

デジタル庁所管の自動運転サービス支援道普及戦略ワーキンググループがこのほど、自動運転サービス支援道の実現に向けた想定ロードマップを取りまとめた。
高速道路におけるレベル4トラックは2030年までに運用を開始するほか、モビリティハブの役割をなす物流拠点の整備方針も策定する。一般道では、従来の遠隔監視から遠隔支援を対策に含め、インターフェース標準化の検討などを行っていくという。
ロードマップの中身とともに、自動運転サービス支援道普及に向けた戦略に迫る。
▼自動運転サービス支援道 想定ロードマップ(案)
https://www.meti.go.jp/policy/mono_info_service/digital_architecture/2_siryou3roadmap.pdf
▼第2回 自動運転サービス支援道普及戦略ワーキンググループ事務局資料
https://www.meti.go.jp/policy/mono_info_service/digital_architecture/lifeline.html
記事の目次
| 編集部おすすめサービス<PR> | |
| 自動車保険 スクエアbang!(一括見積もり) 「最も安い」自動車保険を選べる!見直すなら今! |  |
| 新車定額!リースナブル(車のカーリース) お好きな車が月1万円台!頭金・初期費用なし! | |
| 車業界への転職はパソナで!(転職エージェント) 転職後の平均年収837〜1,015万円!今すぐ無料登録を | |
| タクシーアプリは「DiDi」(配車アプリ) クーポン超充実!「無料」のチャンスも! | |
| 編集部おすすめサービス<PR> | |
| スクエアbang! |  |
| 「最も安い」自動車保険を提案! | |
| リースナブル | |
| 新車が月々2万円から! | |
| パソナキャリア | |
| 転職後の平均年収837〜1,015万円 | |
| タクシーアプリDiDi | |
| クーポンが充実!「乗車無料」チャンス | |
■想定ロードマップ(案)の概要
2030年までにレベル4自動運転トラックの運用開始
