類型化し、各ODDに適したReference Design(参照設計)を示すことで、多岐に及ぶ各交通環境下において必要とされる自動運転の装備が明確になり、実証や実装のハードルを下げることができるとし、実態に即したパターン別の分析なども行っている。
■実証実験の実績と自動運転の普及に向けたアプローチ
ティアフォーの実証実験の実績
ティアフォーはこれまでに、国内18都道府県の約50市区町村でAutoware搭載車両による公開型の実証実験を約70回実施している。
一方、海外でもアジア・アメリカを中心にプレゼンスを拡大しており、アメリカでは既にAutoware搭載車両の実証実験が始まっており、オープンソースソウフトウェアの民主化が広く受け入れら始めているという。
具体的には、アメリカでは米運輸省に属する連邦道路庁が推進する交通システム「CARMA」において、Autowareが自動運転プラットフォームとして採用されているのをはじめ、16社がAutowareを導入している。
中国では8社が導入するほか、同国の自動車技術研究センター(CATARC)が主催する世界的な自動運転カンファレンスで基調講演を実施し、自動運転コンペティションでも完走を収めている。
このほか、エストニアではタリン工科大学が少人数かつ短期間で自動運転車両の構築を達成するのを支援している。
ODDの類型化
ODDは自動運転システムが安全に作動するための前提条件となる領域で、あらかじめ定められたODDの範囲内でのみ自動運転システムが作動するように設計することで、走行時の安全性を担保しやすくなる。
【参考】関連記事としては「自動運転における「ODD」って何?「運行設計領域」のことで、言い換えれば「能力値」」も参照。
ティアフォーは、事業者・ビジネスモデルによる違いを加味しながら、これまでの経験を基に自動運転の技術的難易度に応じてODDを類型化した。
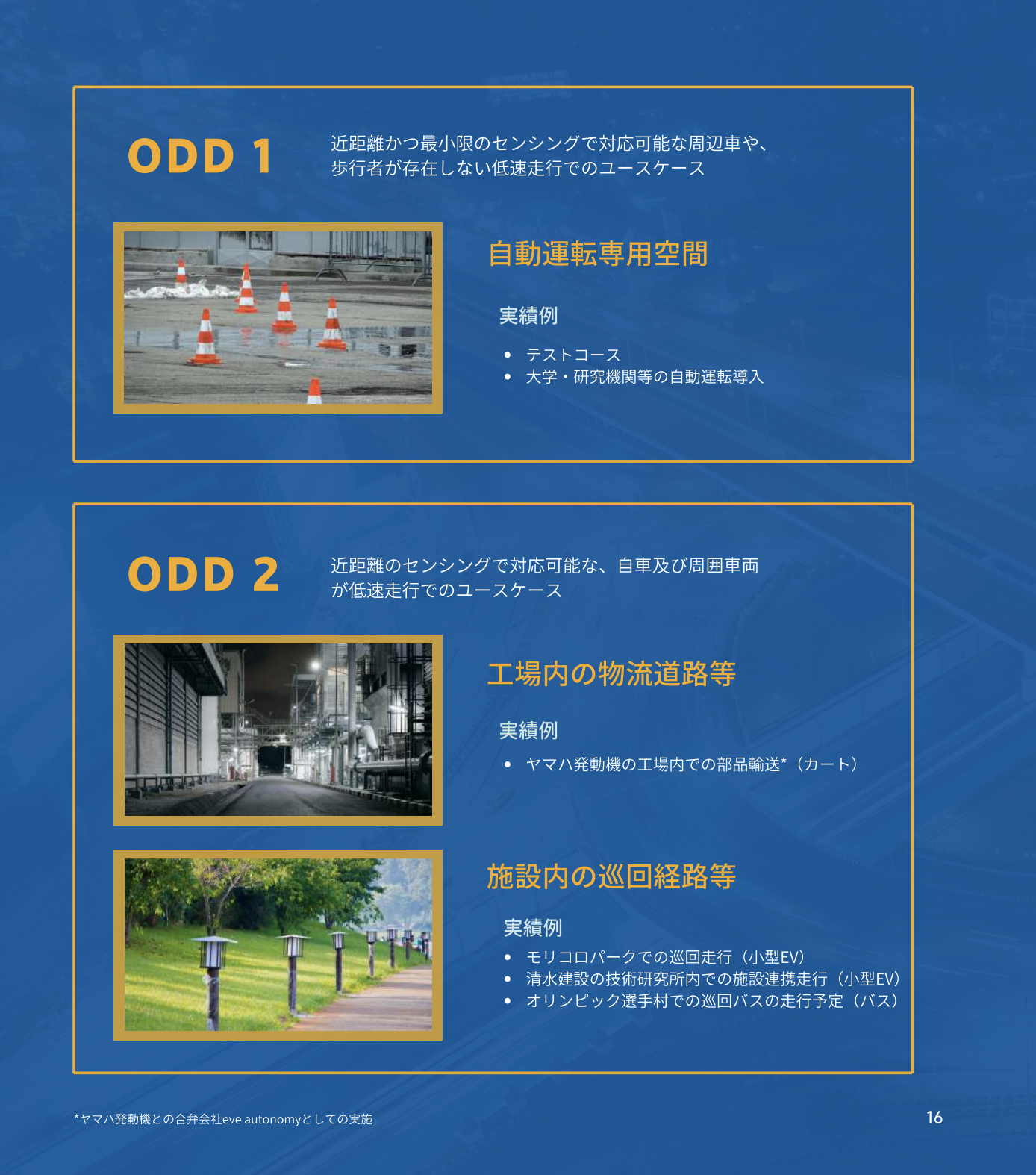
1つ目は「自動運転専用空間」で、近距離かつ最小限のセンシングで対応可能な周辺車両や歩行者が存在しない低速走行でのユースケースを想定している。例としては、テストコースや自動運転の研究開発を行う大学構内の専用空間などが挙げられる。
2つ目は「工場内の物流道路」や「施設内の巡回経路」などで、近距離センシングで対応可能な、自車や周囲車両が低速で走行するユースケースを想定している。工場などの私有地をはじめ、一部公園などもこの部類に入りそうだ。
3つ目は「郊外の巡回経路」や「中山間地域」、「市街地の限定道路」などで、遠距離センシングが必要な中高速走行を含むユースケースを想定している。不特定多数の一般車両や歩行者などが介在する一般エリアの中で、比較的自動運転を実現しやすい環境と言える。

