

インフラ側から自動運転をサポートする「自動運転支援道」の先行導入地域が、このほど明らかになった。
経済産業大臣が議長を務める「デジタルライフライン全国総合整備実現会議」によると、高速道路においては「新東名高速道路」や「東北自動車道」の一部区間、そして一般道では茨城県日立市の一部エリアを選定し、インフラ整備や実証を本格化させる。
「専用道」ではなくあくまで「支援道」だが、自動運転の精度や安全性を高めるにはインフラ協調や社会受容性の向上などが欠かせない。支援道を設定して早期に要件を確立し、横展開を加速して自動運転技術の普及を後押ししていく構えだ。
自動運転支援道とはどのようなものか、その中身に迫っていく。
記事の目次
■自動運転支援道設置に向けた議論の流れ
デジタル田園都市国家構想のもと議論が本格化
自動運転専用レーンや優先レーンなどに関する議論は以前から行われていたが、道路の新設や既存レーンの優先使用はインフラ整備面・運用面でハードルが高く、具体化した取り組みを行っているのは鉄道敷をバス専用道に転換した気仙沼線BRT(バス高速輸送システム)などごく一部に限られていた。
しかし、デジタル田園都市国家構想実現会議において、2024年度にも新東名高速道路の駿河湾沼津〜浜松間に自動運転専用レーンを設置する方針が示されるなど、実現に向けた事業化が一気に動き出した。
【参考】気仙沼線BRTにおける自動運転については「JR東日本が堂々宣言!「自動運転レベル4認証取得を目指す」」も参照。
JR東日本が堂々宣言!「自動運転レベル4認証取得を目指す」 https://t.co/R3zVMvvS3A @jidountenlab #JR東日本 #自動運転
— 自動運転ラボ (@jidountenlab) April 6, 2023
アーリーハーベストプロジェクトに「自動運転車用レーン」
デジタル田園都市国家構想のもと、国は約10カ年の中長期計画「デジタルライフライン全国総合整備計画」を2023年度中に策定する。デジタルによる社会課題解決や産業発展の恩恵を全国津々浦々に行き渡らせるための政策だ。
自動運転関連では、官民で集中的に大規模な投資を行い、自動運転やAI(人工知能)のイノベーションを急ぎ社会実装してデジタルとリアルが融合した地域生活圏の形成を目指す方針が掲げられている。
この中で、早期着手するアーリーハーベストプロジェクトとして「ドローン航路」や「自動運転車用レーン」、「インフラ管理のDX」が盛り込まれ、2024年度からの実装に向けた支援策を推進することとなった。
