


近年、AIの進化により自動運転開発のトレンドが変わり始めているようだ。これまではルールベースに基づくAI開発が中心だったが、より汎用性とポテンシャルの高いE2E(エンドツーエンド)モデルによる一体的開発に着手する事業者が増えてきた。
自動運転開発におけるルールベースとE2Eとはそもそも何なのか。両者の概要や開発動向について解説していく。
最新性能の車を手軽に試したいならカーリース「リースナブル」を利用するのがおすすめだ。新車は月額6,600円~と低価格で提供されており、途中解約も可能だ。
リースナブルに仮審査を申し込む


(PR)
\最短30秒で無料診断できる! /

■自動運転は認知・判断・制御をコンピュータ化
自動運転は、認知・判断・制御をコンピュータ化することで成り立つ。カメラなどのセンサーが車両周囲の状況を把握し、他の車両や歩行者、道路標識などさまざまなオブジェクト(物体)を認知する。
この情報をもとに、AIが自車両を安全に走行させるためにどのような制御をすべきかを判断し、その制御命令に従ってコンピュータが車両の前後左右の動きを機械である自動車に伝達する。
この一連の仕組みは、基本的にルールベースもE2Eも同じだ。センサーが目の役割を担い、AIが脳となって判断を下すのだ。では、何が異なるのか。それは、各プロセスにおけるAI開発の手法・考え方だ。
以下、国土交通省や防衛省が公開している資料なども参考にしつつ、解説していく。
▼自動運転の実現に向けたインフラ連携の取組について|国土交通省
https://www.mlit.go.jp/road/ir/ir-council/jido-infra/pdf03/01.pdf
▼生成AIが切り開く次世代自動運転技術|防衛装備庁技術シンポジウム2024
https://www.mod.go.jp/atla/research/ats2024/pdf_oral_matl/1112_1550_ss11.pdf
■ルールベース
エンジニアが一つひとつの定義(ルール)をAIに付与
ルールベースにおけるAI開発では、AIを学習させる過程で、「赤信号は止まる」「センターラインをはみ出さない」などの交通ルールを一つひとつ教えていく。エンジニアが判断材料を一つひとつ定義し、それに基づいて状況に応じた判断をAIが下す仕組みだ。
判断基準が示されるため、このアプローチは確実性が高い一方、改善に向け順次細かな判断基準も付与していかなければならない。例えば、センターライン(中央線)からのはみだしだ。
