


ロボット技術やICT技術を活用したスマート農業が各地で注目されている。後継者・労働力不足に悩む農業界において、省力化や高品質生産を実現する新たな技術として開発と実用化が急速に進められている状況だ。
では、ロボット化(自動運転化)される農機はどのような仕組みで、これらの技術によってどのようなことが可能となるのか。ICTの活用により、これまでの営農がどのように変わるのか。
自動運転技術の仕組みや機能などに重点を置き、スマート農業の実態や農機メーカー各社の取り組みに迫ってみた。
記事の目次
■ロボット農機
ロボット農機のレベル
ロボット農機は、乗用車における自動運転と同様直進や旋回動作などを自動化した農業機械を指す。この動作に加え、農機特有の耕うんや収穫作業なども自動で行うことができる。
農機の自動運転技術は、オペレーター搭乗のもと運転の一部をアシスト・自動化する機能から、圃場(読み方:ほじょう ※農作物を栽培するための場所のこと)内や圃場周辺からの監視のもと無人状態で自動走行するもの、遠隔操作によって完全に自動走行するものまで研究が進められている。
農林水産省は農機の自動運転における技術水準によってレベルを定義しており、レベル0が走行や作業、非常時の緊急操作など全てをオペレーターが手動で実施する「手動操作」、レベル1が慣性計測やGPSなどを備え、直進走行など操作の一部を自動化した「搭乗状態での自動操舵」、レベル2が無人状態で農機が自動走行することが可能だが、オペレーターが圃場内や圃場周辺から常時監視し、危険の判断や非常時の操作を実施する「有人監視下での自動化・無人化、そしてレベル3がオペレーターがモニターなどで遠隔監視する下、自律制御を行う「完全無人化」となっている。
【参考】自動運転農機の開発企業については「無人トラクター・コンバインの開発企業まとめ 農業向け、自動運転技術など活用」も参照。
「農業界のテスラ」も…無人トラクター開発企業10選 自動運転技術やAI、IT技術など駆使 https://t.co/wxIgWknvkL @jidountenlab #無人 #トラクター #農業
— 自動運転ラボ (@jidountenlab) April 26, 2019
ロボット農機の仕組み
基本的には乗用車と同様GPSや準天頂衛星(QZSS)などを用いたGNSS(Global Navigation Satellite System/全球測位衛星システム)と、機体に搭載したセンサー類で自己位置を特定し、自動走行する仕組みだ。
現行モデルの多くは、GPS受信機、基地局と通信する無線機、トラクターの姿勢を計測するIMU(慣性計測装置)など移動局となるGPSユニットを農機に搭載し、GNSSによる位置情報を受信するとともに、圃場周辺に設置したRTK(Real Time Kinematic)基地局による補正情報を受信し、自己位置を特定する精度を高めている。

作業をする圃場は事前にマッピングし、走行経路を特定しておく場合が多い。農機にはレーザーや超音波ソナーなどのセンサー類が搭載されており、周辺の状況を把握するほか、遠隔監視用のカメラや運転状況をひと目で把握できる安全装置類なども搭載されている。
操作指示は、農機に搭載された端末やタブレットなどから行うことができる。
作業の流れは、クボタのロボットトラクターを例に挙げると、まず基地局や注意喚起用の看板を設置し、圃場の外周を手動で走行して圃場マップを作成する。次に、自動運転スイッチを押して降車し、トラクターの周囲を一回りしてレーザーやソナーの作動状況を確認する。そしてもう一度乗車し、走行経路や作業条件などを端末で選択すれば準備完了だ。
後は、リモコンで開始ボタンを押すとトラクターが作業開始地点まで自動で移動し、到着すると待機状態になる。再度開始を押すと圃場中央部を無人で耕うんし、外周から3周目にあたる最内周まで耕うんすると自動運転が終了する。仕上げとして、オペレーターが乗車し、残った外周2周を耕うんする仕組みとなっている。ヤンマーもほぼ同様だ。