こうした方針を受け、デジタルライフライン全国総合整備実現会議は「自動運転支援道ワーキンググループ(WG)」を設置し、議論を深めている。WGの座長は、トヨタ自動車のコネクティッドカンパニービジネス領域統括部長・フェローの鯉渕健氏が務めている。
▼自動運転支援道ワーキンググループ 第1回|デジタルライフライン全国総合整備実現会議
https://www.meti.go.jp/policy/mono_info_service/digital_architecture/lifeline_kaigi/autowg/dai10802/siryou_3.pdf
方針としては、自動運転支援道に関してアーキテクチャを整理した上で具体例を整理するとともに、先行地域を含む普及シナリオや役割・定義、運営主体や計画について議論を行う。また、ハード、ソフト、ルールそれぞれのデジタルライフラインに対する要求事項を整理し、アーキテクチャWGへのインプットにつなげていくとしている。
自動運転「専用」にこだわらず、インフラ協調システムなど自動運転車の安全走行を支援する道路インフラの在り方を総合的に議論していくようだ。
デジタル田園都市国家構想のもと、デジタル庁を中心に策定が進められている「モビリティ・ロードマップ2024」にも、自動運転支援道に関する事業が明記されるものと思われる。
これまでの議論の成果は、デジタルライフライン全国総合整備実現会議が2023年9月に発表した「中間取りまとめ(案)」に示されている。以下、この案の中身を見ていこう。
▼デジタルライフライン全国総合整備実現会議 中間取りまとめ(案)
https://www.meti.go.jp/policy/mono_info_service/digital_architecture/lifeline_kaigi/dai2_0915/siryou_2_matome.pdf
▼中間とりまとめ(案)のポイント
https://www.meti.go.jp/policy/mono_info_service/digital_architecture/lifeline_kaigi/dai2_0915/sankousiryou_2.pdf
【参考】デジタルライフライン全国総合整備計画については「自動運転を含む日本の新「モビリティロードマップ」策定へ」も参照。
自動運転を含む日本の新「モビリティロードマップ」策定へ https://t.co/uMBkzZ81Op @jidountenlab #自動運転 #ロードマップ
— 自動運転ラボ (@jidountenlab) June 4, 2023
