


日本国内では「自動運転レベル3」(※国の呼称で言うところの「条件付自動運転 ※限定領域」)が2020年4月に解禁され、2021年3月にはホンダが市販車としてレベル3搭載車も発売した。米国や中国では自動運転タクシーの商用展開もすでにスタートしている。
そんな自動運転技術の開発で欠かせない先端技術は、大きく分けて7種類ある。「位置特定技術」「認識技術」「AI技術」「予測技術」「プランニング技術」「ドライバーモニタリング技術」「通信技術」だ。特にAI技術は飛躍的な進化を遂げており、自動運転のためのAIだけではなく、システムと乗員がコミュニケーションするための大規模言語モデル(LLM)の開発も進む。
この記事では、それぞれの技術が必要な理由や各技術に関係する最新トピックスも含めて解説していく。また、自動運転のアプローチである「ルールベース」と「E2Eベース」の違いについても説明する。
・2026年6月12日:関連FAQを追加
・2026年4月15日:「ルールベース」と「E2Eベース」の違いについて説明
・2025年3月28日:AI・大規模言語モデル(LLM)について追記
・2024年10月20日:各技術の最新情報を追記。関連画像などを掲載
・2018年4月21日:記事初稿を公開
記事の目次
| 編集部おすすめサービス<PR> | |
| 自動車保険 スクエアbang!(一括見積もり) 「最も安い」自動車保険を選べる!見直すなら今! |  |
| 新車定額!リースナブル(車のカーリース) お好きな車が月1万円台!頭金・初期費用なし! | |
| 車業界への転職はパソナで!(転職エージェント) 転職後の平均年収837〜1,015万円!今すぐ無料登録を | |
| タクシーアプリは「DiDi」(配車アプリ) クーポン超充実!「無料」のチャンスも! | |
| 編集部おすすめサービス<PR> | |
| スクエアbang! |  |
| 「最も安い」自動車保険を提案! | |
| リースナブル | |
| 新車が月々2万円から! | |
| パソナキャリア | |
| 転職後の平均年収837〜1,015万円 | |
| タクシーアプリDiDi | |
| クーポンが充実!「乗車無料」チャンス | |
■位置特定技術:車両の現在位置を正確に特定
位置特定技術は、英語では「ローカライゼーション(localization)」や「マッピング(mapping)」と呼ばれる。その名前の通り、車両がその時点で走行または駐車している位置を特定するための技術だ。
位置特定には「GPS」(全地球測位システム)などが活用されることが多いが、高精度地図とセンサーを使った自車位置の推定技術も進化している。GPSだけを頼りに走行する場合は、信号の受信環境が悪いトンネル内では安全な自動運転走行ができなくなる恐れがあるからだ。
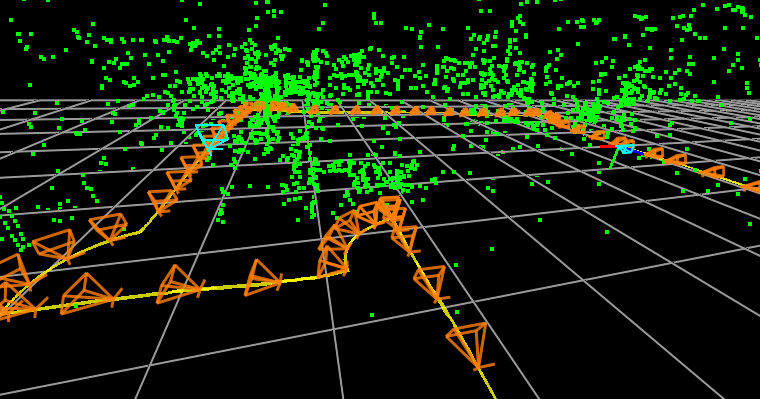