自動運転の導入を計画する地域や企業などが有する環境は二つと同じものは存在しないが、自動運転専用空間か否か、低速走行限定か否かなどパターン化・類型化することで、導入に必要となるシステムなどを把握しやすくなるのだ。
なお、こうした類型化は、自動走行に係る官民協議会でも「地域移動サービスにおける自動運転導入に向けた走行環境条件の設定のパターン化参照モデル(2020年モデル)」が示されている。ティアフォーの類型化も、この参照モデルに対応したものとなっている。
【参考】パターン化参照モデルについては「【資料解説】自動運転の官民協議会、第10回の要点は?パターン化参照モデルとは」も参照。
【資料解説】自動運転の官民協議会、第10回の要点は?パターン化参照モデルとは https://t.co/KYXPY4wWLr @jidountenlab #自動運転 #官民協議会 #要点
— 自動運転ラボ (@jidountenlab) February 13, 2020
Reference Designの提示
自動運転を導入する際、車載ハード機器や高精度3次元地図などの外部データ、サービスプロバイダーが提供するソフトウェアなど、さまざまな周辺機器・ネットワークとの接続が必要となるほか、道路環境に関する各種規制などへの準拠も求められるが、こうした情報を一元化したのが「Reference Design」だ。
各ODDに対応したReference Designを作成・提示することで、それぞれ導入に必要とされるシステムや条件などが明確になり、最適解を得やすくなる。
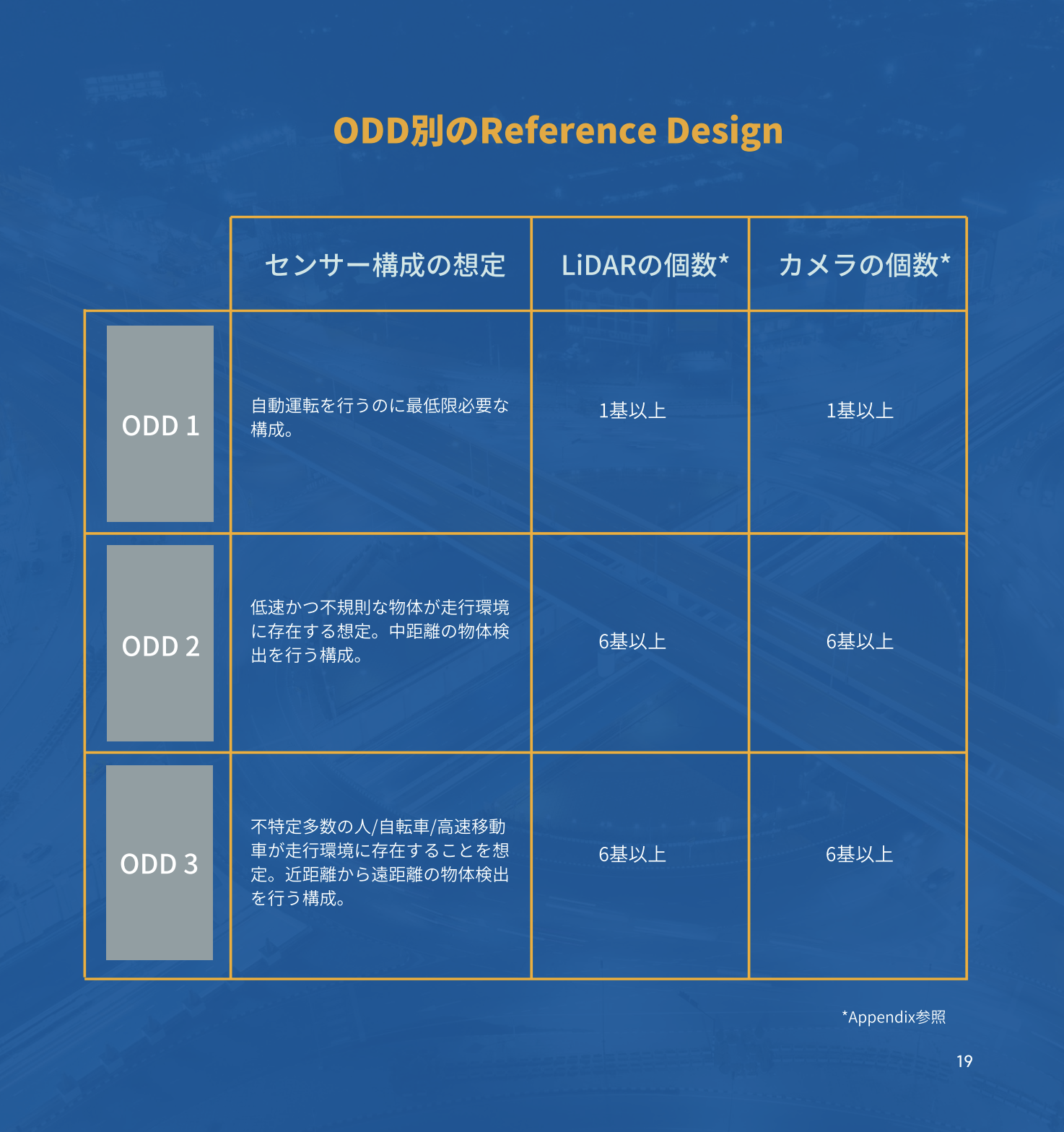
例えばセンサー構成を想定する場合、「自動運転専用空間」では自動運転を行うのに最低限必要な構成としてLiDARとカメラがそれぞれ1基以上、一方、「中山間地域」などでは、不特定多数の歩行者や自転車、高速移動車が走行環境に存在することを想定し、近距離から遠距離の物体検出が可能な構成として、LiDARとカメラがそれぞれ6基以上必要など、こうした情報が共有されていれば、導入に向け初めて実証実験を行う事業者らの参入も容易になるとしている。
実証実験に至るまでのプロセスとインシデント対応
ティアフォーでは、安全性確保のため実証実験に着手するまでに幾重もの安全性確認のプロセスを踏んでいる。バーチャル空間上で予定ルートを走行して安全性を検証するシミュレーションに始まり、専用コースで実車を用いて車両の機能や安全性の確認、ドライバーの訓練を行う閉鎖空間テスト、実際のコース上で想定される危険事象をあらかじめ特定し対策を練る走行コースのリスクアセスメントを行う。
