

自動運転の要素技術に挙げられる人工知覚(Artificial Perception)技術や位置特定技術。センサーやAI(人工知能)の活用によって自動運転車に「眼」を与え、周囲の状況を認識するとともに、自車位置を正確に特定することで自動運転の精度を高めることができる。
自動運転車はどのようにして「眼」の機能を得ているのか。また、どのようにして自己位置を特定しているのか。認識機能や位置特定技術を解説するとともに、注目のSLAM技術についても触れていこう。


記事の目次
■AIによるデータの認識
一般的に、自動運転車はLiDARやカメラなどのセンサーを複数搭載し、車両周囲や進行方向の状況を把握するとともに、GPSに代表される衛星測位システムによる位置情報やセンサーデータを高精度3次元地図と照合することで自車位置を特定し、安全な走行を実現する。
最初の工程では、センサーが取得した各データをもとに、道路の形状や周囲の車両、歩行者、障害物などを認識する必要がある。自動運転車において眼となるセンサーと、脳となるAIを結ぶ作業だ。
通常、人間は経験則をもとに「自動車」や「歩行者」などを選別する。初めて遭遇したモノについても経験を重ねるにつれその特徴を学び、自然に選別・分類することを可能にしている。
AIも基本的にこの過程を通じてモノを認識する。画像に映ったさまざまなタイプの車両を「自動車」と教えることで特徴を学び、次第に応用を効かせて自動で判別するようになるのだ。
AIに学習させる手法はいくつかあるが、多くは機械学習(マシンラーニング)をベースに教師あり学習を用いる。画像などのデータに映った自動車や歩行者などをそれぞれタグ付けし、それを教師データとして、AIに「これは自動車」などと学ばせていくのだ。この作業を繰り返すことでAIは対象物の特徴を学んでいく仕組みだ。
このタグ付け作業をアノテーションといい、膨大な数のデータ1つ1つに正確にタグ付けしていく工程が必要となる。
■自動運転の要となる「位置特定技術」
データ認識が可能になると、自動運転車はセンサーが映し出したさまざまなモノを認識し、状況に応じて車両を制御する。前方に歩行者がいれば減速・停止するイメージだ。
この自動車制御の精度向上や、目的地に向け車両を走行するために必要となるのが位置特定技術や地図作成・照合技術だ。
自動運転車において地図の役割を果たす高精度3次元地図をベースとして、GPSをはじめ、地図上にタグ付けされたランドマークとの距離をもとに現在地を特定するなど、自車位置を正確に把握しながら目的へ走行するのだ。
この位置特定技術や地図作成・照合も自動運転の要(かなめ)と言える技術だ。そして、これらの作業を同時に行うことを可能とした技術が「SLAM」だ。
■注目の「SLAM」とは?
SLAMは「Simultaneous Localization and Mapping」の頭文字をとった語で「スラム」と読む。直訳すると「位置特定と地図作成を同時に行う」ことを意味し、自動運転において必須となる自車位置特定と地図作成を効率よく行うことができる技術だ。
眼となるセンサーを搭載した自動運転車などの移動体が、移動しながら周囲の環境をマッピングし、その過程で位置情報を知る何らかの目印・標識を見つけることで、相対的に自己位置を特定する。自らの移動量を算出することで、GPSなしでも位置情報を得ることができる点もポイントとなる。
■SLAMを支えるセンサー
