


レベル3の市販化やレベル4の実用化など、徐々に身近な存在となり始めている自動運転。自動運転技術を搭載したマイカーを手にしたり、自動運転サービスを受けたりする日もそう遠くない将来訪れることになりそうだ。
遠い未来の将来技術ではなく現実的な技術となった自動運転だが、自動運転車が走行するための要件にはどのようなものがあるのか。国土交通省が策定した安全技術ガイドラインをもとに、自動運転システムの作動要件や構成要件などについて解説していく。
▼自動運転車の安全技術ガイドライン
https://www.mlit.go.jp/common/001253665.pdf
記事の目次
■国土交通省策定の安全技術ガイドラインの概要
ODDの設定など全10項目を提示
国土交通省が2018年に策定・発表した「安全技術ガイドライン」では、自動運転車の安全性に関する要件として、以下10項目を示している。
- ①運行設計領域(ODD)の設定
- ②自動運転システムの安全性
- ③保安基準等の遵守等
- ④ヒューマン・マシン・インターフェース(HMI/ドライバー状態の監視機能等の搭載)
- ⑤データ記録装置の搭載
- ⑥サイバーセキュリティ
- ⑦無人自動運転移動サービス用車両の安全性
- ⑧安全性評価
- ⑨使用過程における安全確保
- ⑩自動運転車の使用者への情報提供
自動運転車の安全性を確保するための要件だが、自動運転車にとって安全性の確保は必要不可欠であることから、これらは自動運転を成立させるための要件そのものと言える。
①~⑩の各項目は開発サイドが留意すべきポイントだが、①のODDは、第三者から見た際の自動運転システムの作動要件を明確に示すものでもあり、今後目にする機会が増えそうだ。
自動運転システムが作動可能な条件を示すODD
① のODDは、自動運転システムが作動する条件を指す。自動運転を成立させる最も分かりやすい条件だ。各社が開発する個々の自動運転システムが有する性能や使用方法などに応じ、道路条件、地理条件、環境条件、その他の条件についてそれぞれ設定する。
道路条件は、高速道路や一般道の区別、車線数、車線の有無といった道路そのものの走行条件を指す。地理条件は、都市部や郊外、山間部など交通状況・環境が異なるエリア別に条件を設定する。一定範囲を任意で仮想線引き(ジオフェンス)し、細かく走行エリアを設定するケースもある。
環境条件は、降雨や降雪などの天候や、日中・夜間の区別などについて設定する。その他の条件は、走行時の上限速度やインフラ協調システムの有無、保安要員の有無などについて設定する。
例えば、「荒天時以外の日中、郊外の高精度3次元地図が整備された道路で時速40キロ以内で走行する」――といった具合に、自動運転システムの性能などに応じて各開発者が設定する。
最高時速40キロより80キロなど、ODDの対象が広ければ広いほどその自動運転システムは高性能と言える。使用目的に応じて意図的に制限する場合もあるが、一般的にODDは自動運転システムの能力値を示す。
【参考】ODDについては「自動運転とODD(2022年最新版)」も参照。
自動運転とODD(2022年最新版) https://t.co/jo8zyWasLH @jidountenlab #自動運転 #ODD
— 自動運転ラボ (@jidountenlab) May 16, 2022
TORやMRMなどを設定
②の自動運転システムの安全性は、自動運転システムの設計において、法令順守や制御系・センサー系の冗長性確保など、安全性確保に向け盛り込まなければならない要件を示している。
自動運転システムは、現在の状況がODD内にあるかどうかを確実に認識し、ODD内においてのみ作動することや、その作動は運転者(運行管理者)の意思によって行うことができることなどが定められている。
レベル3においては、自動運転の継続が困難であると判断した際にテイクオーバーリクエスト(TOR/運転権限の委譲)を行うことや、引き継がれるまでの間フォールバック(縮退運転)を行うこと、運転者に運転が引き継がれたか否かを判別することができること、引き継がれない場合に車両を自動で安全に停止させるミニマル・リスク・マヌーバー(MRM)を設定することが盛り込まれている。
また、レベル4においても、ODD外となった際や何らかの障害が発生した際など、自動運転の継続が困難と判断した際にMRMを設定することが求められている。
【参考】関連記事としては「自動運転における「ミニマム・リスク・マヌーバー(MRM)」とは?」も参照。
自動運転における「ミニマル・リスク・マヌーバー(MRM)」とは? https://t.co/WH93LhVrm0 @jidountenlab #自動運転 #MRM #停車
— 自動運転ラボ (@jidountenlab) February 3, 2020
コンピュータと人間の情報伝達手段が必須に