その後、リスク管理委員会が実験計画を審査し、安全性を判断・承認する実験審査を経て、実際のコースを手動運転で走行し、安全対策の充足性やドライバーの適性を再確認するコースの手動及び調整走行を行う――といったプロセスを踏み、天候やコース状態などを確認したうえで実証実験本番を迎える流れだ。
インシデント対応では、実際の事故のみならず事故につながりかねない事象もインシデントとして定義し、危険事象判断やインシデントレポートの発行、リスク管理委員会による判定、対策検討、暫定対策のレビュー、暫定対策、恒久対策といった手順を踏んでいる。
また、走行コースのリスクアセスメントは、交通事故に関する知見が豊富な損保ジャパンと協働し、実験条件や危険事象の洗い出し、リスクレベルの評価など具体的手法の構築に取り組んでいるようだ。
■今後の技術開発
オープンスタンダードによるシステム安全の構築
自動運転システムにはさまざまな機能やサービス、膨大なコード量のソフトウェアなどが必要となるため、通常の自動車と比べその構造は非常に複雑で、システムの安全確保には今まで以上に時間もコストも掛かるため、コストの限界=安全性の限界となってしまう恐れがある。
そのため、各企業が個別に自動運転システムの安全を確保するような対応は非効率で、さまざまなプレーヤーの安全に関する知見を集約することが鍵になる。
こうした仕組みの実現には、特定企業の縛りを受けないオープンスタンダードによる水平分業化が必要となるため、ティアフォーはAutowareを中心としたエコシステムを構築することで、国際標準に準拠したシステム安全の実現を目指しているのだ。
実証実験で見えてきた技術的な課題
先の項でODDの類型化に触れたが、実際の自動運転走行時のODD設定においては、交通や道路状況、車両、天候、地形、時間帯など、極めて多くの要素が含まれるため、ODDは類型化するだけでは不十分であり、必要な要素を詳細化し、対応範囲を広げるためにハード・ソフトの機能改善も必要となる。
また、さまざまな環境・車両に対応したReference Designの提示がAutowareの普及を加速させるが、そのために必要となるのが多様な経験や知見のさらなる蓄積で、蓄積された知見を基にODD類型やReference Designの拡充を進めるとともに、業界各社の知見をオープンに集約・共有できるような仕組み作りについても検討していくとしている。
Autowareの機能追加や改善の観点では、産学連携体制で「認知・予測」と「判断」の精度向上を図っていく方針だ。
自動運転システムの機能である「認知・予測」「判断」「操作」のうち、「認知・予測」と「判断」の精度が機能全体の良し悪しに直結し、精度向上にはAIに関するさらなる研究が必要となるが、日本では研究者が不足しているため大学との連携が不可欠であり、また自動運転システムの開発には、AI・ソフトウェアエンジニアリング・自動車工学などさまざまな専門家が集結する必要があるとしている。