ロードマップでは、2025年までを短期、2026~2030年を中期、2031~2040年を長期と位置づけ、高速道路や一般道における自動運転サービス支援道の整備や協調型自動運転(V2X)通信方式、物流拠点、データ連携基盤群、規格・標準化などの取り組み目標を定めている。
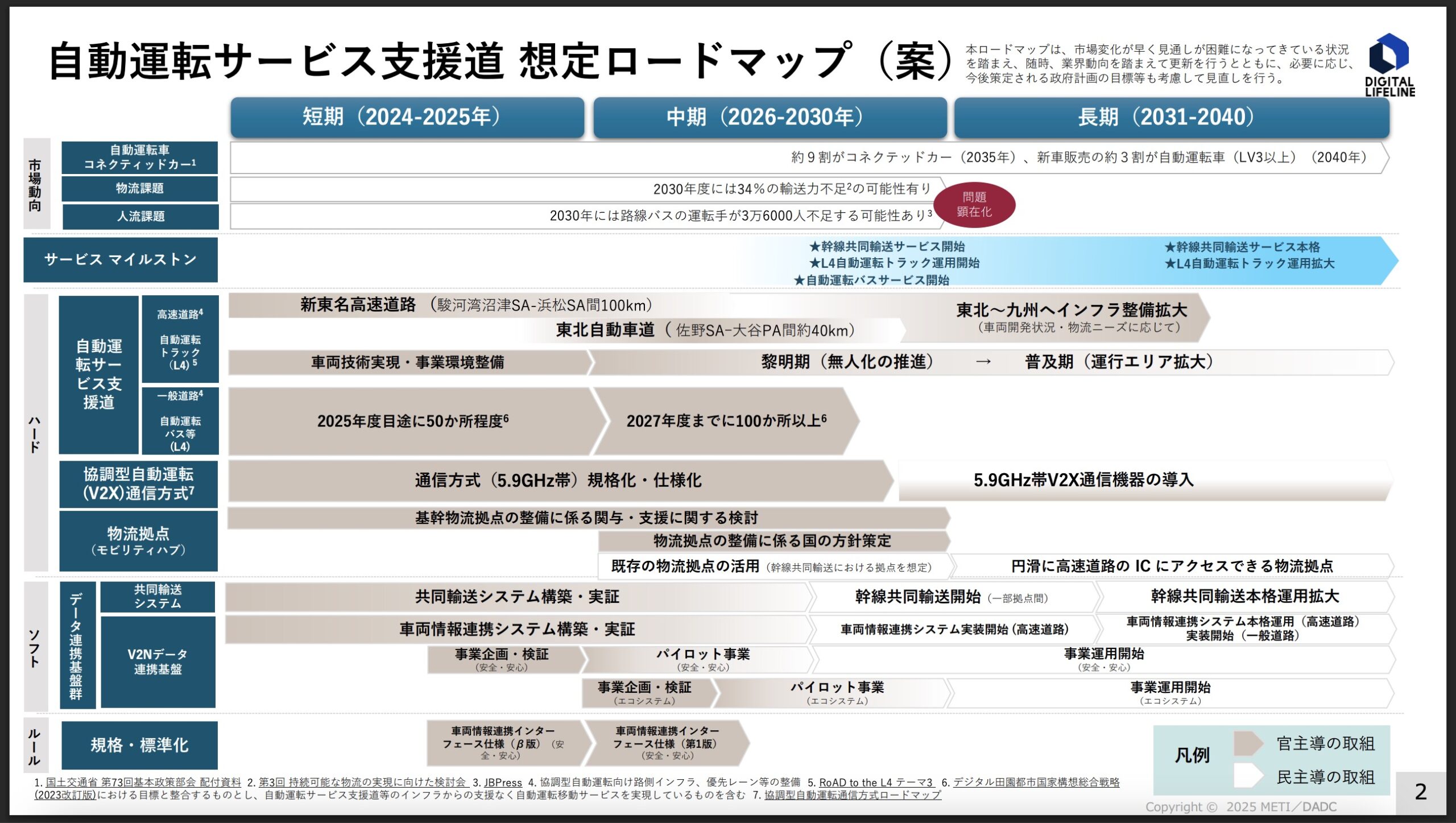
自動運転サービス支援道は、高速道路においては新東名高速道路の駿河湾沼津SA~浜松SA間約100キロを先行区間として2024年度に着手し、車両技術や事業環境の整備を進めていく。
中期的には、東北自動車道の佐野SA~大谷PA間約40キロでも取り組みを開始し、長期的に東北~九州へインフラ整備を拡大していく。中期の2030年までにレベル4自動運転トラックの運用を開始し、2030年代に拡大を図っていく計画だ。
一般道路においては、政府目標で2025年度をめどに50カ所程度、2027年度までに100カ所以上で自動運転バスなどのレベル4サービス実装を目指す。
これらの目標に合わせ、協調型自動運転におけるV2X通信方式について、中期期間中に通信方式(5.9GHz帯)の規格化・仕様化を進め、中期後半ごろをめどに5.9GHz帯V2X通信機器の導入を図っていく。
2030年までに物流拠点整備に係る国の方針策定
モビリティハブとなる物流拠点は、2030年までに基幹物流拠点の整備に係る関与・支援に関する検討を進め、物流拠点の整備に係る国の方針を策定する。並行して幹線共同輸送における拠点を想定し、既存物流拠点の活用を図り、2030年代に円滑に高速道路のICにアクセスできる物流拠点の構築を目指す。
データ連携基盤関連では、共同輸送システムの構築・実証を進め、中期中ごろから一部拠点間で幹線共同輸送を開始する。2030年代にかけて本格運用を拡大していく。
V2Nデータ連携基盤については、車両情報連携システム構築・実証を進め、高速道路において中期中ごろから車両情報連携システムの実装を開始する。2030年代にかけ高速道路で本格運用するとともに、一般道での実装も進めていく。
規格・標準化に関しては、車両情報連携インターフェース仕様のβ版を2025年までに作成し、中期中ごろまでに車両情報連携インターフェース仕様の第1版を作成する。
