


経済産業省が、「E2Eに係る安全性評価方法の確立事業」に係る委託先の公募を開始した。令和7年度補正による予算80億円規模の自動運転事業だ。
E2E(エンドツーエンド)モデルは、いわゆるテスラ方式の自由度の高い自動運転技術だ。自由度に比例して実用化の難易度も高いが、高市政権はこのE2E開発に力を入れていく……ということだろうか。
同事業の中身とともに、自動運転開発のトレンドに迫る。
記事の目次
| 編集部おすすめサービス<PR> | |
| 自動車保険 スクエアbang!(一括見積もり) 「最も安い」自動車保険を選べる!見直すなら今! |  |
| 新車定額!リースナブル(車のカーリース) お好きな車が月1万円台!頭金・初期費用なし! | |
| 車業界への転職はパソナで!(転職エージェント) 転職後の平均年収837〜1,015万円!今すぐ無料登録を | |
| タクシーアプリは「DiDi」(配車アプリ) クーポン超充実!「無料」のチャンスも! | |
| 編集部おすすめサービス<PR> | |
| スクエアbang! |  |
| 「最も安い」自動車保険を提案! | |
| リースナブル | |
| 新車が月々2万円から! | |
| パソナキャリア | |
| 転職後の平均年収837〜1,015万円 | |
| タクシーアプリDiDi | |
| クーポンが充実!「乗車無料」チャンス | |
■E2Eに係る安全性評価方法の確立事業の概要
E2E判断に対し安全性評価手法を確立
経産省は、E2E車両の安全性の検証・向上に向け、安全性評価手法の確立やE2Eによる自動運転を補助する機能の確立、E2Eに関する国内外調査などに関する委託事業を2026年2月23日まで募集している。
▼令和7年度補正「E2Eに係る安全性評価方法の確立事業」に係る委託先の公募(企画競争)
https://www.meti.go.jp/information/publicoffer/kobo/2026/k260123002.html
▼募集要領
https://www.meti.go.jp/information/publicoffer/kobo/2026/downloadfiles/k260123002_1.pdf
E2Eは自動運転ソフトウェア開発における新たなアプローチで、従来のアプローチであるルールベースのモジュール型と異なり、多額のコストがかかる高精度三次元地図が不要で拡張可能性が高く、競争環境を一変させる革新的手法とされる。
一方、AIの判断根拠が不透明でブラックボックスになりやすく、安全性の評価方法が確立していないことが実装に向けた課題の一つに挙げられている。安全性は、走行テストなどを行って統計的・確率論的に検証・説明するアプローチが考えられるが、実環境で極端なケースに遭遇する可能性は低く、膨大な回数のテストを行う必要があることから、実走行ですべてを網羅することは困難としている。
そこで、国際動向を踏まえながら、シミュレーションなどを活用した安全性評価手法・開発手法を確立するための事業を行うこととした。
また、E2Eを搭載した自動運転車両の安全性を高めるため、E2Eによる自動運転を補助する機能のあり方や、E2Eがハードウェアを的確・安全に挙動させられるかの検証方法についても検討する。
並行して、経産省や関係省庁、関係団体と連携した会議体を設置し、安全性評価に係る国際標準化の推進戦略など、E2E車両の社会実装加速に資する制度整備を進めるための検討を行うこととしている。
国際的議論見据えE2E調査を本格化
委託事業では、以下を行う。
- ①全体統括
- ②シミュレーションを活用したE2Eの安全性評価手法の確立
