

自動運転のコア技術に数えられる自己位置特定と地図作成。自動運転車にとって自己位置の特定は必須技術であり、地図は高精度な自動運転の実現に大きく寄与する。
この2つを同時に実行する技術がある。「SLAM」(スラム)だ。スタンダードとなっているGPSによる自己位置特定と異なる技術を導入することで、自動運転の精度を高めることができるのだ。
この記事では最新情報をもとに、SLAMの概要や導入事例などについて解説していく。
■SLAM(スラム)とは?
ローカリゼーションとマッピングを同時に実行
SLAMは「Simultaneous Localization and Mapping」の頭文字をとった語で、「スラム」と読む。直訳すると「ローカリゼーションとマッピングの同時実行」を意味する。「位置特定」と「地図作成」を同時に行うことができる技術だ。
センサーを搭載した車両などの移動体を用い、移動しながら周囲の環境をマッピングしていく。また、センサー画像などから任意の基準点を設け、この基準点をベースに移動量を計算したり、車両に搭載した慣性計測装置(IMU)などから移動量を算出したりすることで自らの相対的な位置を特定することができる。
GPSは地球上の位置を示す絶対位置となる座標を得ることができる一方、SLAMは作成した地図上における位置を特定することができるのだ。
知らない土地に立ち入った人間が周辺をくまなく散策して地図を作成するのと似たようなイメージだ。視界に入った建物や道路などを逐一メモして周辺地図を作成すると同時に、歩行距離や方角などから移動量を算出することで地図における自身の位置を把握する。SLAMは、この一連の動作を行っているのだ。
自動運転において必須となる自己位置特定と地図作成を効率よく行うことができる技術だ。GPS情報がなくても相対的な位置情報を得ることができるため、屋内駐車場や山間部、トンネルなど場所を問うことなく活用することが可能だ。
▼SLAMの現状と今後の展望|友納 正裕、原 祥尭
https://www.jstage.jst.go.jp/article/isciesci/64/2/64_45/_article/-char/ja/
▼LiDARを用いたSLAM技術の現状と展望|田崎 勇一
https://www.jstage.jst.go.jp/article/isciesci/64/2/64_51/_article/-char/ja/
カメラ、LiDAR、ToFの3タイプが主流