【参考】日本政府の実現目標については「【最新版】自動運転、日本政府の実現目標・ロードマップ一覧|実用化の現状解説」も参照。
■WGと支援道の概要
アーリーハーベストプロジェクト実施に向け議論
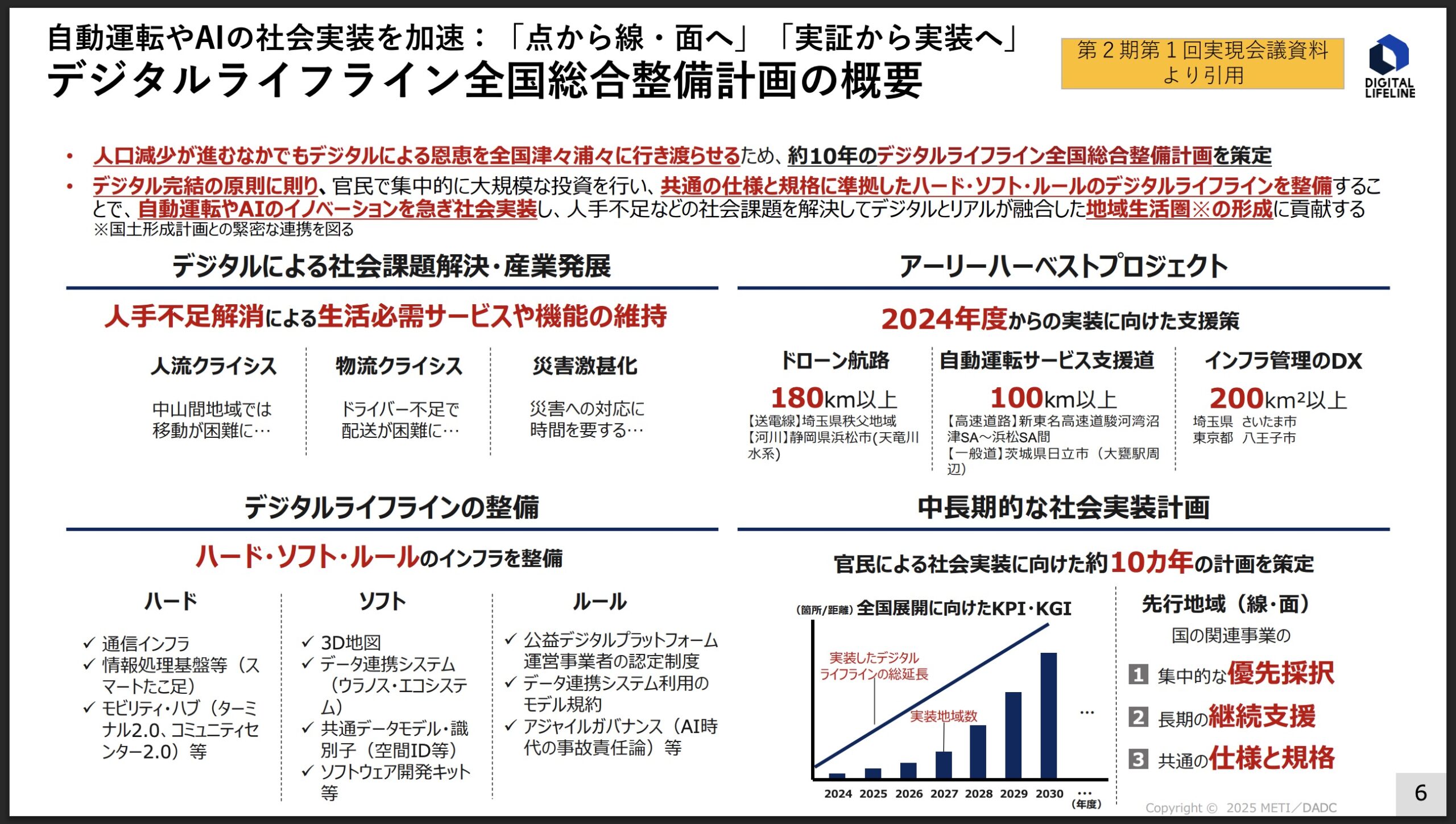
自動運転サービス支援道普及戦略WGは、デジタルライフライン全国総合整備計画に盛り込まれたアーリーハーベストプロジェクト実施に向け設置された作業グループの一つだ。
アーリーハーベストプロジェクトでは、以下に2024年度から取り組むこととされており、①はドローン航路普及戦略WG、②は自動運転サービス支援道普及戦略WG、③はインフラ管理DX普及戦略WGでそれぞれ議論が進められている。
- ①ドローン航路180キロ以上
- ②自動運転サービス支援道100キロ以上
- ③インフラ管理のDX200平方キロ以上
2024年12月に開催された第1回自動運転サービス支援道普及戦略WGでは、「共同輸送において協調すべき領域として設定していた領域の適切性や、官民の役割分担等の考え方」「車両プローブ情報等を活用したV2N実用化検討の概要やデータ連携基盤群を検討する上で議論すべき観点」「現状の課題を踏まえた一般道の自動運転サービス支援道の検討方向性(先読み情報活用、事業モデル)」が論点に設定された。
自動運転サービス支援道は高速道路、一般道路それぞれに設定
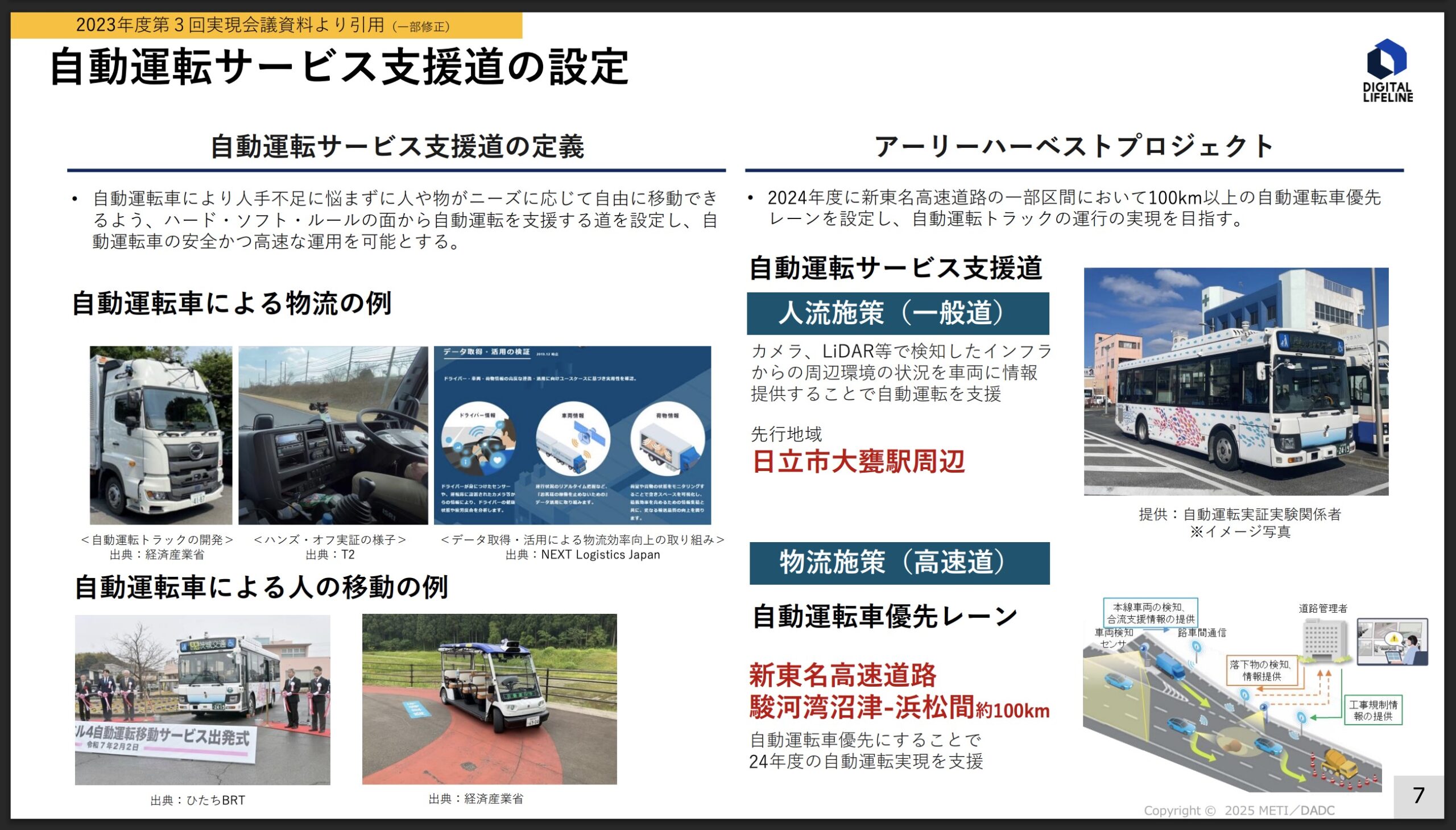
自動運転サービス支援道は「自動運転走行の安全性を高める運行環境の提供や、運行リードタイムを低減する仕組みに加え、走行データの共有やヒヤリハット情報の蓄積を行い、開発を加速するためのテスト走行が可能な道路」と定義されている。
高速道路、一般道それぞれの環境に即した路側インフラなどの在り方を精査するため、まず高速道路においては新東名高速道路の駿河湾沼津SA~浜松SA間、一般道においては茨城県日立市の大甕(おおみか)駅周辺を先行地域に選定し、2024年度に調査や実証に着手した。