- ③E2Eによる自動運転を補助する機能の確立
- ④E2Eがハードウェアを的確・安全に挙動させられるかの検証方法の確立
- ⑤E2Eに関する国内外調査
①では、同事業における検証の成果を、国際基準・標準(国連WP29、ISOなど)や国内法令・制度の検討に向けた議論への反映を目指し、その反映に向けたロードマップを作成する。
また、政府や企業、団体などが参加する有識者会議を設置し、事業の実施状況や成果イメージについて、E2Eに係る最新の技術動向や海外動向、国内外のルールとの適合性など、幅広い観点で専門的な見地から助言を受けられる体制を構築する。
②では、将来的にE2E車両の円滑な社会実装が進むよう、E2Eの安全性評価手法について国際的議論や国内法規などへの反映を目指し、検証を行う。
検証にあたっては、前提となる安全性に関する考え方の整理を行い、E2Eを含めた自動運転の安全性評価に係るWP29やISOなどの国際的な議論、国内法規の検討状況、自動車業界における議論、海外を含めた最新の技術動向を踏まえる。
また、AIの安全性・信頼性確保に向けた統計的手法やシミュレーション活用の在り方など、安全性評価手法の具体化を図る。シミュレーション活用については、実車を代替できるだけの一致性があることを確認する手段・手順を考案する。
将来的な認可・認証を見据えた場合のE2Eの安全性評価手法の実現可能性を担保するため、実際の走行による実証に加えてシミュレーションを活用した実証を行うことなどにより、その妥当性について検証する。車両開発を念頭に、自動車メーカーやサプライヤーなどの開発事業者からフィードバックを受けることとしている。
③については、E2E車両の安全性を高めるため、E2E AIによる自動運転を補助する付加的機能を探索し、当該機能に必要となる要件を定義し、その有効性・妥当性について検証を行う。
④に関しては、シミュレーション環境上でE2Eとハードウェアが一体となって的確・安全に挙動することの可視化と評価をするための手法について検証する。
事業実施期間は契約締結日から令和8年3月31日となっており、必要に応じて予算の繰り越し手続きを行う予定としている。予算規模は80億円を上限とする。
■日本の自動運転戦略
モビリティDX戦略のもと研究開発を推進
国もE2E開発・実用化に向け大きく舵を切り始めたのは間違いないが、この動きは厳密に言えば高市政権によるものではない。岸田政権下・石破政権下で策定・改訂された「モビリティDX戦略」に基づく取り組みだ。
同戦略は、官民での議論から導き出した2030~2035年に向けた勝ち筋として、ソフトウェア・ディファインド・ビークル(SDV)や自動運転、MaaSといった新たなモビリティサービス、企業を超えたデータ利活用など、DX全体を貫く戦略として2024年5月に策定された。
▼モビリティDX戦略・モビリティDX検討会
https://www.meti.go.jp/policy/mono_info_service/mono/automobile/jido_soko/index.html
競争が生じていく主要3領域に①車両の開発・設計の抜本的な刷新(車両のSDV化)②自動運転・MaaS技術などを活用した新たなモビリティサービスの提供③データの利活用を通じた新たな価値の創造――を据え、関係者の認識をそろえリソースを結集していくため、2030年~2035年に向けた勝ち筋として、今後10年間を3ステップに分け各分野における取り組みを進めて行く。
