


国土交通省の国土技術政策総合研究所はこのほど、「一般道路における自動運転サービスの社会実装に向けた研究」と題した研究資料を公開した。
道の駅などを拠点に自動運転サービス実現に向けた実証実験をもとに、実証走行中における手動介入発生要因の分析と、社会受容性の把握に向けた調査結果をまとめた内容だ。
この記事では、同研究資料の内容を解説していく。
▼一般道路における自動運転サービスの社会実装に向けた研究~手動介入発生要因の特定と対策及び社会受容性の把握~
http://www.nilim.go.jp/lab/bcg/siryou/tnn/tnn1161pdf/ks1161.pdf
記事の目次
■実証実験の概要
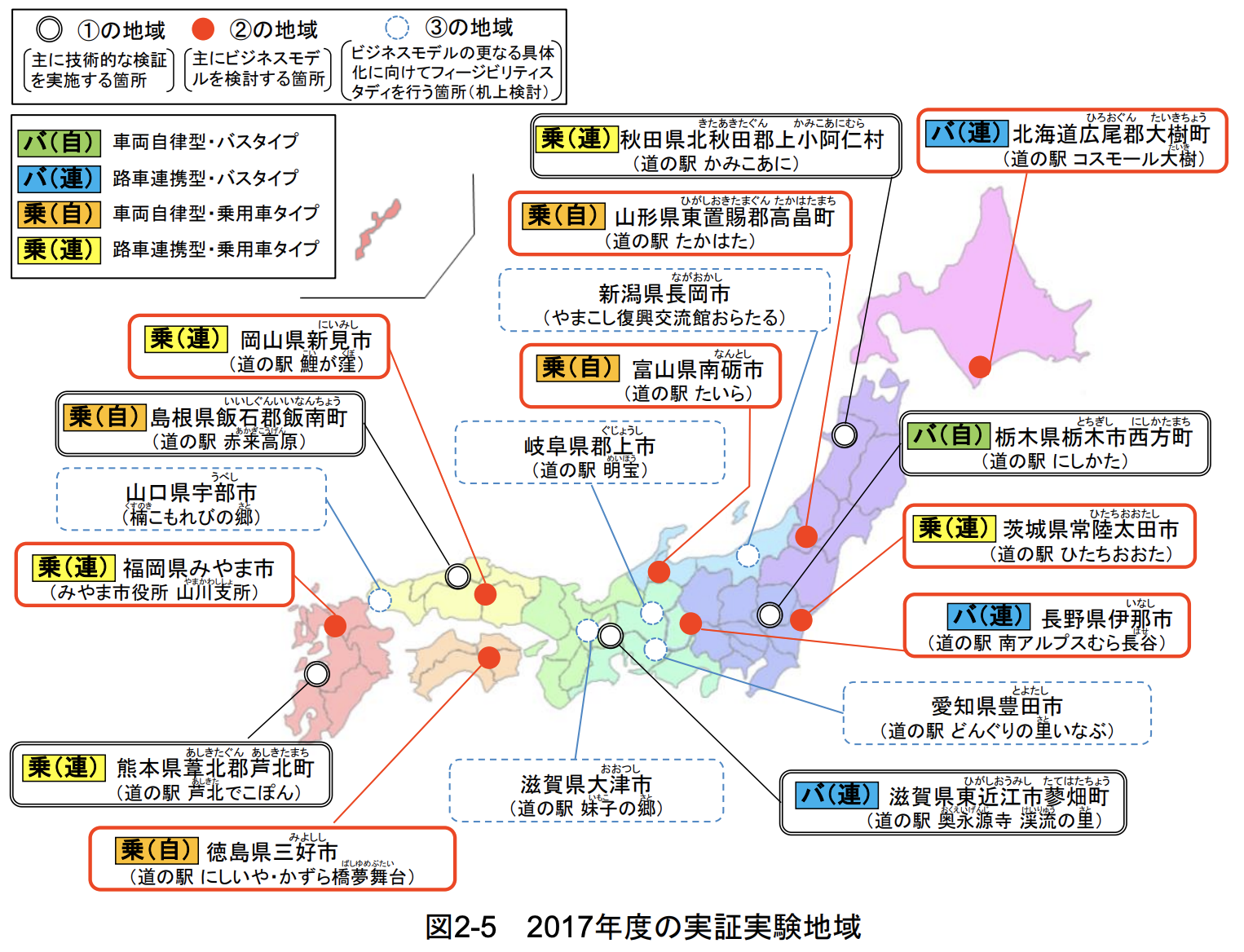
国土交通省は、全国に先駆けて高齢化が進展する中山間地域への自動運転技術の導入を目指し、「中山間地域における道の駅等を拠点とした自動運転サービスの実証実験」を2017年度に開始した。
2017年度に13カ所で短期実験が行われたほか、2018年度には短期実験5カ所、長期実験4カ所、2019年度は長期実験3カ所、社会実装1カ所(秋田県上小阿仁村の道の駅かみこあに)、2020年度は自治体独自の取り組みを含め短期実験、長期実験がそれぞれ1カ所で行われている。2021年度は、新たに滋賀県東近江市の道の駅奥永源寺渓流の里で社会実装されている。
今回の研究調査は2017年度に行われた13カ所の実証実験を基にしている。
【参考】道の駅を拠点とした自動運転実証については「いま道の駅が自動運転のサービス拠点として注目を集めている」も参照。道の駅かみこあにについては「道の駅と集落結ぶ自動運転サービス、商用化が決定!まず秋田で」も参照。道の駅奥永源寺渓流の里については「運賃150円の自動運転サービス、滋賀県の道の駅で始動!全国2例目、電磁誘導型」も参照。