高速道路は、先行区間に自動運転車優先レーンを設けて実証を行い、路側インフラからの情報提供やデータ連携基盤の要件確立や整備を進め、自動運転トラックの安全・円滑な走行や、自動運転車を想定した複数社間での共同輸配送、一部車両の走行データを収集したシミュレーションの実現を目指す。
自動運転車優先レーンは第一レーンに設定し、対象車両が優先対象車両として円滑に走行できる。常時優先レーンを設定するのではなく、平日深夜の時間帯の設定を想定している。
一般道では、日立市大甕駅周辺でデータ連携基盤を実装し、複数台による自動運転バスサービスの実装を目指す。
データ連携により、複数の運行者が同じインフラ機器の情報にアクセス・連携できる環境を構築するほか、環境情報連携システムによる自動走行支援を実現する。また、信号協調や交差点右左折支援、注意喚起表示機、ローカル5G基地局、センサー情報配信など自動運転に必要な情報配信を行う。
【参考】自動運転車優先レーンについては「高速道に「自動運転車優先レーン」!深夜時間帯に限定、新東名で」も参照。
まずは自動運転サービス支援道の仕様・運用方法などを検討
当初計画では、まず自動運転サービス支援道の仕様・運用方法などの検討・策定を進めていく方針が掲げられている。
自動運転サービス支援道の運用方法に関しては、自動運転車優先レーンの運用やデータ連携基盤の担い手・運用、交差点センサーなどの技術基準類など、ConOps(想定システムの運用計画について利害関係者指向の高い概念書)を作成する。
データモデル・連携関連では、自動運転のデータ連携基盤(ニアミス情報管理システム、車両情報連携システム、共同輸配送システムなど)を開発し、参照実装をOSSとしてGitHubで公開する。また、自動運転領域におけるデータモデルの策定及びデータ流通システムによるデータスペースを確立する。
ウラノス・エコシステムの一環として、ドローン領域・自動運転領域・インフラ管理DX領域におけるデータモデルの策定などを実施し、共通のプロトコルに基づいたデータスペースをユースケースを横断するデータ転送の機能(データ流通システム)を活用することで確立するとしている。