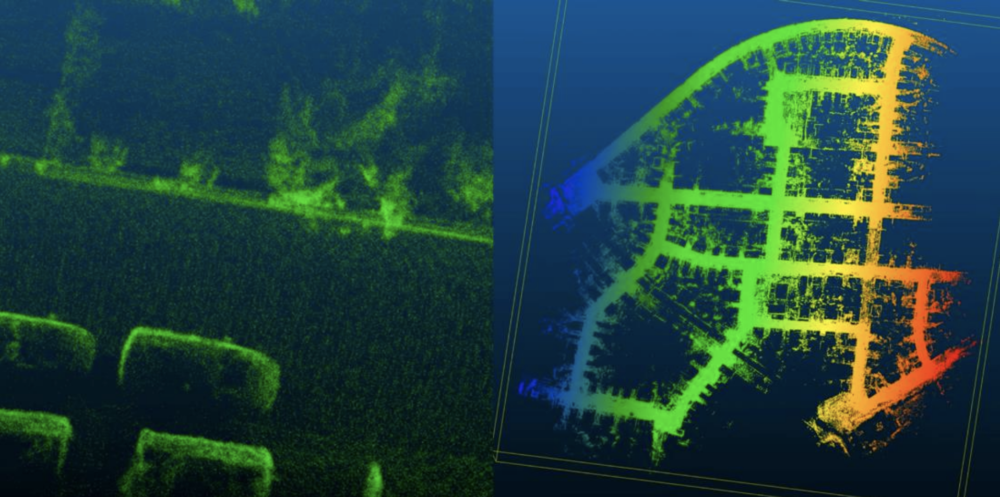
センサーには、主にカメラ、LiDAR、ToF(Time of Flight)センサーが用いられる。LiDARによる点群データを活用するものを「LiDAR SLAM」、カメラの映像データを活用するものを「Visual SLAM」、ToFセンサーによる深度画像データを活用したものを「Depth SLAM」と呼ぶ。
【参考】関連記事としては「LiDARとは?読み方は?」も参照。
レーザーなどを活用するLiDARやToFセンサーは物体までの距離を測定するのが得意で、立体的なマッピング精度が高い。夜間などでも計測することが可能だ。カメラは情報量が多く物体の把握に優れる。ステレオカメラを用いることで距離を算出することもできる。
一方、LiDARは比較的高額でデータ負荷が高い。レーザーを照射する範囲が縦方向に狭いほか、周囲の対象物が少ないと点群の密度が荒くなりがちという。カメラはコストパフォーマンスに優れる一方、LiDARなどと比べ距離計測や夜間における計測などが苦手だ。
それぞれに一長一短があるが、LiDARとカメラを併用することも可能で、用途に合わせたセンサー構成でローカリゼーションとマッピングを実行することができる。
データ処理時間や局所的な位置情報の精度、全体的な地図の整合性、動く物体に対する処理などSLAM特有の課題はあるが、センサーフュージョンや高性能コンピュータの使用などによって幅広い分野で活用可能な技術となっている。
屋内向けをはじめ屋外のドローンや自動運転でも活躍
GPSが不要なSLAMは、屋内での作業を得意とする。この特性から、商業施設における清掃ロボットや警備ロボットなどの各種サービスロボットや、構想や倉庫における自動搬送ロボットなどに用いられることが多い。
ロボット自らが対象エリア内を走行してマッピングし、さまざまな走行経路を把握する。その後、一定の指示に従って目的地に向かう際は、事前にマッピングしたオブジェクトと、カメラなどのセンサーからリアルタイムで検出されるオブジェクト情報を突合するなどし、自己位置を特定しながら自律走行する。
このほかにも、SLAMはドローンや測量、自動運転農機・建機、車道における自動運転などに活用される。潜水艦や地球外探査などでも活躍するという。
車道における自動運転では、GPSを併用することでローカリゼーションとマッピングの精度・冗長性を高めることができる。走行環境による影響を受けにくくし、ロバスト性を高めることができるのだ。
■SLAM(スラム)開発企業
Kudan:商用グレードの「GRAND SLAM」提供
人工知覚(AP)技術の研究開発を手掛けるKudanは、空間認識の能力を与えるAPアルゴリズムの研究開発により、自動運転やロボティクス、AR・VRなどの領域におけるイノベーションを加速している。
商用グレードの性能を備えたソフトウェア「GRAND SLAM」は、カメラやLiDARをプライマリセンサーに据え、さらにToFやIMU、GNSS、ホイールオドメトリなど幅広いセンサーデータに対応している。
高精度かつ低レイテンシを実現するほか、大規模マップへの拡張や他システムとの統合、クロスプラットフォームなども可能だ。
2022年7月には、中国で自動運転ソリューション開発を手掛けるWhale Dynamicが、Kudanの3D-Lidar SLAM技術を統合した自動運転配送車と関連するHDマップ作成用ツールセット製品の提供を開始したことが発表されている。
同社はKudanと2021年から技術連携を進めている。無人配送向けの多目的自動運転車「WD1」やマッピングハードウェアキットとソフトウェアツールセットの提供を開始するほか、中国の主要都市で展開する自動運転プロジェクトを受注し、社会実装と技術のさらなる高度化を推進していく構えだ。
また、コンピュータビジョン技術の開発などを手掛けるKudanの関連企業Artisenseは、完全自動運転を可能にする自己位置推定技術の開発を行う欧州のERASMOプロジェクトに参画するなど、活躍の場を広げているようだ。
▼kudan公式サイト
https://www.kudan.io
【参考】Kudanの取り組みについては「Kudan、自動運転にも役立つギガポイントマップ生成技術を開発」も参照。
マップフォー:3次元地図作成システム「MapIV Engine」開発
3次元地図技術の開発を手掛けるマップフォーは、独自のSLAM技術を結集した3次元地図作成システム「MapIV Engine」を開発している。センサーフュージョン技術によってSLAM特有の諸課題を克服し、手持ちのデータで高精度な3次元点群構築が可能という。
同社はこのほか、GNSS・IMUを用いた位置推定システム「Eagleye」や3次元地図と単眼カメラ画像を用いた位置推定システム「Iris」などもオープンソースとして公開している。
▼マップフォー公式サイト
https://www.map4.jp
【参考】マップフォーの取り組みについては「3D地図、タクシー車両を活用して作成!実証実施をマップフォーが発表、自動運転への活用に向け」も参照。
DMP:Visual SLAMソフトウェア「ZIA SLAM」を開発

半導体開発などを手掛けるディジタルメディアプロフェッショナル(DMP)は2021年、Visual SLAM技術のソフトウェア「ZIA SLAM」の提供を開始したと発表した。
ロボットアプリケーション用のソフトウエアプラットフォーム「Robot Operation System(ROS)」の最新バージョン「ROS2」をサポートするほか、GPUやCPU、FPGAなどプラットフォームに依存せずに組み込むことができる高い汎用性を確保しているという。
単眼カメラ、ステレオカメラ、RGBDカメラなど各種カメラに対応し、IMUやGPSなどのセンサーとフュージョンすることもできる。
▼ディジタルメディアプロフェッショナル公式サイト
https://www.dmprof.com/
【参考】DMPの取り組みについては「低コストな自動運転化に寄与!DMP、Visual SLAMソフトの提供開始」も参照。
キヤノン:Visual SLAMベースの映像解析ソフトウェアを開発