■手動介入発生要因の調査
路上駐車が全体の17%を占める
2017年度に実施された13カ所の実証実験から得られた総走行距離2200キロのうち、試乗などのイベントを除いた1,740キロのデータをもとに分析した結果、手動介入回数は計1,046回に上った。発生場所別では、単路56%、交差点と道の駅などの駐車場がそれぞれ5%、その他34%となっている。
要因別では、多い順に以下の通りとなっている。いずれも単路における手動介入だ。
- ①路上駐車183回(全体の17%)
- ②GPSなどの自車位置特定不具合121回(全体の12%)
- ③対向車とのすれ違い75回(全体の7%)
- ④自転車・歩行者68回(全体の7%)
- ⑤除雪した路側の雪55回(全体の5%)
以下、交差点における右折待ち・道譲り53回、駐車場などにおける駐車車両45回、雑草など49回、単路における追い越し・道譲り23回と続く。このほか、運転者の操作ミスやチューニングで解決可能なもの、システムの誤作動、緊急車両の回避など「その他」の要因が計358回を数える。
路上駐車による手動介入は沿道状況によるところが大きく、特に人家が連続または集中している区域では走行距離10キロあたり1.8回発生する一方、山間部や田畑においてはほとんど発生しなかったという。
自車位置特定不具合が第2位に
GPSなどの自車位置特定不具合では、高精度GPSはGPS信号の衛生補足数の低下や情報遅延により位置測定精度が低下することがあった。道路状況別では、走行10キロあたり山間部で1.7回、人家集中区域で1.4回、橋梁直下などその他0.5回となっており、樹木や建物などがGPS信号を遮ったとしている。
LiDARを活用した自車位置特定では、雪や霧などによる検知精度の低下が見られた。LiDARは降雪中の雪の粒も検知しており、これが増加すると周辺の検知精度に不具合が生じるため、地域や気象条件などによっては、自車位置特定の補助施設が必要としている。