黄色い実線で引かれたセンターライン(規制表示)は、追い越しのためにその右側へはみ出して通行することが禁止されている。白色の実線で引かれたセンターラインは、幅員6メートル以上であれば原則その右側へはみ出して通行することができない。一方、白色の破線のセンターラインは、追い越しを含め必要な際にはみ出して通行することができる。黄色の実線と白色の破線が両方付された道路では、白色の破線側からのはみ出しは認められている。
人間でも、この時点で正確に把握できていないドライバーは相当数存在しそうだが、このようにルールが明確化されている分にはそれほど苦労はない。しかし、現実問題として、はみ出し禁止の状況でもはみ出さなければ走行できないケースは少なくない。イレギュラーな場面は多々存在する。
例えば、片側幅員6メートルの道路で、大きな車両が左にやや余白を設けて駐停車しているケースだ。安全な距離を保ちつつかわすためには、中央線を踏む、あるいは少しはみ出さなければならない。
一般車両の大半は、対向車両の状況を踏まえつつ当たり前のように少しはみ出して走行する。しかし、自動運転車の場合、このような場面でも中央線をはみ出さないよう待機してしまうことが考えられる。かえって交通の障害となり、後ろからの無理な追い越しで事故を誘発する可能性も考えられるだろう。
警察が黙認するレベルの軽微な違反であれば、道路交通法に若干抵触したとしても、道路交通最適化のため柔軟な運行を選択すべき場面はいろいろと考えられる。
横断歩道における対応も然りだ。横断歩道脇に歩行者がいるものの、渡るそぶりを見せない場合、どうするか。自転車(軽車両)の場合はどうするか。人間のドライバーでも迷う場面は少なくない。
しかし、ルールベースの場合、こうした判断材料を事細かく指示しなければAIは対応できないのだ。各シナリオに対応した明確な行動指針のもと、AIが都度状況を把握して自動車を制御するためだ。試験走行で得られた情報をエンジニアがフィードバックし、機械学習によって同一状況に対応できるようシステムの訓練を重ねていく。
現実世界の道路交通にはイレギュラーな場面が多々存在するが、その対処法をいちいち指示して学ばせないとならないのがルールベースの弱みと言える。解決するには、発生頻度が限りなく低いレアなシチュエーションを含め、無尽とも言えるイレギュラーな場面を一つひとつ定義し、AIに学習させていかなければならないのだ。
自動運転の走行可能エリアを新規エリアに拡大する際も、そのエリア特有のポイントを一つひとつクリアしていく工程が必要となる。
判断・制御に対する根拠が明確に定義されているため、トラブルがあった際の原因究明が比較的容易で、改善しやすい点もあるが、エンジニアにかかる労力も半端ではないのだ。