位置特定技術に関して言えば、「SLAM技術」についても知っておきたい。SLAMとは「Simultaneous Localization and Mapping」の頭文字をとった語で、自己位置の推定と地図の作成を同時に実行する技術だ。搭載したセンサーで周囲の環境を認識し、位置を推定する。
「自動運転の目」と呼ばれるLiDARを活用する場合は「LiDAR SLAM」、カメラを活用する場合は「Visual SLAM」と呼ばれる。
【参考】関連記事としては「SLAMとは?位置特定と自動運転地図の作成を同時に」も参照。
■人工知能(AI)技術:運転操作などを判断
前述の通り、認識技術を活用して障害物の検知を行うとき、非常に重要な役割を担うのが人工知能(AI)技術だ。
センサーで認識した物体が何かを識別するためにも必要になってくるのはもちろんだが、障害物を検知するときに急ブレーキを踏むべきかどうかなどの判断にも、AIが活躍する。
例えば、高速道路で鹿を検知したときと、一般道などを走行中にどこかから飛んできた紙袋を検知したときでは、ブレーキ操作に対する判断は異なるべきであると言える。こうした判断にAIが活用される。
自動運転とAIに関して言えば「トロッコ問題」という哲学的テーマがよく議論される。AとBのどちらの選択をしても人を死なせてしまうとき、自動運転AIはどういう判断をすべきなのか、というものだ。いまのところこのトロッコ問題に関する明確な結論は出ていない。
またAIに関しては、大規模言語モデル(LLM)を自動運転車向けに開発する動きも出てきた。LLMとは、文章の理解や自然な文章の生成を行うAIのことで、乗員が自動運転車のシステムに話しかけたり、システム側が乗員に何らかの通知をしたりする際に、こうしたAIの活用が模索されている。
なお、ルールベースの自動運転とE2Eモデルの自動運転では、AIの活用度に大きな違いが出てくる。ルールベースの自動運転は、さまざまな前提条件(※マップデータやインフラデータなど)があらかじめ用意された中での限定的なAIの活用にとどまるが、ルールベースではAIが「人間の目」のように機能し、原則としてセンサーで認識した情報そのものだけでさまざまな判断を行う。
【参考】AIと自動運転車については「自動運転にAI(人工知能)は必要?倫理観問う「トロッコ問題」って何?|自動運転ラボ」も参照。
■認識技術:自動車や歩行者、障害物などを検知・認識
英語で「パーセプション(perception)」と呼ばれるのが認識技術で、障害物の位置や動きを認識したり、周辺の歩行者や自転車の状況を把握したり、道路などの状況を確認したりと、求められる解析対象は多岐にわたる。
物体認識のために必要なセンサーとして搭載されるのは、ステレオカメラやレーダー、光技術を活用したLIDAR(ライダー)などだ。こうしたセンサーで得たデータをAIに学習させることで、車両や歩行者、障害物などを識別することができるようになる。
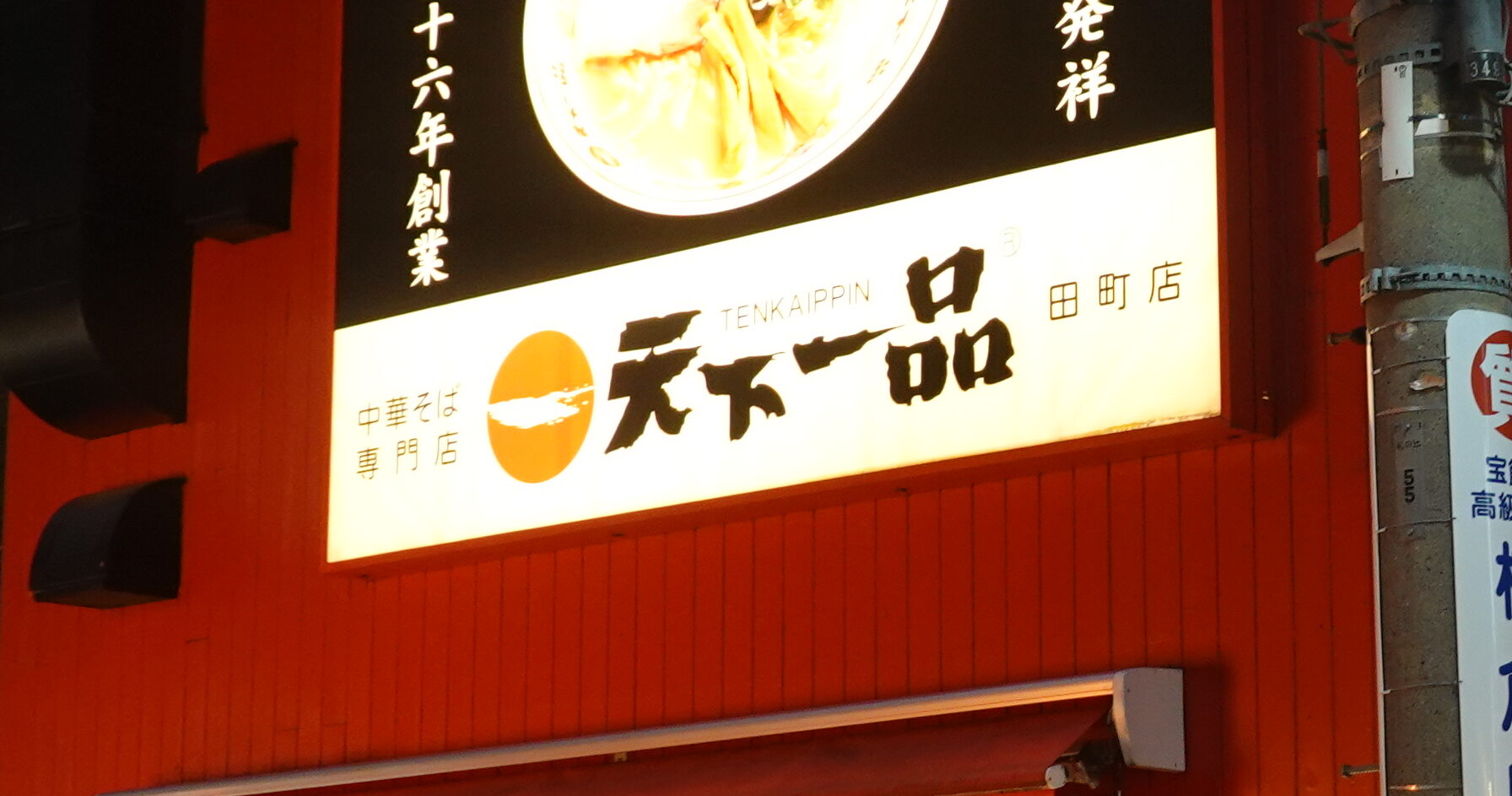