ハード・ソフトの仕様・規格については、自動運転の路車協調の技術検証を行い、技術基準を検討するほか、自動運転のデータ連携基盤の仕様・運用ルールの検討も進める。
先行地域での実装モデルを踏まえ、全国展開に向け自動運転サービス支援道普及戦略WG及び関連検討会において以下の事項を各省庁の実証などと連携し、議論していく。
全国展開に向けた課題と検討事項としては、以下の項目を挙げている。
- 自動運転車優先レーン等の有効性検討と今後の展開に向けた検討
- 共同輸配送のための荷詰め替えなどのモビリティ・ハブ整備方針の検討
- 物流業界の巻き込みと検討体制の構築、共同輸送システムで共有するデータ(荷物情報、パレット規格、ドライバー情報、トレサビ情報など)定義と標準化
- 自動運転とデータ連携する際の仕様統一化
- データ連携の目的の明確化、利用者(自動車業界等)との合意形成
- データ連携基盤の担い手とその運用ルール(データ管理や信頼性の担保など)の確立
- 安全監視・インシデント対応に係るオペレーションについての整理、リスク分析の実施
- リスクへの標準的な対策の検討
- 合流支援システム、先読み情報提供システム等の有効性検討
- データ連携するシステム明確化
- データ連携する車両情報(ニアミスデータ、車両が保有するプローブデータ等)の定義と標準化の検討
- 高頻度、大容量データのデータ連携、車両が保有するプローブデータ等のデータ流通の仕組み
- 欧州DFRSなど海外の路車協調の取組動向の調査と標準化戦略の策定
- 人流・物流ビジネスモデルの検討状況とその課題の整理
- 課題の対応方法とロードマップへの反映
- 自動運転サービス支援道の整備と連動した自動運転車両(バス、トラック等)の開発と普及方針
■2025年度の取り組み方針
データ連携基盤群によるデジタル化で共同輸送と自動運転を効率化
前置きが長くなったが、この指針に基づき2025年度以降の事業の進め方などについて自動運転サービス支援道普及戦略WGは議論を行ってきた。
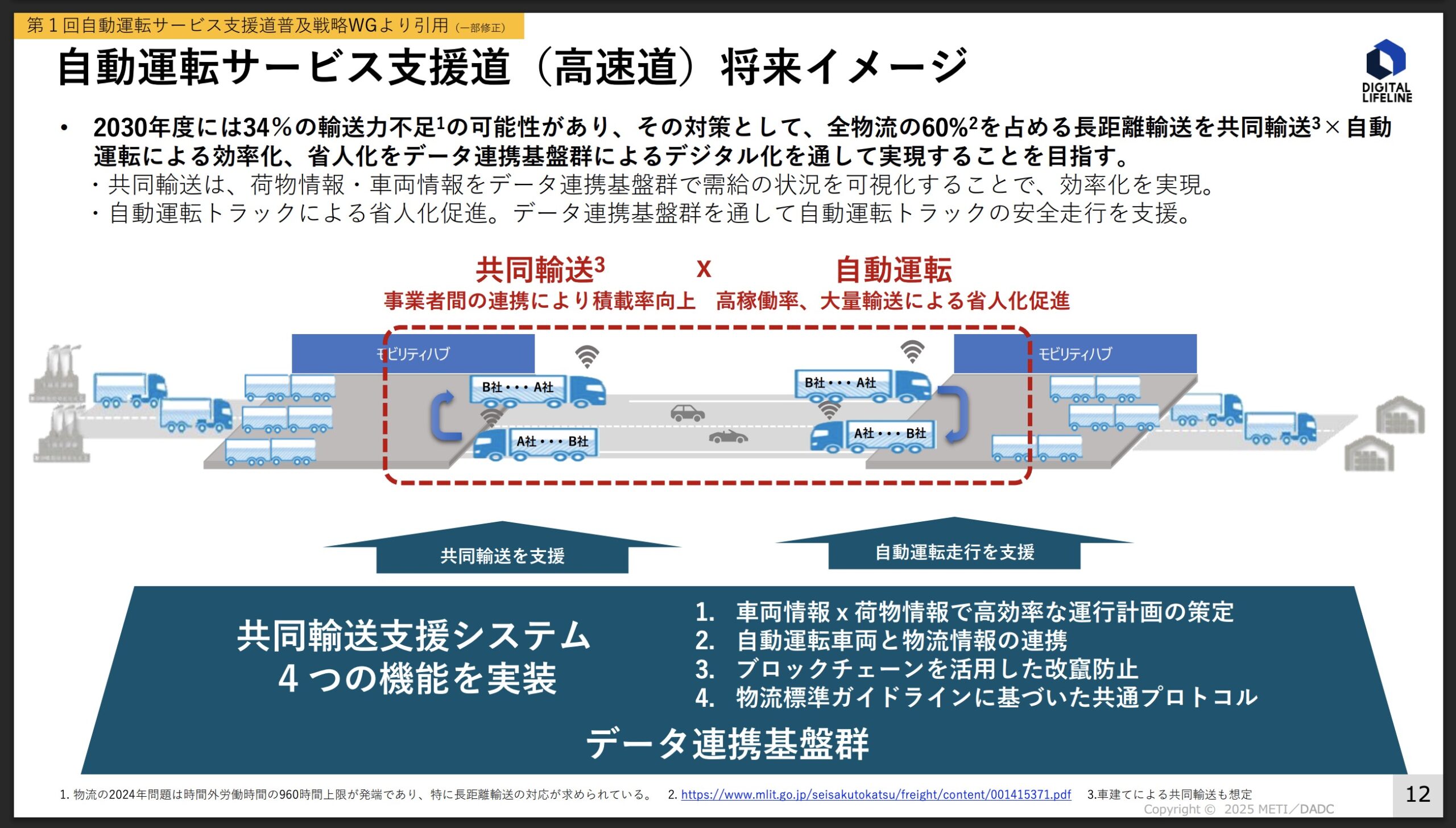