モデルはモジュール式
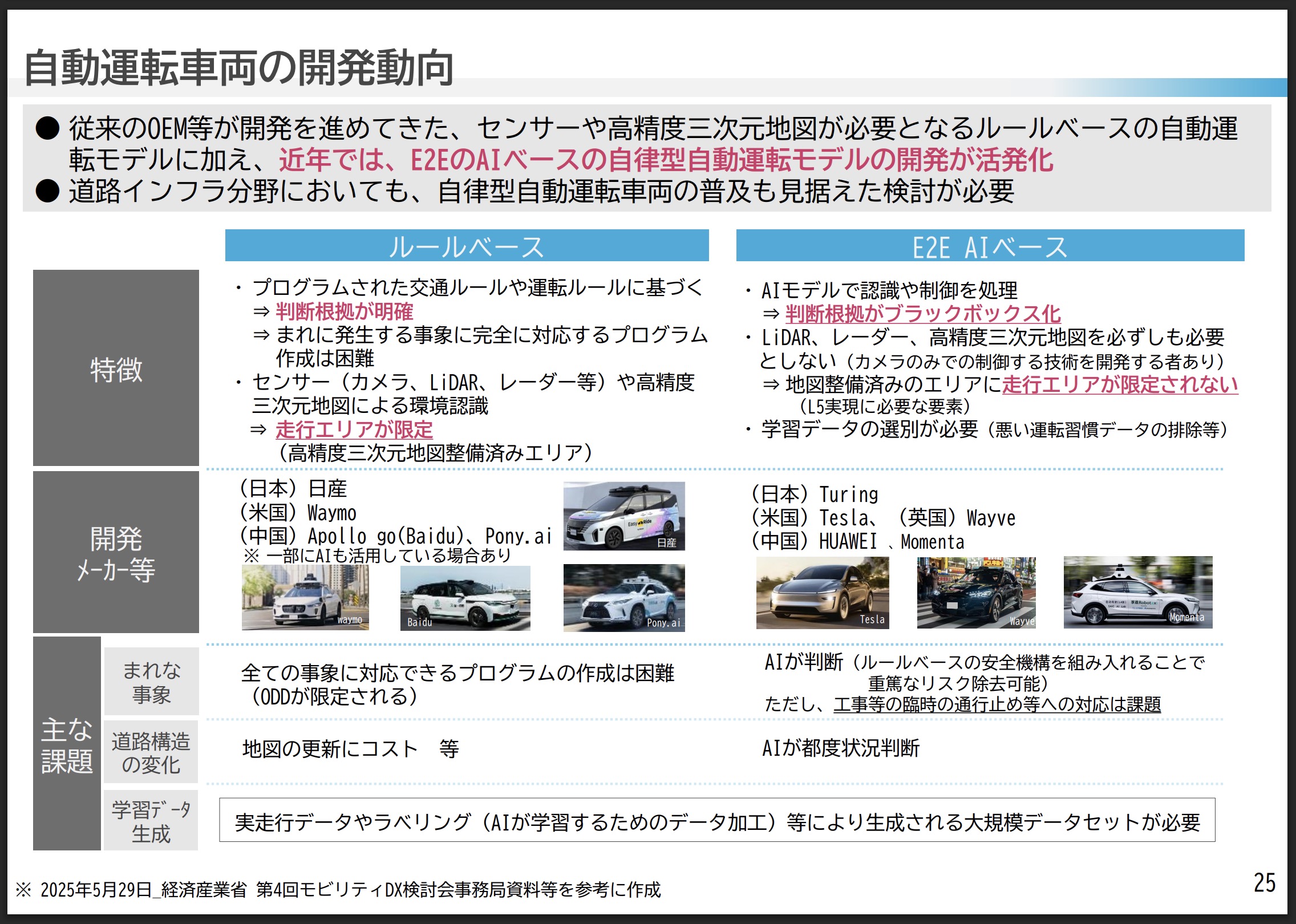
ルールベースのもう一つの特徴は、認知や判断といった各機能を別々のモデルで処理している点だ。例えば、センサーにカメラとLiDARを併用していれば、それぞれに認識モデルを適用する。高精度3次元地図を用いていれば、これも一つのモデルを使用する。
これらの入力情報を統合し、ルールベースに基づくモデルで判断を下す。認識や予測、経路計画といった各工程がモジュール化され、ルールベースによって設計されたモデルがそれぞれ機能しているイメージだ。
■E2Eベース
各工程を一体的に処理する
一方、E2Eモデルは、認知から制御に至る一連の流れを単一モデルで処理するのが特徴だ。センサーから得られる車両周囲の情報をE2Eモデルで処理し、そのまま直接制御指示を出力する形で、認識から制御に至るまでを一連の流れとして作用させる人間の運転行動に近いプロセスと言われる。これが「E2E=端から端まで」の由来だ。
大規模なニューラルネットワークが、センサー情報をもとに一体的に計算・判断し、直接出力を行うのだ。自動運転システム全体としてはシンプルな構成となり、より高速な処理が可能となる。
細かな定義付けも不要、レベル5への道を切り拓く
AIの学習過程も基本的に異なる。E2Eモデルは、エンジニアが細かく定義付けすることなく、大量の学習データをもとにAIが運転に必要な技能を身に着けていくのだ。人の手を介さずにさまざまな状況に対応した答えをAIが自ら導き出そうとするため、レアケースと言えるより細かなシナリオにもアプローチしやすい。拡張性・汎用性が高いのだ。
つまり、イレギュラーな状況にも対応できる可能性を秘めているのだ。人間が定義付けするルールベースは人間を超えることが基本的にできないが、E2Eモデルは人間の判断能力を超える可能性を秘めている。これは、走行エリアや道路環境などを問わず原則どこでも自動運転可能なレベル5への道とも言える。
▼AIを利⽤した完全⾃動運転の実現|Turing
https://www.mlit.go.jp/road/ir/ir-council/jido-infra/pdf03/04.pdf
生成AIの登場でE2E開発が急加速
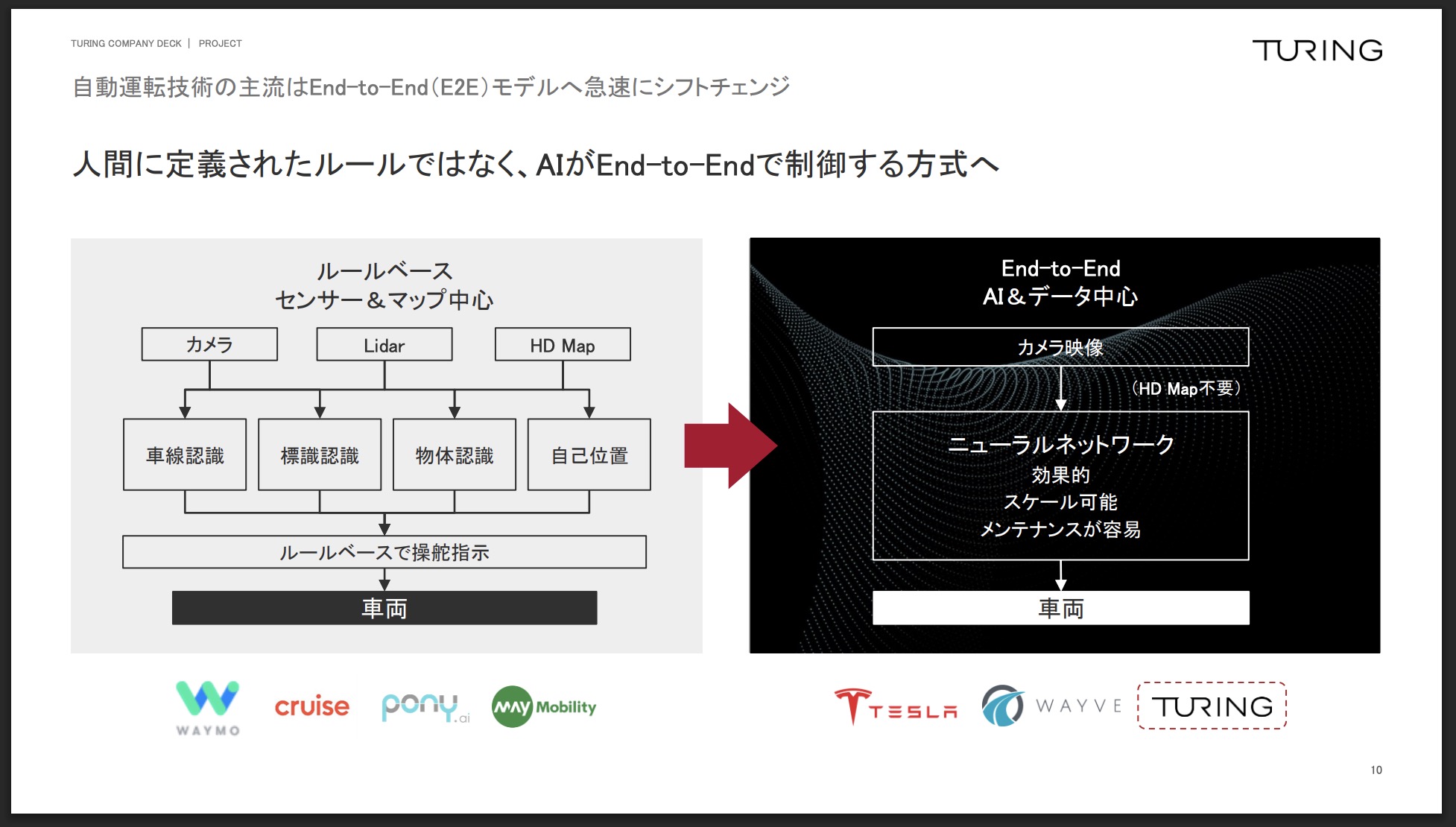
このE2Eモデルへの注目が一気に高まったのは、2020年以降だ。ディープラーニングの登場でAI開発が進化し、2010年代に入って自動運転開発が急加速したが、Waymoをはじめとする先行勢はルールベースを主流としていたため、多くはレベル5の実現に懐疑的だった。イレギュラーなケースを網羅しきれないためだ。