SLAMにおいて眼となるセンサーには、主にLiDAR、カメラ、ToFセンサーが使用される。LiDARを入力センサーとして用いるものをLiDAR SLAM、カメラを用いるものをVisual SLAM、ToF(Time of Flight)センサーなどを活用したものをDepth SLAMと呼ぶ。
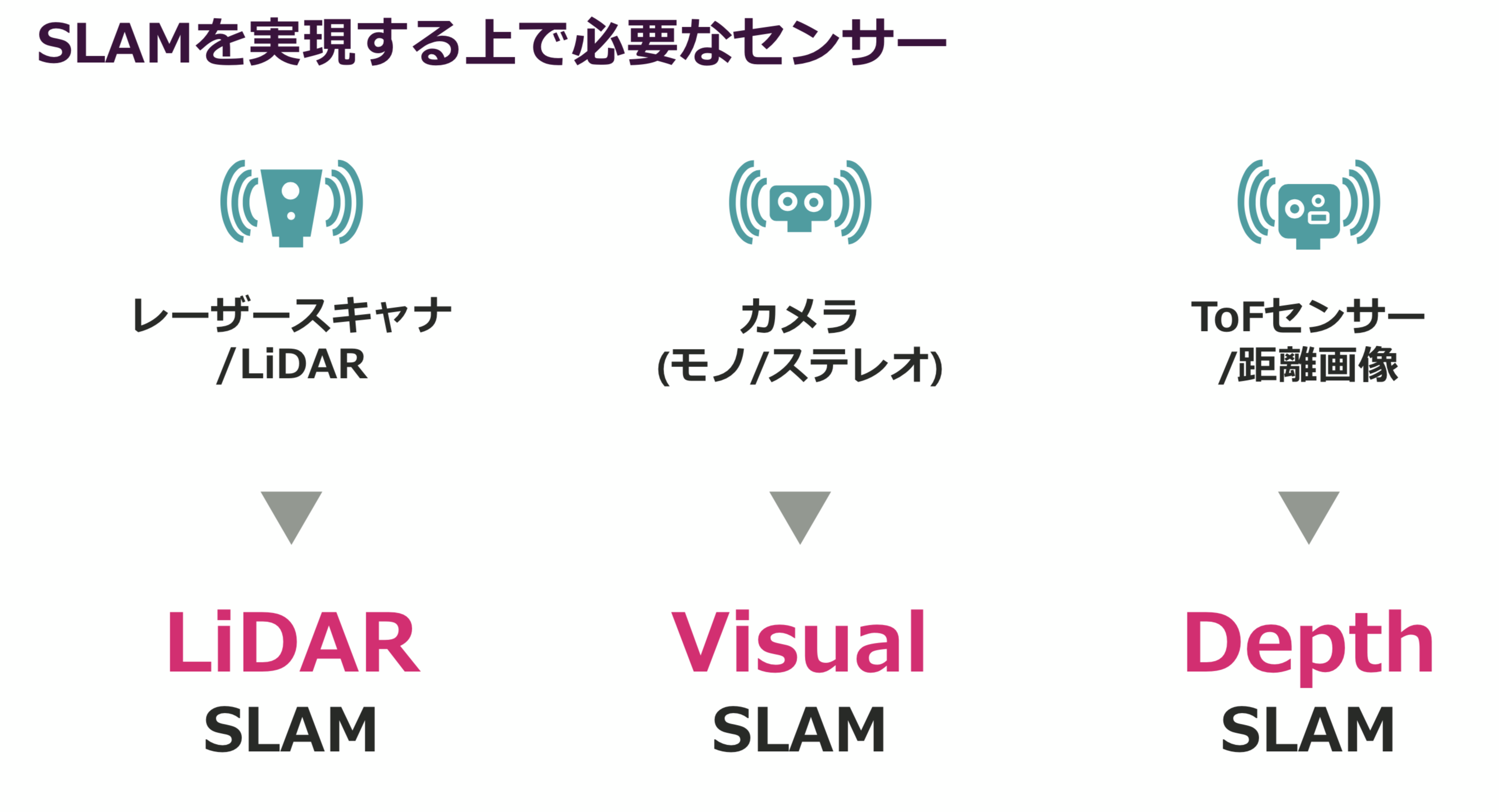
LiDAR SLAMは点群データを生成し、マッピングに優れる一方、高価でデータ負荷も高い。高精度で夜間など暗い環境でも動作可能だ。Visual SLAMはカメラの画像をもとに物体との距離を計測するシステムで、比較的安価に構成できる。より測距しやすいよう、ステレオカメラを採用する例も多いようだ。
Depth(デプス) SLAMは、センサーから取得した深度画像によって距離を計測する。光などを発し、対象物に反射して戻ってくるまでの時間によって距離を計測するToFはセンサーや、深度センサーを内蔵したデプスカメラなどが使用される。
これらの眼となるセンサーに加え、IMU(慣性計測装置)や走行距離を算出するオドメトリなどと組み合わせて使用することで、計測精度をいっそう高めることもできる。
■自動運転におけるSLAMの活用
位置特定とともに地図作成・照合を同時に行うことが可能なSLAMは、GPSなどに頼らず位置特定が可能なことから、以前は掃除ロボットなど屋内向けの機器で多用されていたが、技術の方向性や計測制度の高まりなどともに自動運転分野やドローンなど多方面で注目されている。
自動運転においては、各センサーの情報を統合してSLAMアルゴリズムで自車位置や方向、傾きなどを出力し、この情報をベースに経路計画モジュールで目的地までの経路を計算し、車両を制御する。この作業を繰り返し行うことで、自動運転車は自車位置を認識・確認しながら目的地に向かって移動することが可能になる。
■マクニカが提供するソリューション・サービス
自動運転に関するトータルソリューションを手掛けるマクニカは、AI開発向けのアノテーションサービスも行っており、Bounding Box(バウンディングボックス)やSemantic Segmentation(セマンティック・セグメンテーション)といった静止画像向けの2Dアノテーションをはじめ、LiDARから得られる3次元点群データへの3Dアノテーションにも対応している。
物体の認識関連では、代理店を務める米CeptonのLiDAR製品において、ソフトウェアを格納したエッジコンピューティングデバイスを追加し、物体の三次元データや速度を捉えて正確な位置データを算出する「Helius」や、ステレオカメラ技術を用いた超高速3次元距離測定システムを実現するITD Labなど各センサーを取り扱っている。
また、高度な3Dコンピュータービジョン技術を開発する韓国のSeoul Roboticsのソフトウェアも扱っている。LiDAR用の3D知覚ソフトウェアプラットフォーム「SENSR」は、エッジデバイスで機械学習によるリアルタイム3Dデータ処理を行うことで可能で、最小の計算要件で最高の精度を提供するという。
トータルソリューションとしては、低速走行車両向け自動運転のフルスタックソリューションを手掛ける香港PerceptInの国内展開にも力を入れており、2019年11月から2020年3月まで奈良県平城宮跡歴史公園で行われた社会実験「平城宮跡歴史公園スマートチャレンジ」では、PerceptIn Japanと共同で8人乗りの自動運転低速電動車両(LSEV)を使用したモビリティサービスを展開した。