2027年までをフェーズ1とし、開発・実証環境の整備、要素技術の確立などを通じて世界と戦える基盤を作る。半導体や高精度3次元地図といった要素技術の確立や、シミュレーション環境やAPIなど協調基盤の確立を進める。
2030年までのフェーズ2では、要素技術を統合・実装したSDV車両の普及やSDVを活用した新たなサービスの普及など、構築した基盤や要素技術の統合・実装によって新たなビジネスモデルを構築する。
2035年までのフェーズ3では、SDV車両の低コスト化と機能・サービス拡張や、グローバルな競争力の獲得・マーケットの拡大を進めていく方針だ。
【参考】関連記事「日本政府、なんと公用車に「自動運転車」採用へ」も参照。
戦略アップデートでE2E事業を追加
この時点では「E2E」の文字は一つもなかったが、2025年6月に発表されたアップデート版でE2Eが盛り込まれた。
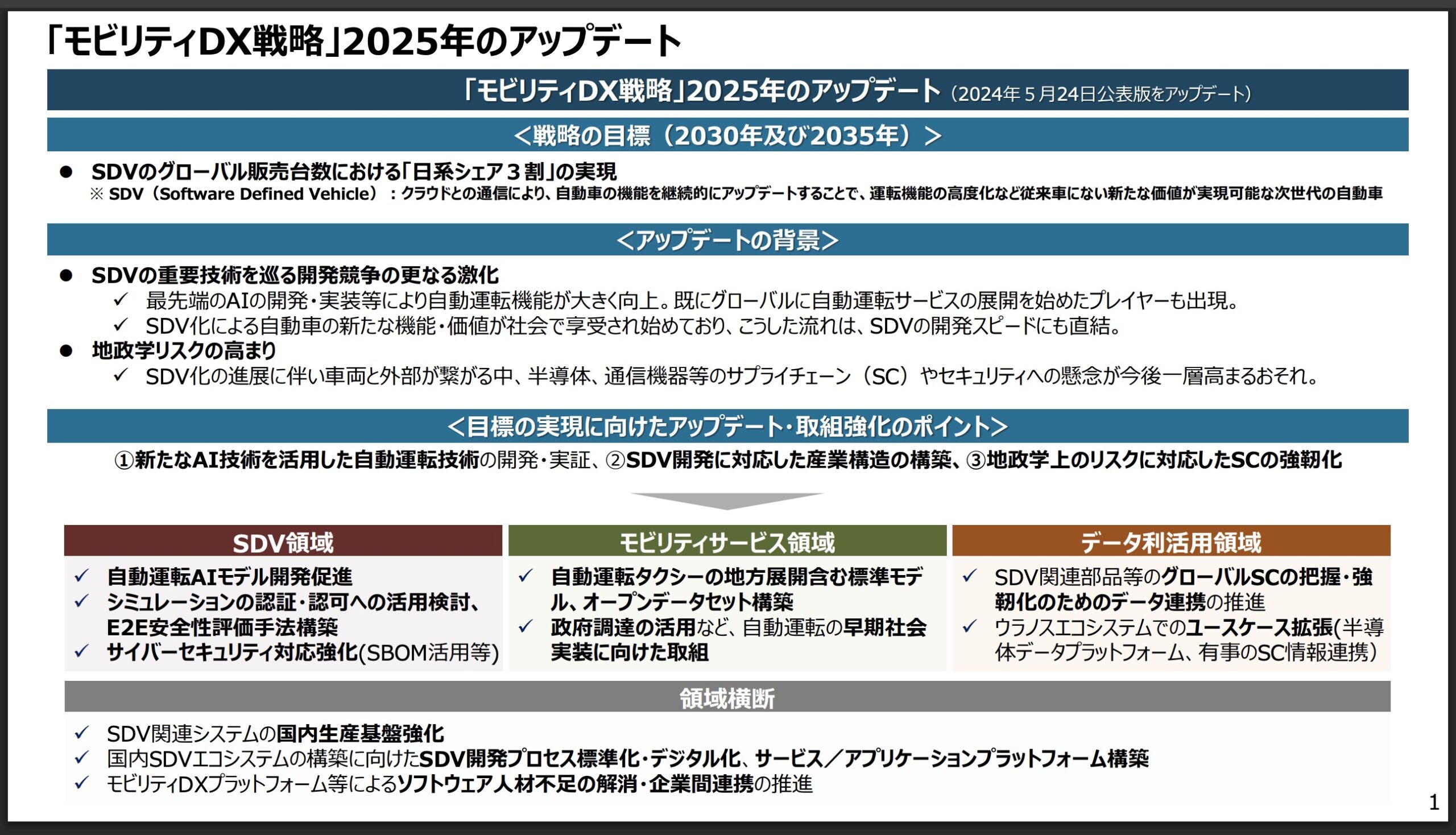
2024年に米テスラがE2EモデルのAI実装を開始したように最先端のAI開発・実装が進んでおり、走行データによる学習をもとに現実世界の物理法則や物体間の相互作用等複雑な状況を理解しリアルな運転シーンを生成する「世界モデル」など、自動運転やADAS、シミュレーション環境構築の技術競争力を左右するAI領域での競争が激化していることを受け、E2Eの研究開発に本格着手することとなったようだ。
政府が講ずる施策としては、①新たなAI技術を活用した自動運転技術の開発・実証②SDV開発に対応した産業構造の構築③地政学上のリスクに対応したSCの強靭化――が挙げられている。
①では、安全かつ広範囲な自動運転実装に向けたAI技術開発・業界協調での体制構築を進めるほか、自動運転の早期社会実装に向けた取り組みを推進していく。政府調達の活用などが一例だ。
②では、SDV関連部品などのグローバルSCの把握・強靭化のためのデータ連携の推進や、SDV化に対応した車両の要件定義の共通ルール化・開発プロセスのデジタル化推進、モビリティDXプラットフォームなどによるソフトウェア人材不足の解消・企業間連携の推進を図っていく。
③では、SDV関連システムの国内生産基盤を強化していく方針だ。
ブラックボックス化の解決は世界共通の課題
現状、自動運転車の安全性に関する基準はルールベースに基づいており、ルールベースやE2Eの区別なくどのような制御手法であっても満たすべき要件は同一となる。米中でも安全性のリスクは大きな課題とされており、グローバルに市場を獲得する上では、基準に適合する安全性の確保と技術開発の両立が重要となる。
今後、SDVの付加価値として重要性を増す自動運転領域において、AIモデル開発やデータを海外企業に依存することは、スマートフォンなどと同じ負けパターンに陥る可能性も懸念される。
これらを踏まえると、先行する米中でも課題が残る今、日本として自動運転におけるAI技術の構築と安全性の確保を両立し、差別化することができれば、勝負の余地はあるとしている。足下、日本は一部を除きルールベースでの開発が中心となっているが、国際競争に打ち勝つには、まず国内での乗用車の自動運転の実績を早急に積み上げる必要がある。
したがって、オールジャパンでの協調体制の検討、協調領域の具体化を進め、技術開発や業界協調でのルール形成などスピード感をもって後押しし、乗用車を含む高度な自動運転を日本市場で実装していくとともに、その成果を自動運転の普及が見込まれる海外市場へ展開していくという。
■E2Eとルールベース
これまでの自動運転システムはルールベースが主流
これまでに世界で実用化されたレベル4相当の自動運転システムは、基本的にルールベースに基づいて開発されたものだ。