一方、路面化に設置した電磁誘導線や磁気マーカーを活用した自車位置特定補助は、山間部や降雪時においても安定した自動運転を継続できることを確認したとしている。
自転車や歩行者は、沿道に歩道が整備されている道路では手動介入が発生しない一方、一車線道路で歩道がなく路肩がある道路では走行10キロあたり0.5回、路肩のない道路では0.6回手動介入が発生した。
追い越し・道譲りでは、実証で使用した自動運転車が一般車両と比較し走行速度が低いことから、後続車の滞留や無理な追い越しが発生する場面があったとしている。
対向車とのすれ違いでは、狭い道路などで前方から走行してきた一般車両とすれ違うことができず、立ち往生する場面があった。一般車両のように道を譲り合うコミュニケーションが現状困難としている。
このほか、道路管理上の課題に起因する手動介入として、沿道民家などの植栽が走行ルートにはみ出しているケースや、道路脇への除雪によって幅員が狭くなっているケースなどを挙げている。手動介入は2車線道路より1車線道路で多くなっており、自動運転の円滑な運行には適切な幅員の確保や道路管理が必要としている。
手動介入発生を抑制する対策
自動運転車が円滑に走行するために有効な対策として、以下の4点を挙げている。
- ①道路構造
- ②道路管理
- ③自車位置特定を補助する施設
- ④その他広報や車両提供者との協力
①では、歩行者や自転車の通行区間の明示との組み合わせなどによって車両や歩行者が通行するスペースを確保したうえで、双方の空間を分離する対策や、適切な間隔で道路に待避所を設置し、有線通行のルールを決定すること、道路の一方通行化など車両同士のすれ違いが発生しない規制、簡易信号の設置、実勢速度を踏まえたルートの選定、通行路の明示や看板などにより自動運転車のルートを周知し路上駐車を抑制、自動運転車専用空間の設計などを挙げている。
