


東京2020パラリンピックの選手村で運行中のトヨタのMaaS専用次世代EV(電気自動車)「e-Palette(イーパレット)」が、交差点で選手と接触する事故が発生した。自動運転車の事故ということもあり、世間の注目が一気に高まった。
ただ、事故発生状況などを精査すると、自動運転システムそのものに欠陥があったかどうかについてももちろんしっかりと調査する必要があるが、事故の主原因はオペレーションにあった可能性が高いようだ。この記事では、自動運転実証におけるヒューマンエラーに焦点を当て、その対策に迫っていく。
【参考】関連記事としては「トヨタのe-Palette(イーパレット)とは?自動運転EV、東京オリンピックでは接触事故も」も参照。
記事の目次
■接触事故の概要
事故発生時の状況:五輪選手村内の交差点で発生
事故はパラリンピック開催期間中の2021年8月26日、選手村内の交差点で発生した。e-Paletteが信号機のない丁字の交差点で右折する際、視覚障がいを持つ選手と接触した。報道によるとe-Paletteには当時オペレーター2人と乗員5人が乗車しており、実質自動運転レベル2の状態で走行していたものと思われる。
トヨタの説明によると、e-Paletteが交差点に差し掛かった際、センサーが人を感知したため一度停止した。オペレーターは安全を確認した上で再度発進し、交差点周辺の状況を確認し手動で減速を開始したという。
道路を横断してきた歩行者をセンサーが検知し改めて自動ブレーキが作動し、オペレーターも緊急ブレーキを作動させたものの、車両が完全に停止する前に車両と歩行者が接触した。
事故後、トヨタはただちにe-Paletteの全面運行を停止し、検証を進めるとともに組織委員会と再発防止に向けた検討に着手した。
▼東京2020パラリンピック競技大会選手村におけるe-Paletteの運行再開と安全対策について
https://global.toyota/jp/newsroom/corporate/35956133.html
e-Paletteの概要や誘導員の配置状況は?
e-Paletteは自動運転レベル4(高度運転自動化)を実現する車両で、基本的には通常のステアリングやアクセルなどのペダル類を備えていない。今回の車両にはジョイスティックで操作する制御システムを搭載しており、加速・減速といった縦方向の制御をジョイスティックのレバーで操作し、ステアリング操作にあたる横方向の制御は自動運転システムが担っていた。
また、安全確保に向け道路周辺に計6人の誘導員を配置しており、事故が起こった交差点には2人が配置されていた。
なお報道によれば、ジョイスティックの設置場所の都合上、これを操作するオペレーターからは死角が発生していたことなども報じられている。
事故の検証と今後の対策
トヨタは、選手村内における安心・安全な交通流は、歩行者、車両、誘導員を含むインフラの3要素で構成されているとし、今回の事案に対しこの3要素の観点から発生状況を分析した。
検証の結果、信号がなく、特にパラリンピックのような多様な人がいる状況においては、誘導員が複数方向からの歩行者や車両の動向を確認できる環境になく、また、誘導員とオペレーター間の連携の仕組みも不十分だったという。
三位一体で仕組みの改善に取り組む必要があると判断し、車両においては、自動運転システムを使用していた加減速や停止の制御もマニュアル化するほか、接近通報音の音量アップや搭乗員の増員を図ることとした。接近通報音は、エンジンを搭載しないEVならではの静音性対策だ。