■中間取りまとめ(案)の内容
自動運転支援道と自動運転車用道を定義
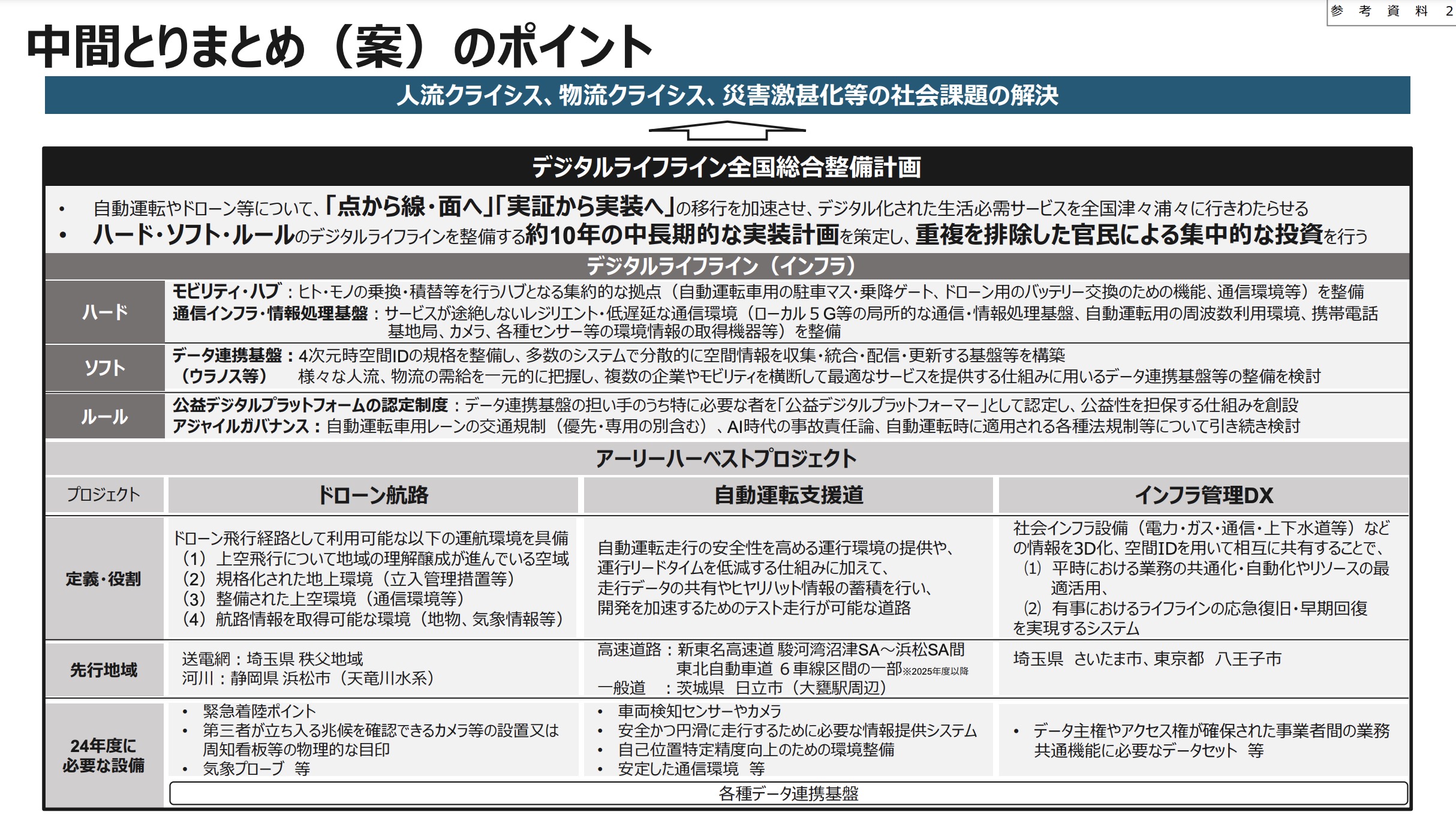
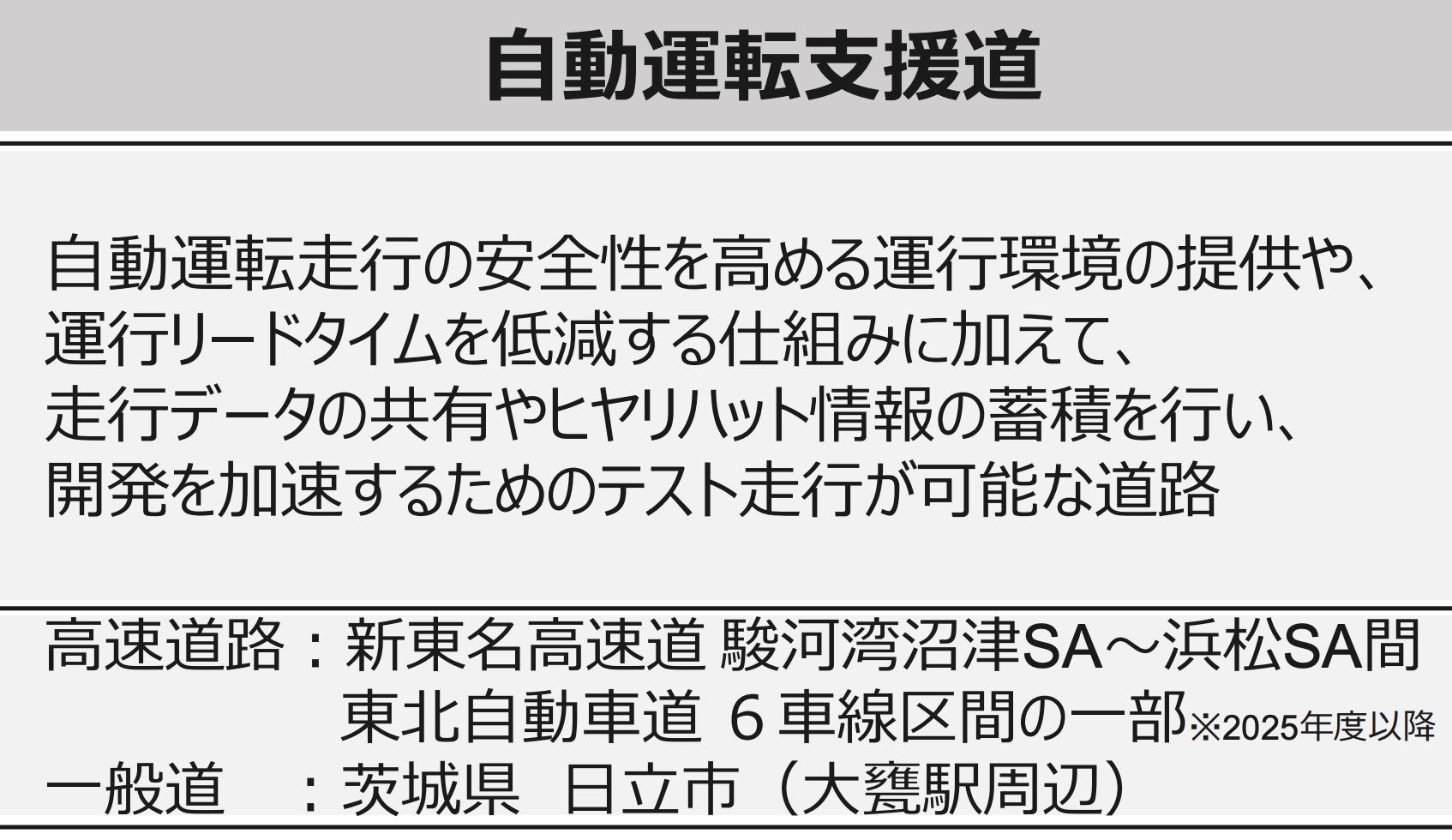
中間取りまとめ(案)では、自動運転車の社会実装に向け、開発を加速するためのテスト走行が可能な自動運転支援道が必要とし、ハード・ソフト・ルールの面から自動運転車の走行を支援する「自動運転支援道/レーン」と、その中でも自動運転専用または優先化した「自動運転車用道/レーン」を定義する。自動運転支援道の走行シミュレーションが可能な仮想環境も含むという。

検討課題としては、高速道路と一般道別に以下を挙げている。
高速道路はV2X・V2N通信の環境整備などを促進
- (1)走行環境:自己位置特定精度向上のための環境整備や、SA・PA含めた高精度3D地図の整備
- (2)道路交通情報システム:合流支援情報や車線変更を支援するための情報提供、インフラ側のカメラや車両センサーなどによる落下物・車両故障などの検知、車両の稼働状況・運行データなどの情報収集
- (3)通信環境:分合流円滑化に向けたV2X通信や安定した遠隔監視・運行管理のためのV2N通信などの環境整備
- (4)自動運転車用レーンの運用:自動運転車用レーンの周知や、遠隔監視・運転手や保安要員の派遣など
これらの課題解決に向け、2024年度は自己位置特定精度を向上する環境整備や、合流支援情報や車線変更を支援するための情報提供、V2X・V2N通信の環境整備などを進めていく計画だ。
一般道は車両検知センサーや交差点カメラを設置
- (1)走行環境:自己位置特定精度向上のための道路インフラ等の環境整備や、車両検知センサーやカメラの交差点への設置
- (2)道路交通情報システム:安全かつ円滑に走行するために必要な情報提供システムや信号情報提供システムの整備、車両の稼働状況・運行データなどの情報収集
- (3)通信環境:安定した遠隔監視・運行管理のためのV2N通信や、ローカル5G通信などの環境整備
2024年度は、車両検知センサーやカメラの交差点への設置や、自己位置特定精度向上に資する道路インフラなどの環境整備、安定した遠隔監視・運行管理のための通信環境の設備、自動運転に必要な通信の信頼性確保に必要となるローカル5G通信などの環境整備などを進めていく。
高速道路は6車線区間を優先設定
高速道路においては、自動運転車用レーンを活用してレベル4相当のトラックを用いた外部支援に関する技術検証を行うことで、将来的な外部支援の在り方の具体化につなげる。