②では、地域の協力による道路管理レベルの向上や、夏用・冬用の走行位置をそれぞれ設定し道路脇の除雪に対応可能な管理、適切な排雪など除雪レベルの検討などを挙げている。
③では、磁気マーカーや電磁誘導線、路車連携技術を活用し、GPS信号が入らない地域でも自車位置を特定し走行できる工夫や、車両提供者との協力のもと、ミリ波レーダーなどのセンサー組み合わせより悪天候時も自車位置を特定できる車両特性の検討などを挙げている。
④では、自動運転車に対する理解の醸成や、車両提供者の協力のもと上り坂を障害物と検知しないチューニングの実施などを挙げている。
対策事例と効果
道の駅芦北でこぽんでは、路上駐車の抑制を目的に路面標示を設置したところ、1日あたり1.56回発生した手動介入が0.5回に減少した。
みやま市役所山川支所では、自動運転車の優先走行を促すことを目的に看板や路面標示を設置し、地域住民らにアンケート調査を実施したところ、全体の3割以上が認知しており、そのうちの3割近くが迂回や通行時間をシフトするなどしており、一定の効果が見られたようだ。
道の駅奥永源寺渓流の里では、路上駐車の抑制や自動運転車の優先通行を促すことを目的に看板や路面標示の設置、また一般車両との譲り合い目的に待避所の明示や接近表示板の設置を行ったところ、歩行者や自転車を要因とする手動介入は28回から17回に、路上駐車を要因とする手動介入は14回から5回に減少した。
アンケート調査では、自動運転車の存在を意識して通行したという回答が、路面標示で約6割、看板で約7割得られたという。接近表示板も、自動運転車が通過するのを待ったという回答が約8割得られたようだ。
専用空間を設置した道の駅赤来高原では、混在空間と専用空間の手動介入を比較したところ、専用空間では一度も手動介入が発生しなかった。