誘導員を含むインフラにおいては、交差点の誘導員を6人から20人体制に増員し、強化を図る。また、オリンピックと同様に進めていた運営においても、パラリンピックの特徴である多様な歩行者に合わせた教育を行い、信号の代わりとなり、車両・歩行者を安全に誘導できる体制を構築していく。
歩行者に対しては、組織委員会が選手団長会議などにおいて選手村内の歩行環境や移動時のルールなどを改めて周知していく。
これらの対策を講じ、現場で対応にあたる人員への教育やテスト走行を実施した上で、8月31日に運行再開することを組織委員会が決定しており、閉会まで改善を積み重ね、安全確保に向けレベルアップを図っていく方針としている。
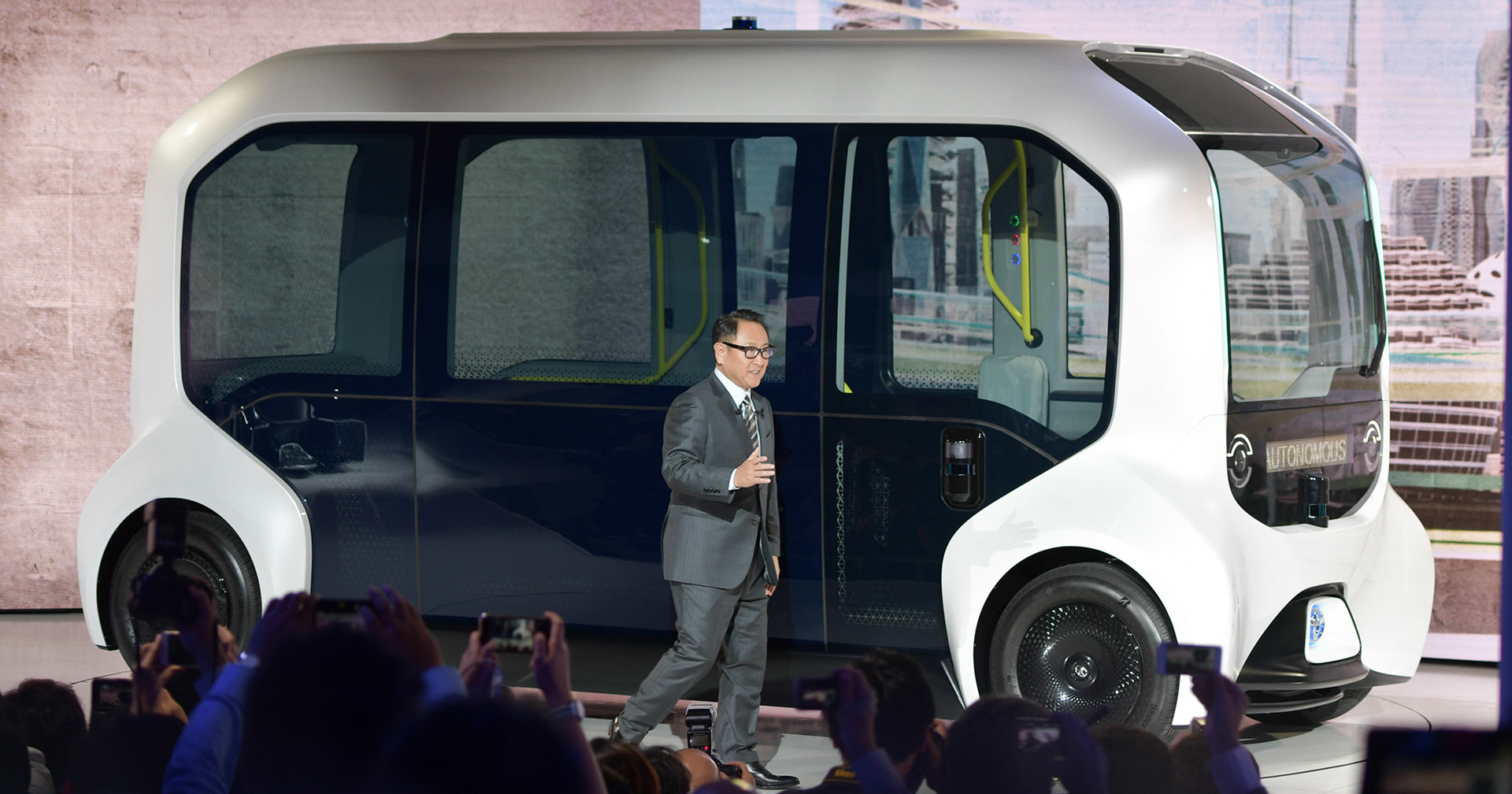
■豊田章男社長が事故翌日に語ったこと
事故発生翌日の8月27日、豊田章男社長は自社メディア「トヨタイムズ放送部」に急遽出演し、謝罪や事故状況の速報を行うとともに、自動運転に対する考え方を披露した。
事故発生後、連絡を受けた豊田社長は急遽選手村に駆け付け、関係者から話を聞いた。豊田社長は「現場は歩道もついていて、誘導員やオペレーターが安全を確保していた。e-Paletteは自動運転とマニュアル走行を交互にできる仕組みで、交差点では横断歩道の前で一度停止した。オペレーターや誘導員がOKを出し、オペレーターがジョイスティックのレバーを前に出した瞬間に接触したと聞いた。その時の映像もあるが、捜査中であることと誤解を招かないため公開はできない。情報共有し、事故の原因の調査を進めているところ」と話した。
また、進行役から自動運転における過信や限界に関する見解を尋ねられた豊田社長は、「私自身がドライバーであり、自動運転と自分の運転をいつも戦わせている。自動運転のレベルはまだ私の運転レベルには到達していないが、初心者が初めて運転するのと比べると上手い方。これが今の自動運転の実力」と評し、「我々は自動運転開発を、交通死亡事故をゼロにする目的で一貫している。技術開発競争にはできる限り乗らないようにしている。今回も、自動運転車が横断歩道で止まった際、通常は自動運転でスタートするところ、あえてマニュアルでスタートしていたが、パラリンピックの特殊な環境に対応できなかった」と話した。
その上で「自動運転にはまだルールがない。車だけ安全にすればよいわけではなく、インフラと使う側、車を作る側が三位一体で進めていかなければならない。ルールメイキングも現実合った形でやっていかなければならない。そういう議論が必要」と総括した。
豊田社長が出演したトヨタイムズ放送部の動画は以下だ。2分過ぎから15分過ぎまで豊田社長が出演している。
■自動運転におけるヒューマンエラー
前述の通り、今回の事故原因は現在のところは、いわゆるヒューマンエラーに起因するものみられている。
自動運転、特に実証においては、こうしたヒューマンエラー対策も重要となる。ドライバーが介在する余地がなくなる自動運転レベル5(完全自動運転)が実現しない限り、何らかの形で「人間の判断」を要する場面が出てくるのだ。
ODD(運行設計領域)内で自動運転を実現するレベル4においては、基本的に自動運転システムがすべての制御・判断を行い自律した走行を行う。万が一の際もシステムが判断を下し、安全に車両を停止させる機能を搭載している。
ただ、こうしたレベル4においても、人間が介在する場面はゼロにはならない。予測外の状況下において遠隔制御を必要とする場面は必ず出てくる。そもそも、日々のメンテナンスやソフトウェアの設定などにおいて、人間の手を要する場面は多くを占めることになる。