なお、外周を自動ではなく手動で仕上げる理由は、いわゆる枕地のためだ。圃場内においてトラクターが方向転換する際、旋回する動作が必要となるが、この旋回に要するスペースは耕うんなどの作業ができず、未耕地となる。これが枕地で、作業効率を優先して枕地をそのまま残す場合もあるが、多くは最後の仕上げの段階で改めて枕地にトラクターを走らせ、ロスとなる耕地をなるべく作らないようにする。
【参考】クボタの取り組みについては「クボタが農機で展開する自動運転戦略まとめ 技術やラインナップは?」も参照。
相思相愛の「自動運転×農業」…クボタに到来する"農機バブル" イノベーションを畑で起こす https://t.co/Vqz6EGkLXy @jidountenlab #クボタ #自動運転 #農業機械
— 自動運転ラボ (@jidountenlab) January 30, 2019
■有人・無人協調システム
人が搭乗しないロボット農機と、オペレーターが搭乗した農機が同一の圃場内において併走や追走しながら協調して作業を行うシステム。クボタ、ヤンマー、イセキのロボットトラクターはいずれもこのシステムを実用化しており、1人のオペレーターによって2台が効率よく運行し、作業の省力化や生産性の向上を図ることができる。
■安全システム
人や障害物を検知する安全センサー
レーザーや超音波などで物体との距離を計測するセンサーを搭載し、周囲の人や障害物を検知した場合、自動走行を停止する機能。無人自動運転農機の作業中、圃場内に侵入した第三者への接触や自動運転農機同士の衝突など、危険を回避する。
クボタ、ヤンマー、イセキのロボットトラクターには、いずれも超音波ソナーやレーザーセンサーが搭載されている。

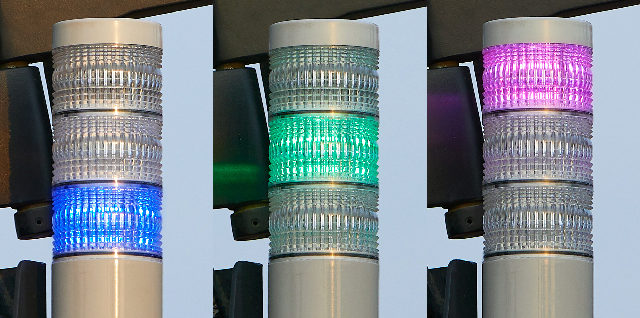
農機の作動状態がひと目でわかるセーフティランプ
自動運転や手動運転、異常発生、待機中など、農機の作動状況を離れた位置から確認できるセーフティランプが機体に備わっており、自動運転の走行状況などを監視者はじめ周囲に知らせる機能。
LED など3色のランプが搭載されていることが多く、点灯状況によってひと目で状態を確認することができる。
セーフティブレーキ
ヤンマーのロボットトラクターには、自動運転中にエンジンが停止すると自動でブレーキがかかる機能が備わっている。
また、クボタのロボットトラクターは、自動走行モード時、無人機の周囲に人や障害物を検知した場合やリモコン・GPS基地局から一定以上離れた場合に自動走行が停止する設計となっているほか、設定した走行経路から逸脱したり車両が大きく傾いた場合など、トラクターが異常を検出した場合にも自動停止する。
■自動運転システムがさまざまな農作業に対応
誤差数センチの精度で直進や旋回ができるロボ農機を活用することで、効率の良い耕うんや代かき作業が可能となるほか、自動運転のトラクターで畝立てをし、直後に手動運転による野菜移植機を走らせるといった組み合わせ作業などもできる。
現在、直進キープ機能を内蔵した田植機や、オペレーター搭乗のもと自動運転をアシストするコンバインなども実用化されており、さまざまな農作業に対応した自動運転農機の開発が着実に進んでいる。
■後付け自動操舵システムの開発も盛んに
既存のトラクターなどに後付け可能な自動走行システム製品も登場している。光学機器メーカーのトプコンは、GNSSガイダンスシステムやGNSS受信機、自動操舵を可能にする電動ハンドルなどを製品化しており、農機にGNSS受信機とコンソールをそれぞれ設置し、ハンドルを電動ハンドルに代えるだけのため、トラクターだけでなく田植え機や輸入コンバインなどにも装着することが可能という。