2020年9~10月には、羽田空港跡地の「HANEDA INNOVATION CITY(羽田イノベーションシティ)」の事業の一環として、自動運転LSEVを活用した実証実験を行っている。
【参考】関連記事としては「マクニカとPerceptIn、自動運転の小型ロボタクシー事業化へ協業」「HANEDA INNOVATION CITYで、仏製自動運転バスが定常運⾏!」も参照。
HANEDA INNOVATION CITYで、仏製自動運転バスが定常運⾏! https://t.co/3PieQDhFAo @jidountenlab #自動運転 #バス #羽田
— 自動運転ラボ (@jidountenlab) September 18, 2020
■マクニカのSLAM導入支援サービス
マクニカは、モビリティソリューションの1つとしてSLAM導入支援サービスを提供しており、自動運転をはじめドローンや無人搬送車、VR・AR・MRなどさまざまな分野に応用可能だ。
また、同社はSLAMに基づく独自の人工知覚技術を自動運転やAR/VR、スマートシティなど各分野での活用を目指すKudanと2019年9月に業務提携を行っている。
マクニカの持つ半導体やセンサーシステムに関連する最先端技術と、Kudanの人工知覚(Artificial Perception)技術を組み合わせることで、センシング技術や認識・判断・制御技術、自動運転用高精度地図などの技術的課題の早期解決を図っていく方針だ。
マクニカは報道発表でKudanとの共同研究開発ソリューション・商品の例として、以下を紹介している。
- GPSに頼らずに自律ナビゲーションが可能なセンシング技術の統合及びハードウェアパッケージ商品
- Kudanが独自に開発したLiDAR+カメラのHybrid SLAMの実装により、世界的に技術課題であった市街地での車両位置認識を可能にする、超高精度な広域HDマップ生成
- 人工知能(AI)とも統合した新たなモビリティソリューション
【参考】関連記事としては「AP技術有するKudan、自動運転領域で半導体商社マクニカと提携」も参照。
■【まとめ】高度な専門技術を結集するマクニカの強みは、自動運転分野で発揮される
最先端テクノロジーを結集した技術商社として知られるマクニカ。その強みは、同じく最先端テクノロジーの集合体と言える自動運転分野で大いに発揮される。
要素技術としての認識技術やSLAM技術の活用をはじめ、トータルソリューションの枠の中で各技術を活用することもでき、さまざまな要望に応じたサービスを提供可能だ。
各分野の専門技術が結集して初めて実現する自動運転分野において、専門各社の技術を結び付ける役割を担うマクニカの存在感はひと際大きくなっているようだ。
>>第1回:自動運転の「頼りになる相談役」!開発から実装まで
>>第2回:自動運転を実現するためのプロセスとキーテクノロジーは?
>>第3回:実証実験用の自動運転車の構築からビジネス設計支援まで!
>>第5回:自動運転、認識技術とSLAMを用いた自己位置推定方法とは?

は?ロボタクシー実用化の恩恵は?")





の意味・読み方は?自動車業界の新潮流を示す")
・自動運転ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル・スズキ】欧米車種も")