こうしたことを考慮すると仮に「手動運転モード」であっても、そのヒューマンエラーでさえもシステムが検知して、緊急停止させたりスタートさせなかったりと自動制御できるようになるのが、理想的で正しい姿かもしれない。
【参考】関連記事としては「自動運転における「ODD」って何?「運行設計領域」のことで、言い換えれば「能力値」」も参照。
実証においてはなおさらだ。現状、国内のレベル4実証はセーフティドライバーの同乗、あるいは遠隔監視・制御が常時求められている。仮にレベル4を実現可能な法環境が整った後も、レベル4の実証である限り、何らかの形でオペレーターが中止し、必要に応じていつでも介在する準備を整えておかなければならない。
自動運転実証においては、セーフティドライバーや遠隔監視者、ハードウェア・ソフトウェアのメンテナンス担当者、実証現場の責任者など、多くのオペレーターが存在する。各オペレーターが担う個々のタスクはもちろん、オペレーター間でしっかり情報や運行ルールなどを共有する体制も求められる。
このオペレーションにおいて、人間の判断によるミスをどのように減らしていくも非常に重要なポイントとなるのだ。
【参考】関連記事としては「自動運転レベルとは?レベル0〜レベル5の定義・呼称を徹底解説」も参照。
★情報更新いたしました★自動運転レベルとは?定義や違いは?徹底まとめ https://t.co/B7vwnOlAbg @jidountenlab #自動運転 #自動運転レベル #まとめ
— 自動運転ラボ (@jidountenlab) February 3, 2021
■ヒューマンエラーに起因する自動運転の事案
中型自動運転バスの実証実験での接触事案
ヒューマンエラーに起因する自動運転の事故・事案としては、国内では2020年12月、茨城県日立市内のひたちBRT路線で行われた中型自動運転バスの実証実験で、バスがガードレールに接触する事案が起きている。
自動運転バスが時速30キロで直進区間を自動走行している際、急にハンドルが旋回し、バスの右前方部分がガードレールに接触した。運転手は速やかに手動介入したが間に合わなかった。
原因は、車両の位置推定機器の再起動忘れという。位置推定を行うGNSS(衛星測位システム)方式と磁気マーカー方式の2つの機器が上手く切り替わらず、道路での車両の位置や方向に関する情報が更新されなかったことにより、ハンドルが急旋回したという。この案件はオペレーション上のミスに分類される。
【参考】関連記事としては「自動運転バスの接触事案、位置推定機器の再起動漏れが要因」も参照。
自動運転バスの接触事案、位置推定機器の再起動漏れが要因 https://t.co/rTLA8x3OUl @jidountenlab #自動運転 #バス #事故 #要因
— 自動運転ラボ (@jidountenlab) December 30, 2020
東京都における「NAVYA ARMA」の走行実証でも
このほか、セーフティドライバーに迅速かつ的確な判断が求められるケースが目立つ。東京都内で2020年3月に実施された「NAVYA ARMA」の走行実証において、車両をバス停に停車する際、路上駐車の乗用車に接触する事案が起きた。
自動走行中のバスを停車させる際、運転者は駐車車両への接近を認知し、手動走行への切り替えを行ない、これとほぼ同時に車両に搭載されたLiDARも駐車車両を検知したが、手動走行のためシステムによるブレーキが無効になったという。