ISOBUS対応作業機を接続することによりコンソールから農機を直接コントロールすることができ、後進作業でも自動操舵ができる。
北海道帯広市に本社を置くICTベンチャーの農業情報設計社も2018年11月までに総額2億円の資金調達を実施し、農機の運行支援アプリや自動運転(自動操舵)機器などの開発・提供に向け大きく動き出した。
今後、ICTや自動運転技術を活用した農業ベンチャーが続々と頭角を現してくることも考えられそうだ。
【参考】農業情報設計社の取り組みについては「ICTベンチャー農業情報設計社、総額2億円を資金調達 農機の自動運転・操舵機器など提供へ」も参照。
農機を自動運転化する機器提供へ 北海道企業、2億円資金調達 住友商事などから https://t.co/RKXYL3kq6V @jidountenlab #農機 #自動運転 #北海道
— 自動運転ラボ (@jidountenlab) November 19, 2018
■IoTを活用した営農支援システムの開発も進む
自動運転技術とともに開発が進められているのが、IoTを活用した営農支援システムだ。クボタの営農支援システム「KSAS (Kubota Smart Agri System/ケーサス)」は、インターネットの地図情報を活用して圃場管理や作業記録を簡単に行う機能や、農機とKSASを連動させることで作物の収量・品質の向上や農機の順調稼動をサポートする機能などを持つ。
広範な圃場でさまざまな作物を育てている場合など、圃場ごとに作物や品種別の管理や作業管理を行うことが可能で、日誌もスマートフォンやパソコンから簡単に作成できる。このほか、資材費などのシミュレーションや食味・収量センサー付きコンバインの利用により刈り取りしながら収量と食味(タンパク値)を把握するなど、圃場ごとの成績を収集することもできる。
また、ヤンマーの「スマートアシスト」は、年間の作付け計画から作業員の作業時間や圃場の進捗状況の管理、圃場ごとに使用した肥料・農薬の種類・散布量といった栽培履歴書の作成、次年度の計画づくりまで行えるほか、機械類の異常検知やトラブルの未然防止、盗難時通報システムなども備わっている。
イセキもアグリサポートシステムを実用化しており、圃場の作業管理や肥料などの散布管理、作業工程の記録といった作業管理サポートや、農機本体の情報管理やアラート情報の管理といった機械管理サポート機能などを有している。
■農機メーカーのスマート農業への取り組み状況
自動運転農機を販売している大手メーカーのこれまでの取り組みについてまとめてみよう。
クボタ:トラクター・コンバイン・田植機と稲作の主要な農機が揃う
2016年から直進キープ機能を内蔵した田植え機やオートステアリング(自動操舵)対応のトラクターをいち早く製品化・発売したクボタは、自動運転技術を搭載した車種を多数販売している。
有人監視下における無人自動運転作業(耕うん・代かき)を可能としたアグリロボトラクター「SL60A」をはじめ、GPSを活用したオートステアリング(自動操舵)機能である「ファームパイロット」を内蔵した畑作用大型トラクター「M7シリーズ」、田植え機である「RACWEL EP8D-GS」、小型農機では国内初の自動運転モデルである小型トラクターの「NB21GS」など、多彩なラインナップだ。
2018年12月には、業界で初めて自動運転アシスト機能を付加したアグリロボコンバイン「WRH1200A」を販売し、オペレータ搭乗のもと自動運転による稲・麦の収穫作業が可能となった。
さらに、2019年9月には有人仕様の自動運転農機アグリロボトラクター「MR1000A」を、2020年1月には自動運転のアグリロボ田植機「NW8SA」を発売し、自動運転によるトラクター・コンバイン・田植機と、稲作のための主要な農機が揃っている。

【参考】関連記事としては「「自動運転×農業」が加速!クボタとNVIDIA、農業のスマート化へ協業」も参照。