交通環境やルール、それに合わせた制御方法など事細かにプログラムし、自律走行を実現する仕組みだ。道路上で起きうる事象は実質無限であり、プログラムによってすべての事象に対応するのはほぼ困難であるため、走行するエリアやルートを区切り、車速などの条件を設定することで完成度を高めていく。
多くの場合、高精度3次元地図やLiDARやカメラ、ミリ波レーダーなど複数のセンサーを使用するなどし、安全性を高めている。
交通ルールや注意点など、膨大なプログラムを一つひとつ学習させなければならないため、開発サイドの負担は非常に大きい。一方、自律走行可能な条件を付しているため、安全性・確実性を確実に高めることができる。
E2Eはレベル5への道を切り拓く
一方、E2EのAIベースの自動運転モデルは、車載センサーで認識したデータをもとにAIが直接判断を下し、車両を制御する。ルールベースでは一つひとつ教えられていた交通ルールなどを、走行経験をもとに自ら学習していくイメージだ。
正しい判断をした場合は加点、あるいは間違った判断をした場合に減点するなど報酬を付与する。その報酬を最大化するようAIが試行錯誤することで、次第に正しい判断を身に着けていく。
無限とも言えるシチュエーションを試行錯誤しながら学ぶため、自動運転能力が一定水準に達するまでは相当な時間を要するが、限定条件のないレベル5相当の自律走行を可能にする点が大きなポイントだ。初めて遭遇する場面でも、類似したシチュエーションをもとに類推するなどし、対処することができる。
欠点は、AIの判断がブラックボックス化してしまう点だ。人間が付与したルールに基づいているわけではないため、誤った判断の結果事故を起こした場合、AIが何を根拠にその判断を下したのか説明できないのだ。この課題に対し、今回の委託事業の「安全性の評価方法の確立」でどのような成果が出されるのか、要注目だ。
なお、E2Eモデルには、認識や経路判断それぞれを別のAIモデルで処理する手法=モジュール型と、認識から制御まで単一のAIモデルで処理する手法=モノリシック型がある。モノリシック型で、LiDARを使わずカメラ主体のセンシングで自動運転実現を目指すE2E開発が目立つ。
【参考】関連記事「自動運転モデル「ルールベース」「E2Eモデル」とは?」も参照。
■【まとめ】内製化の意義は非常に大きい
Waymoに代表されるルールベースの自動運転では、日本は米国・中国に相当遅れをとっており、挽回は容易ではない。一方、E2EはまだADASレベルの実装に留まっているため、技術面では挽回の余地は確かにあると言える。開発競争に勝てずとも、米中政府の動向を踏まえると内製化を図る意義も非常に大きなものとなりそうだ。
一方、技術の実装をどのように推進していくのか……という見方も重要ではないだろうか。例えば、開発をリードするだろうスタートアップの技術を国内自動車メーカーなどがADAS技術として採用すれば、スタートアップは収益を確保しながらより大量のデータを得ることができる。
戦略や技術面などでそりが合わないのかもしれないが、国内の有力スタートアップと自動車メーカーが本気で結びつくような流れができれば、自動運転分野における「日本」の存在感を一気に増すことができるのではないだろうか。こうした動向にも期待したいところだ。
【参考】関連記事としては「【最新版】自動運転、日本政府の実現目標・ロードマップ一覧|実用化の現状解説」も参照。


の自動車保険を比較!")



の自動車保険を比較!")
の意味・定義・読み方は?自動車業界の新潮流を示す")
ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