このほか、Fail Safe(フェールセーフ)機能の強化にも触れている。システムエラーが発生した際の危険通知や既知の危険事象に対するフェールセーフ機能の拡充は今後も当然必要で、さまざまなODD下における走行について、一部はシミュレーターで確認することができる。
一般的なユースケースに関しては、2016~2019年にドイツで行われたPEGASUSプロジェクトの手法の活躍が期待でき、日本でも同様の取り組みとして2018年からSAKURAプロジェクトが始まっており、日本の道路環境に適したローカルな手法やユースケースの活用が期待できるとしている。
■今後の事業と社会環境整備
実証実験で見えてきた事業及び社会環境の課題として、日本では海外のように多数車両による実証実験が行われていない現状を指摘している。
日本では、は地方自治体を中心にした小規模・短期間の実証が多いが、米国では、1社ごとの実験エリアや車両種別は限定的なものの、80社以上の企業が37州の公道で長期間にわたって実証を行っており、2019年6月時点の実証車両台数は計1400台を超えて、走行データの蓄積が進んでいるという。
自動運転技術の実用化を加速するためには各社個別の取り組みを超えた共通の環境整備が必要で、シミュレーションの標準化や検証時のオープンな安全判断基準の確立や、合理的な運用基準の策定、社会的補償手段としての保険制度の策定などを進め、体制や環境を整備すべきとしている。
■【まとめ】協調領域拡大で業界全体の開発スピードを加速
自動運転の民主化という表現が心に響き渡る。ビジネス上、開発企業にとって自動運転技術やそれに付随する知見は競争領域であるのが当然だが、社会全体の最適化を考えた場合、協調領域に置き換え開発を推進したほうが間違いなく開発効率が上がり、社会実装も早期に実現することが想定される。
事実、近年ではデータセットのオープン化を図る取り組みも進んでおり、業界全体の開発スピードを加速する動きが強まっているようにも思える。
競争領域をすべて放棄する必要はないが、自動運転社会の早期実現に向け、改めて協調領域とのバランスを精査すべき時期が到来したのかもしれない。それが自動運転の民主化への第一歩となる。
【参考】データセットのオープン化については「自動運転業界、「データセット公開」に乗り出す企業たち(深掘り!自動運転×データ 第27回)」も参照。
とは?搭載する自動車の車種は?自動運転ではない?")



の自動車保険を比較!")


の意味・定義・読み方は?自動車業界の新潮流を示す")
ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