しかし2020年代に入り、ChatGPTに代表される生成AIが表舞台に登場し、開発が一気に加速した。この波は当然自動運転業界にも波及し、中国勢を中心にE2Eモデルの開発が盛り上がってきたのだ。
では、レベル5の実現を視野に収めるE2Eモデルが現在主流になったのか?と言えば、まだその段階には至っていない。
E2E開発には、より膨大な量のデータが必要である点や高い処理能力が求められる点、判断根拠の不透明さ、ハルシネーションの問題などが内在するためだ。
AIが自ら学習するということは、どういったロジックでその判断を下したのかが人間にはわかりづらく、ブラックボックス化しやすい。万が一事故が発生した際、その要因を解析しきれず説明責任を果たせないケースが出てくる恐れもある。間違った情報を生成・出力するハルシネーション対策も当然必須となる。
また、開発初期時点ではルールベースに比べ実用化しづらい点も指摘できる。開発初期はどうしても学習が浅くなるため、人間が定義付けするルールベースに比べ自動運転の精度を高めにくいのだ。学習が深まるにつれ一気にルールベースを追い越すことが期待できるが、早期実用化を目指す事業者にとってはリターン獲得までの道のりが遠いものとなる。
将来性は認められるものの、より高度なAI開発技術と長期視点が求められるだけに、おいそれと手を出せないケースもあるようだ。
■自動運転開発事業者の動向
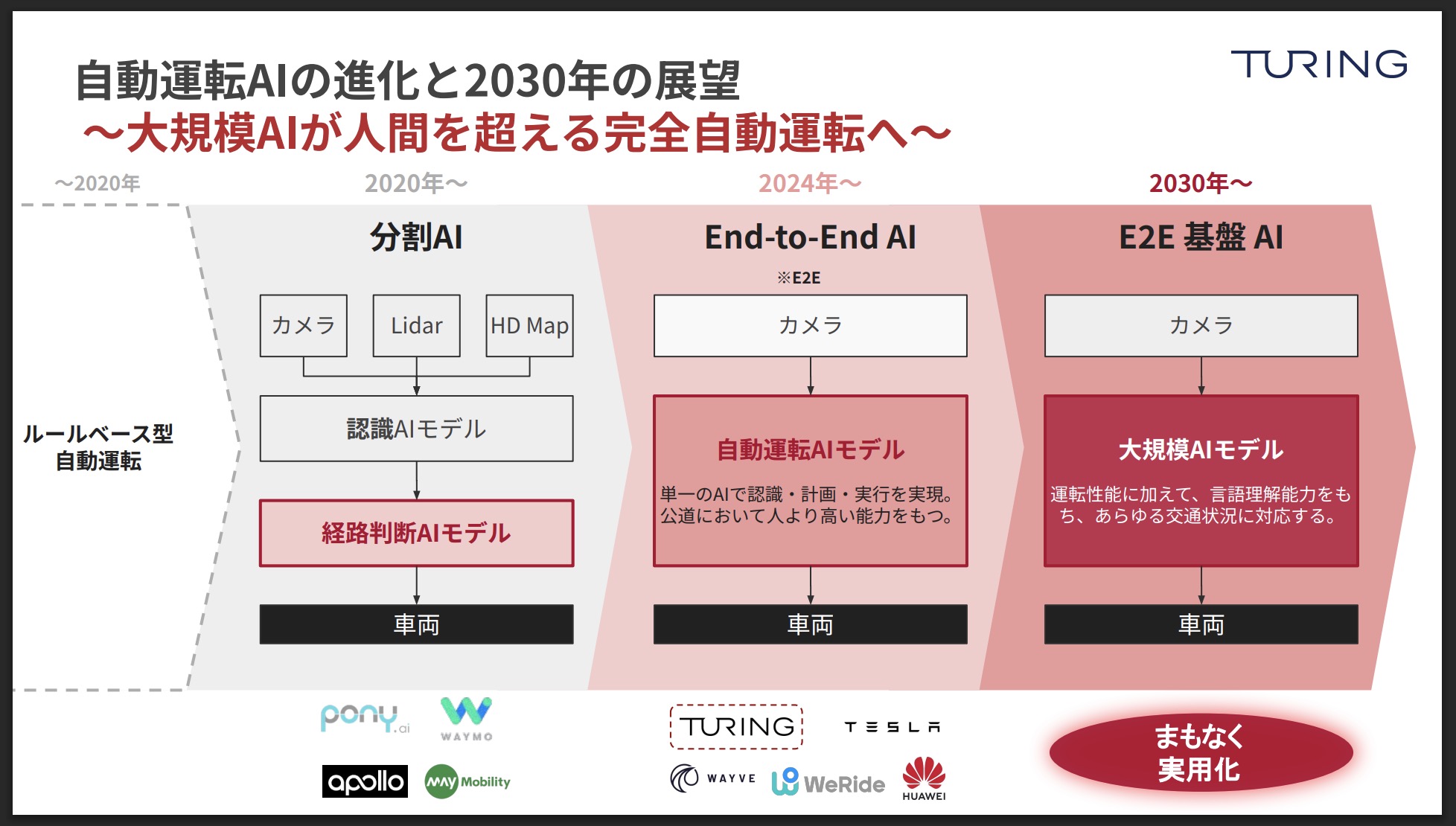
ルールベースからE2Eへの移行がトレンドに
Waymoをはじめとする、自動運転サービス実用化組のほぼすべてがルールベースに基づく自動運転開発を行っている。事業停止したCruiseや、中国の百度やWeRide、Pony.aiなど、自動運転タクシーを実用化した事業者はもれなくルールベースモデルの開発を進めていた。これまでの自動運転業界では、ルールベースがスタンダードな開発アプローチだったのだ。
ただ、E2E開発に本格着手する例も出てきた。グーグル系Waymoは2024年10月、マルチモーダル大規模言語モデルGeminiを搭載した自動運転向けE2Eモデル「EMMA」の詳細情報を発表した。
統合されたE2Eの学習済みモデルを用いて、センサーデータから直接自動運転車の将来の軌道を生成する。自動運転向けに特別に学習・微調整されたEMMAは、Geminiの広範な世界知識を活用して道路上の複雑なシナリオをより深く理解するという。
グーグルは生成AI開発競争に身を投じており、当然のように自動運転開発分野にもその成果を生かしていく構えなのだろう。