高速道路における自動運転サービス支援道の将来イメージとして、全物流の60%を占める長距離輸送に対し、データ連携基盤群によるデジタル化を通して共同輸送と自動運転による効率化・省人化を実現していく。
共同輸送支援システムとしては、以下の4機能を備えたデータ連携基盤群の構築を進める。
- ①車両情報×荷物情報で高効率な運行計画の策定
- ②自動運転車両と物流情報の連携
- ③ブロックチェーンを活用した改竄防止
- ④物流標準ガイドラインに基づいた共通プロトコル
②に関しては、自動運転運行監視システムとの連携機能として、車両情報・荷物情報・気象情報などとの連携により、リアルタイムに運行計画の見直しが可能となるシステムを考えているようだ。
これまでの事業者ヒアリングでは、自動運転の車両データや荷室寸法の標準化などについて、協調領域として実施すべきとの声があったという。
他方、データ連携や標準化の範囲や必要性を明確にするためには、業務レベルのオペレーション具体化や深掘りを行う必要があることから、2025年度は、物流事業者との検討を通して業務要件の定義や課題の抽出を実施し、データ連携や標準化の検討を行う方針が示されている。
2025年4月に高速道FOT始動
高速道路における自動運転に係る実証方針を「25年度高速道FOT(Field Operational Test)」として、2025年4月に始動する。
自動運転やモビリティDXは競争領域だが、その実現・普及展開に向けては協調して取り組むべき課題も多いものの、各省における現状の取り組みはベンチャー企業や商用OEMの参画にとどまっている。
今後の実用化・普及展開や標準化・規格化に向けては、各取り組みを連携し、レベル3~4の自動運転開発に留まらずレベル2+などの高度運転支援システムへの活用を進めるとともに、乗用車OEMの参画を始めオールジャパンでの取り組みが必要となる。
そこで、経済産業省、国土交通省、総務省などが各事業での高速道路における自動運転関連実証で協調して取り組むべき課題について密に連携し、自動運転及び安全運転支援システムを支える技術の着実な実用化と商用・乗用OEMを含む幅広い事業者の参加を呼び掛けることを目的に、合同で公募を実施する。
V2N仕様の標準化も推進