認識技術に関しては、ホンダの標識認識機能がラーメンチェーン店「天下一品」のロゴを「車両進入禁止」の道路標識と誤認識したことが2021年初旬に話題になった。こうした誤認識については、認識ソフトウェアのOTA(無線アップデート)で解消することがポイントとなる。
【参考】関連記事としては「「天下一品」誤認識問題、「OTA」が解決の鍵!自動運転時代の必須技術」も参照。
■予測技術:事故リスクや危険可能性を算出
予測技術は英語で「プレディクション(prediction)」と呼ばれる。人工知能(AI)も活躍する技術領域となっている。あらかじめ歩行者や自転車の飛び出しや事故が発生する可能性などを予測し、諸条件が重なったときにシステム側で減速するなどの処理を行う。
さらに、自動運転で走行時の天候や路面状況、災害情報も鑑みて発生しうる危険を予測し、安全走行のためには欠かせない技術の一つとなっている。
■ドライバーモニタリング技術:運転手の状況を監視

ドライバーモニタリング技術とは、特に自動運転レベル2からレベル3へのステップアップに必要とされる技術であると言える。
自動運転レベル3では、緊急時には運転手が運転操作を担う。そのためシステム側は、自動運転時には運転手の状況を常に監視しなければならない。
ちなみに、ホンダが2021年3月に発売したレベル3搭載車の新型「LEGEND」でも車内向けのモニタリングカメラが設置されており、システム側からの操作の要求に運転手が応じない場合には、安全に車両を減速・停車させることにつなげる技術も搭載されている。
人が運転に関与しないレベル4以上の自動運転時にもモニタリング技術が必要となる。車に乗っている人がどのような姿勢でいるのかをシステム側が確認することで、例えば右折・左折時の遠心力が少なくなるよう配慮できるようになり、乗っている人の「安心」につながるからだ。
【参考】関連記事としては「ホンダの自動運転レベル3搭載車「新型LEGEND」を徹底解剖!」も参照。
■プランニング技術:状況に応じて走行ルートの決定
プランニング技術は、どの車線・経路を走行したら最も安全かなどを自動運転車のシステム側がリアルタイムに算出し、実際の走行ルートに反映させていくための技術のことだ。
近くを走る走行車両や障害物・歩行者・自転車の位置を認識技術を活用して検知することなどにより、膨大なデータを基に総合的に安全な走行車線やルートが判断される。
プランニング技術で技術的ハードルが高いとされることの一つが、自動運転車両が予想外の事態に陥ったときの対応などだ。プランニング技術にもAI技術は関わってくる。
■通信技術:車車間通信や路車間通信、インフォテインメント向けでも
自動運転を実現するためには、車両に搭載された技術やシステムだけではなく、外部と通信ネットワークでつながる必要がある。
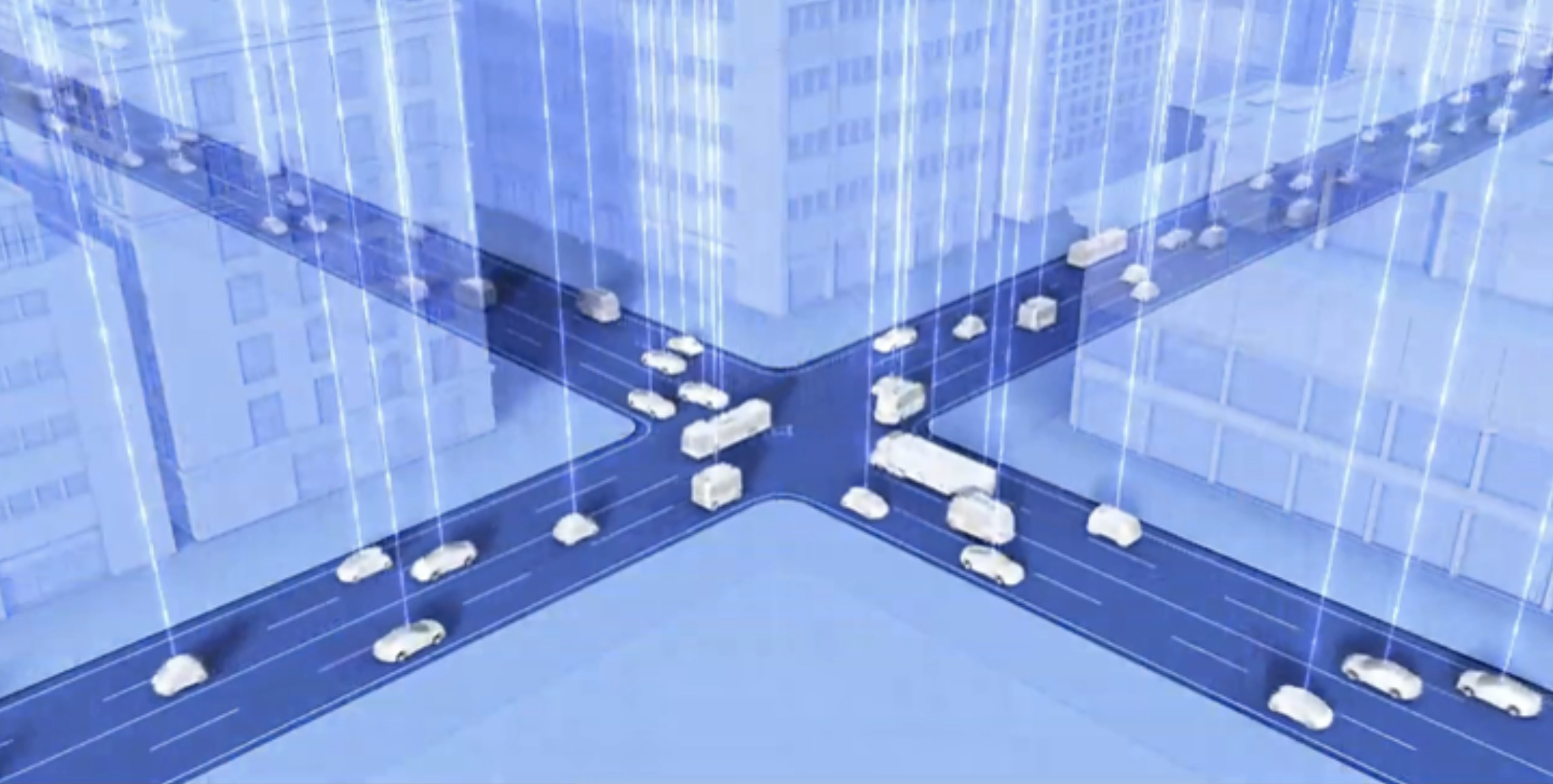