おそらく、既存開発事業者の多くがWaymo同様E2Eモデルの開発を模索しているものと思われる。生成AIの開発能力がカギを握るため、AI事業者とのパートナーシップなどが今後加速していく可能性も考えられそうだ。
日本では、ティアフォーもE2Eモデルの開発に着手している。同社の自動運転ソフトウェアはルールベースに基づいて開発され、近年レベル4を実現する域に達したが、2024年10月に東京大学大学院工学系研究科松尾・岩澤研究室の研究成果の社会実装を担う松尾研究所とともに生成AI開発を開始したと発表した。
大量の走行データを学習して実世界の運転行動の常識を模倣できる大規模世界モデルを構築することでE2Eを実現するとしている。
2025年7月には、レベル4+向けのE2EアーキテクチャをAutowareのレポジトリを通じて公開した。未経験のシナリオに対しても人間の介入が不要なレベル4+の実現を目指し、2026年春ごろを目途に全国50カ所で展開予定の自動運転移動サービスにおいて、このアーキテクチャを段階的に導入して有効性を実証していくという。
▼ティアフォー、自動運転レベル4+向けE2Eアーキテクチャを公開|ティアフォー
https://tier4.jp/media/detail/?sys_id=1quCnNijMhxHJAVhT7HgAj&category=NEWS
代表格のテスラはE2Eモデルを2023年に実装
一方、早くからE2Eモデルに注目していた企業も少なからず存在する。その代表格として有名なのがテスラだ。
ただし、テスラがE2Eモデルの本格導入を開始したのは2023年に実装を開始したFSD「Version 12」からだ。自動運転ソフトウェアを全面刷新し、E2Eモデルに切り替えた。レベルとしてはADASだが、実装面で世界を先行している。
その成果かは不明だが、FSDの進化は加速しているようで、2025年6月に一般FSDとは別バージョンであるものの自動運転タクシーサービスに着手している。
海外勢ではこのほか、英WayveやカナダのWaabi、中国のMomentaやDeeproute.aiあたりがE2E開発に力を入れている。XPengやHuawei、Li Autoといった新興EVメーカーもADAS開発にE2Eモデルを採用しており、将来の自動運転化を目論んでいる。
国内ではTuringが先行
日本国内ではTuringが先行している。「テスラ超え」を標榜する同社は、2021年の設立時からカメラとAI技術による完全自動運転の実現を目指しており、2023年にマルチモーダル生成AI・Heron、2024年に日本発の世界モデル・Terraをそれぞれ発表している。