V2Nによる走行支援関連では、業界として共有すべきデータやそのフォーマット・精度などは標準化すべき課題とし、実証の在り方とともに自動車業界と議論し、実用化に向けた検討を行う。
自動運転におけるV2N通信活用では、システム―車両間の通信状況(通信速度、通信遅延、常時接続性)を検証すべき事項とし、実走行環境においてV2N通信環境が有望なユースケースに応じて要件に資するのかを検証するほか、通信品質改善策の効果検証、車両関係者による有効性などの評価を行う。
プローブ活用においては、欧州DFRSを参考として、協調領域の事業としてAggregator機能とCreator機能を設定する。Creator機能については、安全・安心に係るユースケースなどは協調領域とし、その際サービス品質が担保できる運用が可能かについては継続議論を行う。
一般道では遠隔支援を検討
一般道における自動運転サービス支援道関連では、高速道と比較して環境が多様なためまずは車両側の制御能力向上が重要とし、既存の研究開発や社会実装プロジェクトでの車両技術開発の成果や、各社への開発補助などの成果の横展開を推進していく。
その上で、車両側での自律的な認識が及ばない領域については、他の車両などからの情報を活用する仕組みを整備する必要があるとしている。具体的には、車両プローブを活用したV2N連携により、 交通環境情報を「先読み情報」として活用するデータ連携基盤群を開発する。
実証を進めているみちのりHDによると、実際に手動介入が1.4回/走行3.1キロの頻度で発生しており、運転手は減らせても監視員が必要なうえ、現場に駆け付ける人手も必要という。
無人の自動運行継続を実現するため、従来の遠隔監視から遠隔支援を対策として検討する。2025年度は、遠隔支援に必要となるインターフェースについて、その範囲と標準化の必要性を検討し、将来の自動運転サービス普及に向けた技術検討を行う。
また、事業性として、自動運行継続による効果や地域集約による効果などを費用対効果含め試算し、事業モデルとしての成立性検討を行うとしている。
データ共有可能な安全性評価シミュレーションの活用