短期的には、物流ニーズとして一定の需要が見込まれる地域の6車線区間から自動運転車用レーンの設定を開始する。中長期的には、車両の開発・普及状況を踏まえた自動運転支援道を設置することで、東北から九州までをつなぐ幹線網の形成を図っていく。また、自動運転車用レーンはトラックだけでなく乗用車や高速バスなどにも活用されることを想定する。
一般道は限定空間から導入、ビジネス性や社会受容性を重視
一般道においては、特にリスクが低いエリアにおいて、幅広い用途を想定してレベル4相当の自動運転バスやカートを用いた外部支援に関する技術検証及びビジネス実証を行い、将来的な外部支援の在り方の具体化や事業モデルの確立につなげる。
短期的には、他の交通参加者との隔離が可能なBRT専用区間などの限定空間から導入を開始し、そこから路線を拡張する形で面での整備を進めていく。
その際、経済性の観点から工場地帯などの人や荷物が高密度で定期的に動く地域を想定する。その後、幹線道路などの交通環境が整備された空間、そして生活道路などの混在空間に広げていく。
また、自動運転支援道の普及とあわせ、自動運転車の普及や台数拡大も図ることで、量産効果によるコスト低減や走行距離増による技術レベルの向上、社会受容性の向上などを目指す。
なお、レベル4車両の開発や量産には時間がかかるため、短期的にはレベル4トラック数台とレベル4バス数台に加え、レベル2車両を用いて自動運転車用レーンにおける走行データの取得やオペレーションの構築を実施する。
茨城県日立市などを先行地域に選定
自動運転支援道の先行地域については、実証などによって自動運転車の走行に対する地域の理解の醸成が進んでいることや、異なる交通参加者と分離可能な空間かそれに準ずる環境、ビジネス的な観点から定期的・定量的なニーズが見込めるなど運用コストについて自走が可能であること──などを考慮して選定した結果、2024年度においては新東名高速道路の駿河湾沼津SA-浜松SA間と、茨城県日立市の大甕(おおかみ)駅周辺を先行地域として検討する。
また、2025年度以降においては、東北自動車道の六車線区間の一部でも検討を進めていく。
■海外事例
米ミシガン州で自動運転専用レーン設置へ
海外では、米ミシガン州で官民協同のもと自動運転車専用レーンの開発が進められている。グーグル系列のSidewalk Infrastructure Partners子会社のCavnueがミシガン州運輸省と提携し、コネクテッド化された自動運転車(CAV)に対応したインフラ整備構想を膨らませている。