専用空間の設置はもちろん、いずれの実証エリアにおいても看板などの設置も一定の効果を果たす結果となっているようだ。
■社会受容性に関する調査結果
社会受容性に関しては、乗車モニターや近隣住民、運転車を対象にアンケート調査を実施し、以下の4つの観点から考察を行っている。アンケート回答数は設問など状況により異なるが、概ね1,100~1,200となっている。
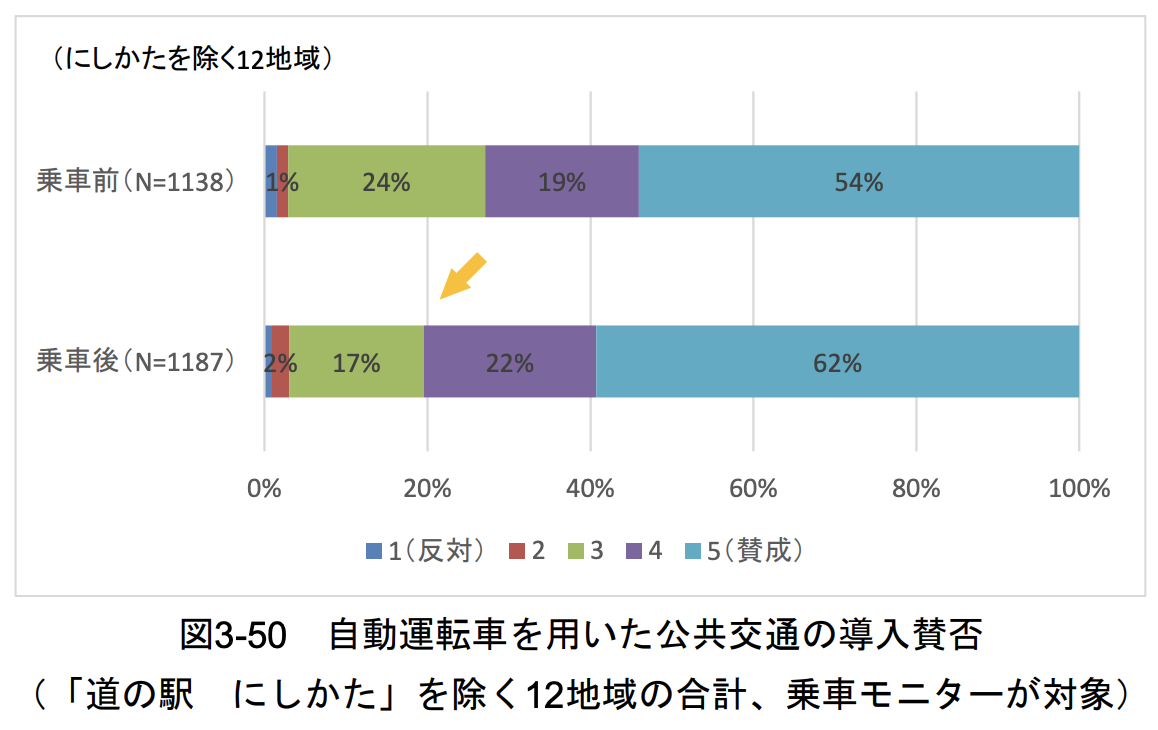
- ①自動運転車を用いた公共交通の導入賛否
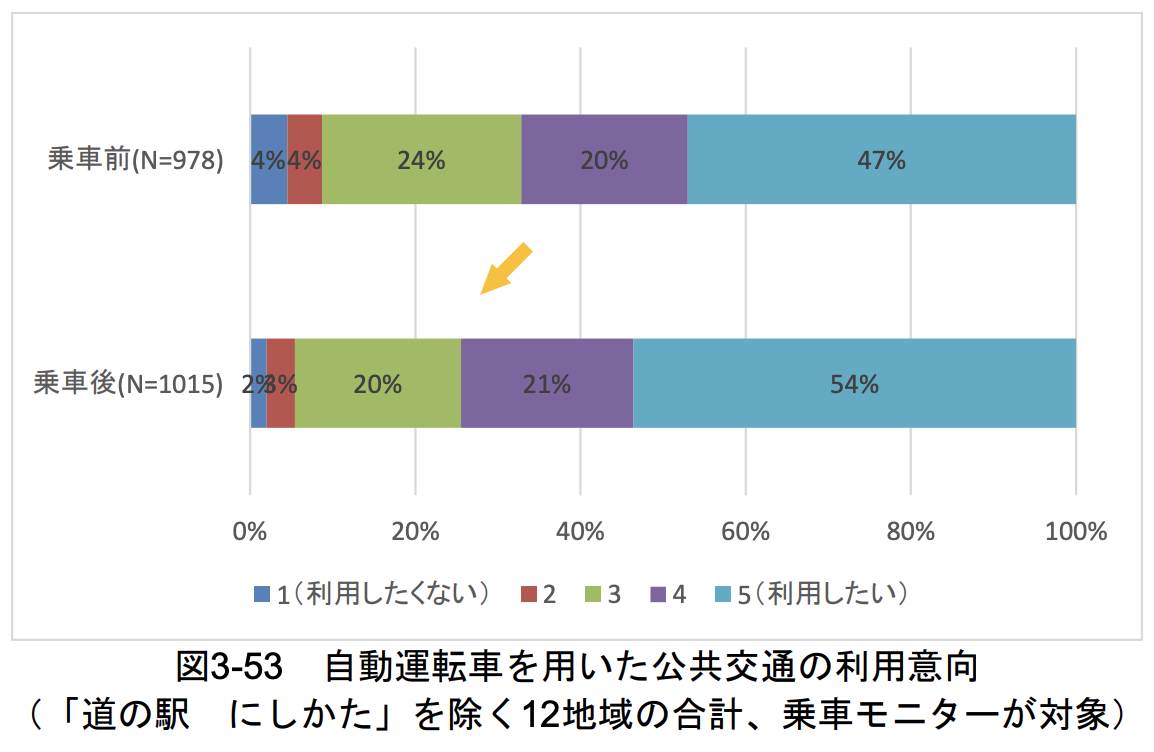
- ②自動運転車を用いた公共交通の利用意向
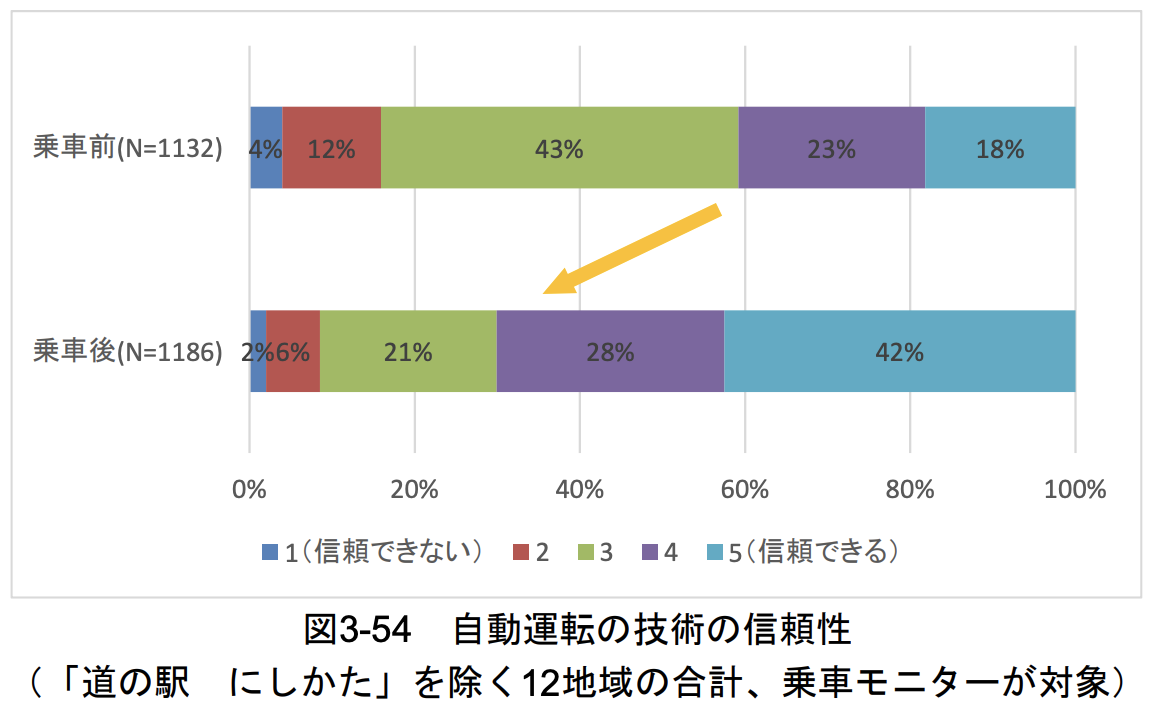
- ③自動運転技術の信頼性
- ④自動運転サービスによる外出機会への影響
①では、乗車モニターを対象としたアンケートにおいて、乗車前後で賛成意見が73%から84%に増加した(以下の表における「4」と「5」の合計)。実際に体験することで自動運転への理解が深まった格好だ。
②も①同様乗車モニターを対象に乗車前後でアンケートをとったところ、67%から75%に増加した(以下の表における「4」と「5」の合計)。なお、①と単純比較した場合、参戦意見に比べ利用意向が低い傾向にあるため、公共交通への導入そのものについては賛成しているものの、自身の利用は想定していない人が一定数存在する可能性があるとしている。
③も①、②同様乗車モニターを対象に乗車前後でアンケートをとったところ、「信頼できない」(以下の表における「1」と「2」の合計)とした人は16%から8%に減少した一方、「信頼できる」(以下の表における「4」と「5」の合計)とした人は41%から70%へと大幅に増加する結果となった。