自動運転の普及展開に必要不可欠な安全性評価手法において、シミュレーションの活用に関する議論が始まっているが、プライバシーやフォーマットの不統一の問題に加え各社の設計思想と連動するため、各社が個別に開発しているのが現状だ。
そこで、収集したニアミス情報をシミュレーションに置き換えることで匿名化・デジタル化を図り、関係者間でデータを共有できる環境を作り、自動運転の安全性評価におけるシミュレーションの活用の在り方について、世界に先駆けて検討を開始する。同時に、これらの情報活用のためのデータ連携基盤への要求項目を明らかにする。
■【まとめ】高速道路レベル4を可能にする自家用車の動向にも注目
デジタルライフライン全国総合整備計画のもと進められる自動運転サービス支援道には、自動運転サービス支援道普及戦略WGのほか自動運転インフラ検討会やモビリティDX検討会、RoAD to the L4などさまざまな作業部会やプロジェクトが関わり、横断的な取り組みが進められていく見込みだ。
2030年までの運行を目指す高速道路におけるレベル4トラック関連では、自家用車におけるレベル4の動向にも注目したい。2030年ごろには、高速道路レベル4を可能にする自家用車が登場していてもおかしくない。先々を見通した戦略と柔軟な制度設計などが求められることになる。
一般道においては、海外勢含め開発各社の自動運転システムの性能差が今後開いていくのかどうか、またどれほどのスピードで進化していくのかも重要となる。どの水準に焦点を合わせるかによって、国の取り組みの有効性が左右されるためだ。
日進月歩で成長を遂げ続ける自動運転技術。2030年ごろには、果たしてどの水準に達しているのか。先々を見通す力も試されそうだ。
※自動運転ラボの資料解説記事は「タグ:資料解説|自動運転ラボ」でまとめて発信しています。
【参考】高速道路におけるレベル4トラックに関する取り組みについては「ヤマト運輸、「自動運転配送」に参入へ 日野トラック系とタッグ」も参照。




・自動運転ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル・スズキ】欧米車種も")


の意味・読み方は?自動車業界の新潮流を示す")