カメラやプリンターでおなじみのキヤノンも2020年にVisual SLAMベースの映像解析ソフトウェアを開発し、移動ロボット市場に参入している。
現実世界と3D CGをリアルタイムに融合するMR(Mixed Reality/複合現実)研究で培った、周囲の静止物をマーカー代わりにする空間特徴位置合わせ技術を活用することで、Visual SLAM技術を含む映像解析ソフトウェアの実用化に成功した。
次世代自動搬送台車(AGV)や自律走行搬送ロボット(AMR)などへの導入を見込んでおり、日本電産シンポが発売した自動搬送台車「S-CART-V」シリーズなどで採用されているという。
▼キヤノン公式サイト
https://global.canon/ja/technology/visual-slam-2021.html
■SLAM(スラム)活用事例
自動搬送ロボットへの導入が加速
物流ロボットの製造・販売を手掛けるGeek+(ギークプラス)は2018年、物流ロボットEVEシリーズの新商品としてSLAM型の販売を開始した。作成したマップを複数のロボットが同時に確認することができる独自のマッピングシステムを搭載している。
大和ハウスグループのアッカ・インターナショナルが第1号として導入したほか、トヨタも自動車製造工場の搬送ロボットとして採用しているようだ。
このほかにも、GROUNDの自律型協働ロボット「PEER」やオムロンの自動搬送モバイルロボット「LD / HDシリーズ」など、さまざまなロボットにSLAMが用いられている。
【参考】自動搬送ロボットについては「地図を自分で作る!オムロンの自動運転ロボに栄誉」も参照。
地図を自分で作る!オムロンの自動運転ロボに栄誉 https://t.co/U2sKtsmUuB @jidountenlab #自動運転 #オムロン
— 自動運転ラボ (@jidountenlab) October 19, 2022
空港内における自動運転実証でもSLAM活用
自動運転関連では、ANAと先進モビリティ、SBドライブ(現BOLDLY)が2019年度に実施した空港制限区域内の自動走行に係る実証実験でもSLAMが活用されている。
実証では、自己位置推定にGNSSや慣性航法に加えSLAM技術の活用を初めて採用し、空港内におけるランプバスの走行状態を確認した。
その結果、3つの手法のうちSLAMの精度に起因した手動介入が多く発生しており、さらなる精度の向上と多重化の強化が必要としている。
まだまだ課題があるようだが、開発事業者にとっては逆にビジネスチャンスとなる。高精度で処理能力の高いSLAM技術の需要は今後いっそう高まりそうだ。
【参考】空港における取り組みについては「【資料解説】空港ランプバスの自動運転実証、ANAやAIROによる実施結果は?」も参照。
【資料解説】空港ランプバスの自動運転実証、ANAやAIROによる実施結果は? https://t.co/lHluPlw4h3 @jidountenlab #自動運転 #ランプバス #空港
— 自動運転ラボ (@jidountenlab) April 1, 2020
大成建設、「月面でのSLAM技術」で取り組み
大成建設もSLAMに関する取り組みを行っている。国土交通省などが推進する「宇宙開発利用加速化戦略プログラム(スターダストプログラム)」の一環として、月面環境に適応する「SLAM自動運転技術」の開発を進めることが明らかになっている。
月面環境を思い浮かべると、測位衛星システムがないことが容易に想像できる。そこで、環境情報を活用するLiDAR-SLAM技術と、人工的な特徴点を活用するランドマークSLAM技術を統合し、月面でも自動運転技術を使ってさまざまな建設機械が活躍できるようにする狙いがあるようだ。
【参考】関連記事としては「大成建設、月面に適応する「SLAM自動運転技術」開発へ」も参照。
大成建設、月面に適応する「SLAM自動運転技術」開発へ https://t.co/AYwFB4LXyK @jidountenlab #大成建設 #宇宙 #自動運転
— 自動運転ラボ (@jidountenlab) August 20, 2022
■【まとめ】SLAM技術はまだまだ進化の余地がある
屋内向けロボットへの導入をはじめ、自動運転分野への応用も徐々に広がり始めている状況のようだ。LiDARの低価格化やセンサーフュージョン技術の向上などにより、今後SLAM技術がさらなる進化を遂げていく可能性がある。
自動運転技術のさらなる向上に資する技術として、今後の開発動向に注視したい。
(初稿公開日:2020年5月4日/2024年7月25日)
【参考】関連記事としては「自動運転に必須の7技術まとめ!位置特定技術、AI技術、予測技術など」も参照。
とは?搭載する自動車の車種は?自動運転ではない?")

とロボタクシーを徹底解説")



するなら?おすすめを口コミ情報から比較【2026年最新】")
の意味・読み方は?自動車業界の新潮流を示す")
ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