例えば「Cloud-to-Car」と呼ばれる技術がある。車両センサーで検知した情報がクラウド上に送信されて混雑状況や事故状況などに関するビッグデータが作られる。そしてそれぞれの自動運転車がそのビッグデータから必要な情報を取得するという仕組みだ。
車車間通信(V2V)、路車間通信(V2I)といった「V2X通信」と呼ばれるシステムの開発も必要になる。また、高速通信・低遅延などが特徴の次世代通信規格「5G」も自動運転車には必須の通信技術だ。
通信技術に関しては、車両が安全に走行するためだけではなく、車載インフォテインメントシステムなどでも活用される。車両がネットワークとつながることで乗員向けにさまざまな情報やコンテンツを提供できるようになる。
【参考】関連記事としては「自動運転と通信」も参照。
■自動運転のアプローチ
自動運転には2つのアプローチがある。「ルールベース」と「E2Eベース」だ。
従来はルールベースに基づく開発が主流であったが、より高い汎用性と拡張性を備えたE2E(エンドツーエンド)モデルに取り組む事業者が増えてきている。
自動運転は、センサーによる「認知」、AIによる「判断」、車両を動かす「制御」という一連のプロセスで成り立つ。この基本構造自体はルールベースもE2Eも共通しているが、各プロセスにおける設計思想と開発手法に大きな違いがある。
ルールベース
ルールベースは、エンジニアがあらかじめ定義したルールに基づいてAIが判断を行う手法である。「赤信号では停止する」「センターラインを越えない」といった交通ルールや判断基準を一つひとつ明示的に与え、それに従って行動する仕組みだ。
このアプローチは判断根拠が明確であり、安全性や検証性に優れる点が強みである。トラブル発生時にも原因の特定が比較的容易で、改善サイクルを回しやすい。一方で、現実の道路環境には例外的な状況が多く存在するため、それらすべてをルールとして定義し続ける必要がある。
例えば、駐停車車両を避けるために一時的にセンターラインを越える必要がある場面や、横断歩道付近で歩行者の意図が不明確なケースなど、人間でも判断に迷う状況は少なくない。ルールベースではこうしたシナリオを個別に設計しなければならず、開発・運用の負担が非常に大きくなる。
また、認知・予測・経路計画・制御といった各機能がモジュールごとに分かれている点も特徴である。それぞれの機能を個別のモデルで処理し、最終的に統合して判断を下す構造となっている。
E2Eベース
E2E(エンドツーエンド)モデルは、認知から制御までの一連のプロセスを単一のAIモデルで一体的に処理する手法である。センサーから得られた情報をもとに、直接的に運転操作を出力する構造となっており、人間の運転に近いプロセスとされる。
この手法では、エンジニアが細かなルールを定義するのではなく、大量の走行データを用いてAIが自律的に運転技能を学習する。そのため、従来のルールベースでは対応が難しかったイレギュラーな状況にも柔軟に対応できる可能性を持つ。