【参考】Turingについては「自動運転で打倒テスラ掲げるTuring、ナスダック上場か?検索回数が67倍に急増」も参照。
■ルールベースとE2Eに関するよくある質問(QA)
さいごに改めて、ルールベースとE2Eに関するよくある質問を確認しよう。
Q. ルールベースのメリット・デメリットは?
メリット: 動作の根拠が明確(説明責任が果たしやすい)で、特定の状況下で確実な動作を担保できる。
デメリット: 「雨の日の乱反射」や「予測不能な歩行者の動き」など、現実世界の複雑なパターンすべてを網羅するのは不可能という限界がある。
Q. E2Eモデルのメリット・デメリットは?
メリット: ルールベースでは記述しきれない曖昧な状況(複雑な交差点や人の意図の読み取りなど)に対して、より人間らしくスムーズに対応できる可能性がある。
デメリット: AIが「なぜその操作をしたのか」というブラックボックス問題が発生しやすく、安全性の検証がルールベースよりも難解になる。
Q.E2Eモデルだけでレベル5の実現は可能?
現在、判断はE2E、監視はルールベースなど、「純粋なE2E」だけでレベル5を目指すのではなく、組み合わせる手法にシフトしている。
■【まとめ】E2Eによりレベル5は空想ではなくなる
自動運転で課題とされるのは、通常走行時における自律走行ではなく、イレギュラーな状況下における自律走行だ。いかにイレギュラーな状況に対応できるようにするかが重要なのだ。
この無尽とも言えるイレギュラーな状況すべてに対応するのは困難なため、ルールベースによって走行エリアを区切るなどし、敷居を低くした状態でレベル4サービスを実現しているのが現状だ。
初期状態のE2Eモデルはこのルールベースにまだ追い付いていないが、その背中を捉え始めた印象だ。そのポテンシャルは高く、一定水準に達すれば加速度的に精度を増し、ルールベースを一気に追い越すことが想定される。
そのフェーズに到達すれば、いよいよレベル5が空想ではなくなり、現実的な目標となる。その時はいつ訪れるのか。各社の開発動向に要注目だ。
※自動運転ラボの資料解説記事は「タグ:資料解説|自動運転ラボ」でまとめて発信しています。
【参考】関連記事としては「自動運転はいつ実用化される?レベル・モビリティ別に解説」も参照。
【更新履歴】
2026.04.16 4月最新情報に更新




")
は?ロボタクシー実用化の恩恵は?")

の意味・読み方は?自動車業界の新潮流を示す")
ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