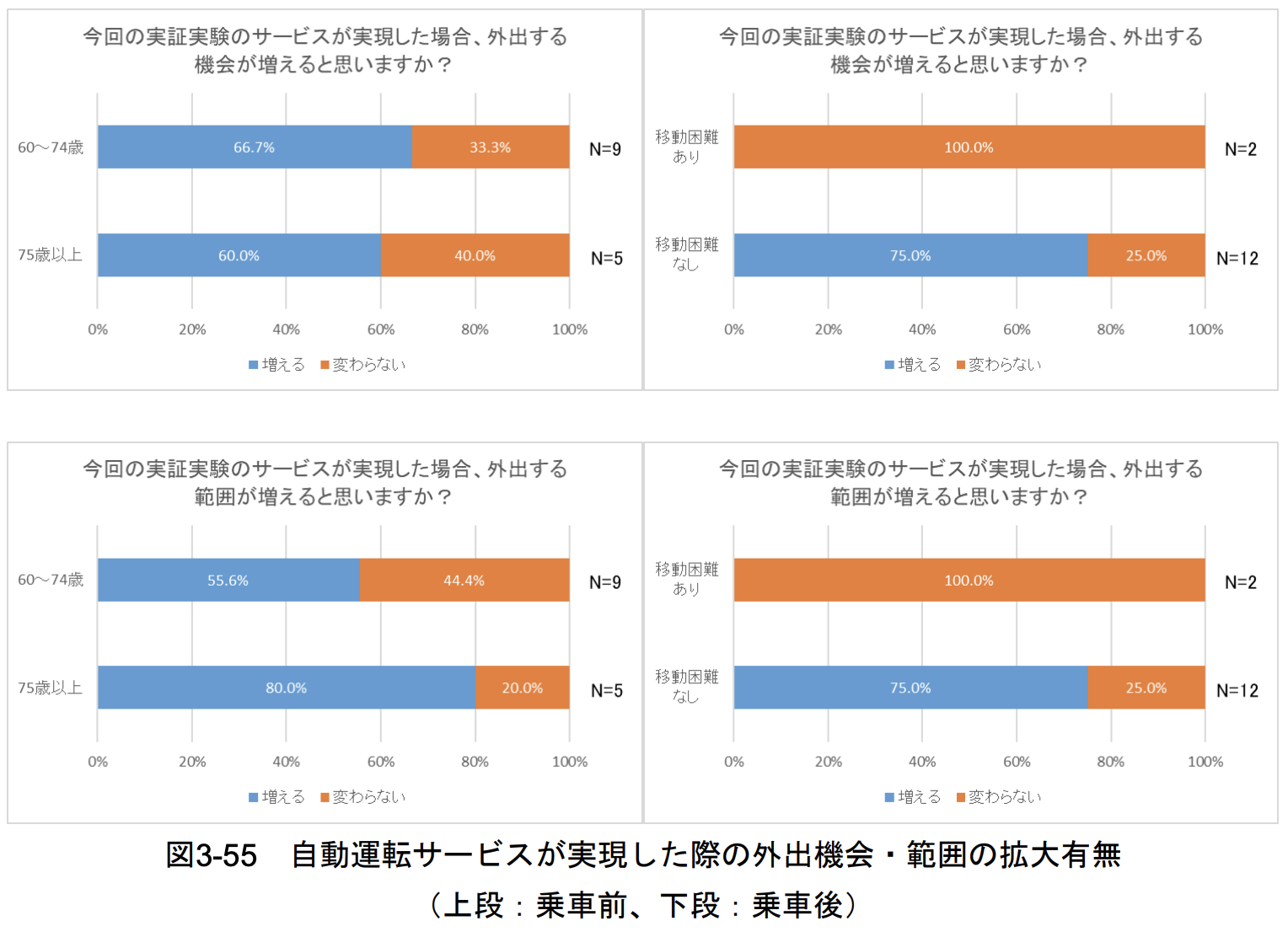
④は、乗車モニターを対象に年齢や移動困難の状況別に集計を行ったところ、年齢を問わず回答者の過半数が外出機会や範囲が増加すると回答した。中でも、75歳以上の回答者の80%が外出範囲の増加に期待を寄せていることがわかった。
一方、サンプル数は少ないものの、移動に困難のある回答者はいずれも外出機会・範囲は変わらないと回答したようだ。
■【まとめ】自動運転技術の実装には周囲の理解・協力が必須
「自動運転車は駐車車両も避けられないのか」と思う人がいるかもしれないが、駐車車両の回避は意外と難儀な要素を含む。手動運転の場合、道路幅によるが適正距離を置かず車両の側方をギリギリで通過したり、対向車線にはみ出してかわしたりすることもあるが、自動運転車は駐車車両から適正な距離を保ち、安全を確保したうえで走行する。対向車線へのはみ出しも、本来許容されるべき行為ではないため慎重を期す必要があるのだ。
自動運転技術の社会実装においては、歩行者が介在しない専用空間や低速走行限定など、実装しやすい環境から進めていくことが近道となる。ただ、利便性や設備投資などの面から、専用空間を整備できず混在空間を走行するケースが大半を占める。
このため、自動運転車が少しでも走行しやすい環境を構築するには、周囲の理解・協力・配慮が絶対不可欠となる。自動運転サービスの実装が始まった今、社会受容性のさらなる向上も大きな課題になりそうだ。
【参考】関連記事としては「自動運転などCASE実現へ、国が重視すべき新ワード「LIST」とは?法律、インフラ、社会受容性、技術振興」も参照。

とは?いつ実現?")





の意味・読み方は?自動車業界の新潮流を示す")
ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