ヤンマー:自動運転技術「SMARTPILOT」シリーズは第3弾まで発売
ヤンマーは2013年よりロボットトラクターの開発に着手している。2018年10月からは、自動運転技術「SMARTPILOT」を搭載したシリーズの第1弾として、無人運転が可能な「ロボットトラクター」と最小限の操作を有人で行う「オートトラクター」を販売している。
また、同シリーズの第2弾として2019年2月から密苗田植機「YR8Dオート仕様」を、第3弾として2020年1月から自動直進機能を搭載した直進アシスト田植機「YR6D/8D」を販売している。
【参考】関連記事としては「自動運転シリーズ第3弾は「自動直進」可能な田植機 ヤンマーアグリが発表、スマート農業で活躍」も参照。
自動運転シリーズ第3弾は「自動直進」可能な田植機 ヤンマーアグリが発表、スマート農業で活躍 https://t.co/8q3PehgTLk @jidountenlab #自動運転 #農機 #農業
— 自動運転ラボ (@jidountenlab) November 25, 2019
井関農機:2021年3月に新型ロボットトラクターを販売予定
井関農機は、無人運転のロボットトラクターである「TJV655R」のモニター販売を2018年12月から始めている。この機種はGNSS(全球測位衛星システム)を活用したトラクターで有人監視下での使用となるが、有人農機1台と無人ロボット1台が同時作業することが可能で、作業の省力化と生産性向上を図ることができる。
2021年3月に有人監視型のロボットトラクターを新たに販売すると発表しており、上述したトラクターの知見をもとに商品化するという。従来は田畑に無線基地局のアンテナを立てることが必須だったが、この新型トラクターでは携帯電話の電波によって測位精度を高めるVRS(仮想基準点方式)を採用し、基地局のアンテナが不要なことが特徴だ。
【参考】関連記事としては「井関農機、自動運転のロボットトラクタ「TJV655R」を販売」も参照。
夢の技術で農家さん応援!自動運転可能なロボットトラクター、井関農機が発表 農作業のICT化の一環 https://t.co/joFHZdOddk @jidountenlab #井関農機 #ロボットトラクタ #自動運転
— 自動運転ラボ (@jidountenlab) December 17, 2018
■【まとめ】新技術が続々農業分野に進出 一次産業の担い手はテクノロジー企業に
このほか、農薬散布用のドローンや酪農業における搾乳ロボットや・エサ寄せロボットの導入、さらにはICT技術を活用した大型捕獲檻によるイノシシ捕獲の実証など、新技術が次々と農業分野に進出しており、農水省の旗振りのもと自治体レベルで取り組みを加速させる例も増えているようだ。
乗用車における自動運転の実用化と比較し、限られた範囲で障害物も少なく、かつ低速で運行する農機の自動運転化は図りやすい。課題は、耕うんや代かき、苗の定植、肥料散布、収穫、生育状況に合わせた適切な管理など、多岐にわたる作業と日本の農業特有のきめ細かな品質管理とどのように両立させていくかといった点だ。
精度を増す自動運転技術とICTを活用した緻密な管理システムが、手動機械による現在の農業水準を超える日はいつ訪れるのか。一次産業の担い手が、農家や漁師からテクノロジー企業に代わる時代の到来も想定しておく必要がありそうだ。
(初稿公開日:2019年5月11日/最終更新日:2021年1月13日)
【参考】関連記事としては「【各社戦略まとめ】自動運転農業機械に秘めた可能性 スマート農業市場、2025年に120億円市場」も参照。

とは?搭載する自動車の車種は?自動運転ではない?")





の意味・読み方は?自動車業界の新潮流を示す")
ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