【参考】関連記事としては「ソフトバンク子会社の自動運転バス、都内で物損事故 手動走行へ切り替え後に」も参照。
ソフトバンク子会社の自動運転バス、都内で物損事故 手動走行へ切り替え後に https://t.co/5jZDrlo5JF @jidountenlab #ソフトバンク #自動運転 #事故
— 自動運転ラボ (@jidountenlab) March 26, 2020
滋賀県大津市でも歩道柵の支柱部分への接触事案
一方、2020年8月に滋賀県大津市内で行われた中型自動運転バスの実証実験でも、車両Uターンのため右旋回する際、車体左前のセンサーカバーが歩道柵の支柱部分に接触する事案が発生している。
転回中は時速4キロ以下の極低速で自動運転を行っていたが、転回が完了する前に歩道柵との間隔が狭くなると運転手が判断し、手動運転に切り替えた。運転手は自らの操作で転回するため前進したが、結果として歩道柵に接触したという。
自動運転実証においては、セーフティドライバーによるとっさの判断で手動運転に切り替えられる場面が思いのほか多い。多くの場合、切り替えにより問題なく走行を継続しているが、際どい判断に迫られるケースや一瞬の油断を生むケースが発生するのもある意味自動車走行の常であり、こうした状況をいかに未然防止するかがオペレーションとして問われることになる。
【参考】関連記事としては「中型自動運転バス、実証中に柵の支柱と接触 産総研が発表、ケガ人なし」も参照。
中型自動運転バス、実証中に柵の支柱と接触 産総研が発表、ケガ人なし https://t.co/UW7Ku8uhwk @jidountenlab #自動運転 #実証実験 #産総研
— 自動運転ラボ (@jidountenlab) September 5, 2020
■【まとめ】ヒューマンエラー対策は必要不可欠
海外では、高度なレベル2車両による事故案件が目立つ。自動運転ではなくあくまでADAS(先進運転支援システム)だが、システムを過信したオーナーが事故を引き起こすケースは今後増加する可能性がある。普及が始まったレベル3においても同様のことが言えそうだ。
豊田社長が示したインフラと車両を使う側、車を作る側が三位一体で安全を確保するルール作りの必要性は、こうしたレベル2の事故にも当てはまる。自家用車における高度ADASやレベル3においては、ドライバーも正しい知識やルールのもと走行しなければならない。
また、レベル4実用化後においては、一般ドライバーや歩行者らも巻き込んだルール作りが必要となる。創成期における自動運転車は絶対的に安全なものではない。比較的低速走行ゆえあおり運転や無理な追い越しが発生する懸念は拭えず、歩行者や自転車ドライバーも「自動運転だから止まってくれる」といった過信のもと、自動運転車に近づくことを怖がらなくなる可能性もある。
話が逸れたが、創成期における自動運転にヒューマンエラーは付きものだ。だからこそ、開発・実用化にあたるスタッフは他社の事案なども踏まえたうえでエラーの一つひとつをしっかりと潰していく体制を構築しなければならないし、実用化を見据え歩行者をはじめとした交通関係者が共有すべきルール作りも進めていかなければならないのだ。
【参考】自動運転車の事故事例については「自動運転車の事故まとめ UberやTeslaの死亡事故、日本の事例も解説」も参照。







の意味・読み方は?自動車業界の新潮流を示す")
ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