構想では、デトロイトとアナーバーを結ぶ約40キロの州間高速道路に自動運転専用レーンを設けるとしている。2022年には、自動運転道路に関する法案を州議会が可決しており、事業化に向けた動きは加速しているようだ。
また、自動車メーカーや自動運転開発スタートアップ各社が同社と提携している点もポイントとなりそうだ。同社の自動車諮問委員会には、フォードやGMをはじめ、トヨタやホンダ、BMW、Motional、May Mobilityなどが名を連ね、道路インフラに求められる要件などについて意見を交わしているようだ。
道路インフラや送受信する情報の種別、通信手段など、一定の規格化が行われなければ開発各社は対応しづらく、横展開にも遅れが生じる。
自動運転支援道WGには、ダイナミックマッププラットフォーム(旧ダイナミックマップ基盤)やソフトバンク、ティアフォー、T2、トラックメーカー各社などが名を連ねているが、今後、実証においても開発各社が参画する可能性が考えられる。
【参考】関連記事としては「Google系企業、ミシガン州で「自動運転専用レーン」に着手」も参照。
Google系企業、ミシガン州で「自動運転専用レーン」に着手 https://t.co/uTAcBWq8t4 @jidountenlab #自動運転 #Google #アメリカ
— 自動運転ラボ (@jidountenlab) May 17, 2022
■【まとめ】レベル4普及に向け国がインフラ面から後押し
道交法改正などでレベル4サービスは可能になったが、今のところ一部企業を除き民間における実証・実用化が大きく加速しているとは言えない。走行するエリアによって求められる要件に大きな隔たりがあり、横展開が難しいことが要因の1つに挙げられる。
しかし、レベル4普及に向け国がインフラ面から後押しすることで、こうした隔たりを一定程度均一化することができる。高精度3次元地図が重要な情報インフラ基盤となるのと同様、自動運転に資するさまざまな要素を共通基盤化できれば、横展開もスムーズなものとなる。
今後、議論がどのように進められ、2024年度以降の実証につながっていくのか。要注目だ。
※自動運転ラボの資料解説記事は「タグ:資料解説|自動運転ラボ」でまとめて発信しています。
【参考】関連記事としては「【必読】自動運転、日本の新方針Ver7.0は「デジタル化」に重点」も参照。







の意味・読み方は?自動車業界の新潮流を示す")
・自動運転ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル・スズキ】欧米車種も")