特に近年は、生成AIやディープラーニングの進展によりE2E開発が急速に注目を集めている。中国勢を中心に開発が活発化しており、将来的にはあらゆる環境で自動運転を実現するレベル5への道を切り拓く技術として期待されている。
一方で、E2Eには課題も多い。膨大な学習データと高い計算能力が必要であるほか、判断根拠がブラックボックス化しやすい点が指摘されている。事故発生時の原因分析や説明責任の確保が難しくなる可能性があり、ハルシネーション(誤った判断)のリスクも無視できない。
また、開発初期段階では学習が不十分なため精度を確保しにくく、実用化までに時間を要する傾向がある。このため、現時点ではルールベースとE2Eを組み合わせたハイブリッド型の開発も多く見られる。
【参考】関連記事としては「自動運転モデル「ルールベース」「E2Eモデル」とは?」も参照。
■【まとめ】自動運転車はさまざまな技術の集大成
自動運転車はさまざまな技術の集大成として実現する。そして自動運転レベルが上がるについて各要素技術の技術レベルも高いものが求められる。各社が開発する要素技術が今後どのように進化していくのか、引き続き注目していきたい。
■関連FAQ
Q. 自動運転にはどのような技術が必要なのか?
自動運転の実現には、位置特定技術、認識技術、AI技術、予測技術、プランニング技術、ドライバーモニタリング技術、通信技術などが必要である。これらの技術が連携することで、安全かつ円滑な自動運転が可能となる。
Q. 自動運転におけるAIの役割とは何か?
AIは、センサーが収集した情報を解析し、歩行者や車両、障害物などを認識する役割を担う。また、状況に応じた運転判断や制御も行う重要な技術である。
Q. GPSだけで自動運転は可能なのか?
GPSだけで自動運転を実現することは難しい。GPSの精度が低下する環境もあるため、高精度地図やSLAM技術、各種センサーを組み合わせて正確な位置を把握する必要がある。
Q. ルールベース方式とE2E方式の違いは何か?
ルールベース方式は、人間が設定したルールに従って車両を制御する方式である。一方、E2E方式はAIが大量のデータを学習し、認識から運転制御までを一体的に行う方式である。
Q. なぜ通信技術が自動運転に必要なのか?
通信技術は、車両同士や道路インフラとの情報共有を可能にするため重要である。事故や渋滞などの情報をリアルタイムで取得できるため、安全性や利便性の向上につながる。
(初稿公開日:2018年4月17日/最終更新日:2026年6月12日)
【参考】関連記事としては「自動運転とは?技術や開発企業、法律など徹底まとめ!」も参照。
とは?いつ実現?")

とは?搭載する自動車の車種は?自動運転ではない?")



の自動車保険を比較!")
の意味・定義・読み方は?自動車業界の新潮流を示す")
ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