④のHMIは、システムの作動状況を運転者や乗員に知らせるためコンピュータと人間の意思疎通・情報伝達手段を備えることが必要としている。特に手動運転が混在するレベル3は、運転手が居眠りしていないかなど状態を監視し、必要に応じて警報を発するドライバーモニタリングシステムなどの機能を有するHMIが必要だ。
レベル4は、自動運転システムの作動状況を運転者などが確実に認知できる機能をはじめ、自動運転が継続困難となる際、あらかじめ運転者などに知らせることができる機能が必要としている。
⑤のデータ記録装置は、システムの作動状況や運転者の状況などをデータとして記録する装置で、事故発生時などの状況把握に必要不可欠となる。
2020年施行の改正道路運送車両法において、自動運行装置とともに作動状態記録装置が保安基準対象装置に盛り込まれている。
なお、一般乗用車においても、国際連合欧州経済委員会自動車基準調和世界フォーラム(WP29)で「事故情報計測・記録装置に係る国連規則」が採択されたことを受け、2021年9月に事故情報計測・記録装置(EDR)の装備義務化がスタートした。新型車は2022年7月から適用されている。
車内制御系ネットワークが車外からの影響を受けないシステムが必須に
⑥のサイバーセキュリティは、無線通信の使用が前提となる自動運転車に必須の技術となる。自動運転車は、リアルタイムの交通情報やV2I(路車間通信)、V2V(車車間通信)、サーバーとのデータ送受信、OTAアップデートなど、さまざまな面で通信を行う。
このため、WP29などの最新の要件を踏まえ、車外ネットワークから車内制御系ネットワークが影響を受けないことや、システム機能不全時に向けたセーフモードを備えること、不正操作を検知した際に運転者に警告するとともに車両を安全にコントロールすることなどが求められている。
また、⑨の使用過程における安全確保においても、保守管理やサイバーセキュリティ確保に向け随時ソフトウェアのアップデートなどの措置を講じることが必要としている。
【参考】サイバーセキュリティについては「総務相、自動運転レベル4以上の普及で「サイバーセキュリティの確保が非常に重要」」も参照。
総務相、自動運転レベル4以上の普及で「サイバーセキュリティの確保が非常に重要」 https://t.co/NmMrN9y32y @jidountenlab #自動運転 #セキュリティ #大臣
— 自動運転ラボ (@jidountenlab) September 14, 2020
自動運転に関する正しい知識を提供
⑩の自動運転車の使用者への情報提供は、今後重要性が増す領域だ。自動運転車の安全確保には、使用者が各車の機能限界時の挙動や運転者の義務などについて理解することが必要不可欠となる。
このため、システム開発者などは自動運転車の使用者に対し、システムの作動条件やODDの範囲、機能限界、運転者のタスク、可能となる運転以外の行為(セカンダリアクティビティ)、HMIの表示に係る情報、システムに異常が発生した際の車両の挙動、使用過程の自動運転車の保守管理などについて周知することとしている。
海外では、自動運転ではないレベル2ADAS(先進運転支援システム)の誤用・誤認識による事故がたびたび発生している。こうした事故は今後、自動運転が可能なレベル3でも発生する可能性があり、自動運転に対する正しい理解の周知が急務となりそうだ。
【参考】レベル2誤用による事故については「死亡事故続く「中国版テスラ」 NIOの車は「自動運転」できない」も参照。
■ホンダ「トラフィックジャムパイロット」の事例

ここでは、ホンダ「レジェンド」に搭載されているレベル3システム「トラフィックジャムパイロット」を例に自動運転システムの作動要件を見ていく。
▼Honda SENSING Elite|新機能詳細|トラフィックジャムパイロット(渋滞運転機能)/緊急時停車支援機能
https://www.honda.co.jp/factbook/auto/LEGEND/202103/P07.pdf
▼トラフィックジャムパイロット(渋滞運転機能) エンジニアトーク|Honda
https://www.honda.co.jp/tech/articles/auto/EngineerTalk_TJP/
トラフィックジャムパイロットは、高速道路渋滞時において最大時速50キロ以下の範囲で自動運転を可能としている。
同機能は、ハンズオフ機能付車線内運転支援機能が作動中、車速が時速30キロ以下の渋滞状態となり、前後に車両がいる際に作動する。渋滞が解消し、車速が上がって時速50キロ以上になるとTORが発せられる。
道路条件・地理条件は、高速と都市高速及びそれに接続される自動車専用道路で、対向車線と中央分離帯などで構造的に分離されていない区間や急カーブ、サービスエリア・パーキングエリア、料金所などは除外される。
環境条件では、強い雨や降雪による悪天候をはじめ、視界が著しく悪い濃霧や強い逆光などによってセンサー類が周辺車両や走路を認識できない状況にないことと、渋滞または渋滞に近い混雑状況であり、前走車と後続車が自車線中心付近を走行していることを挙げている。
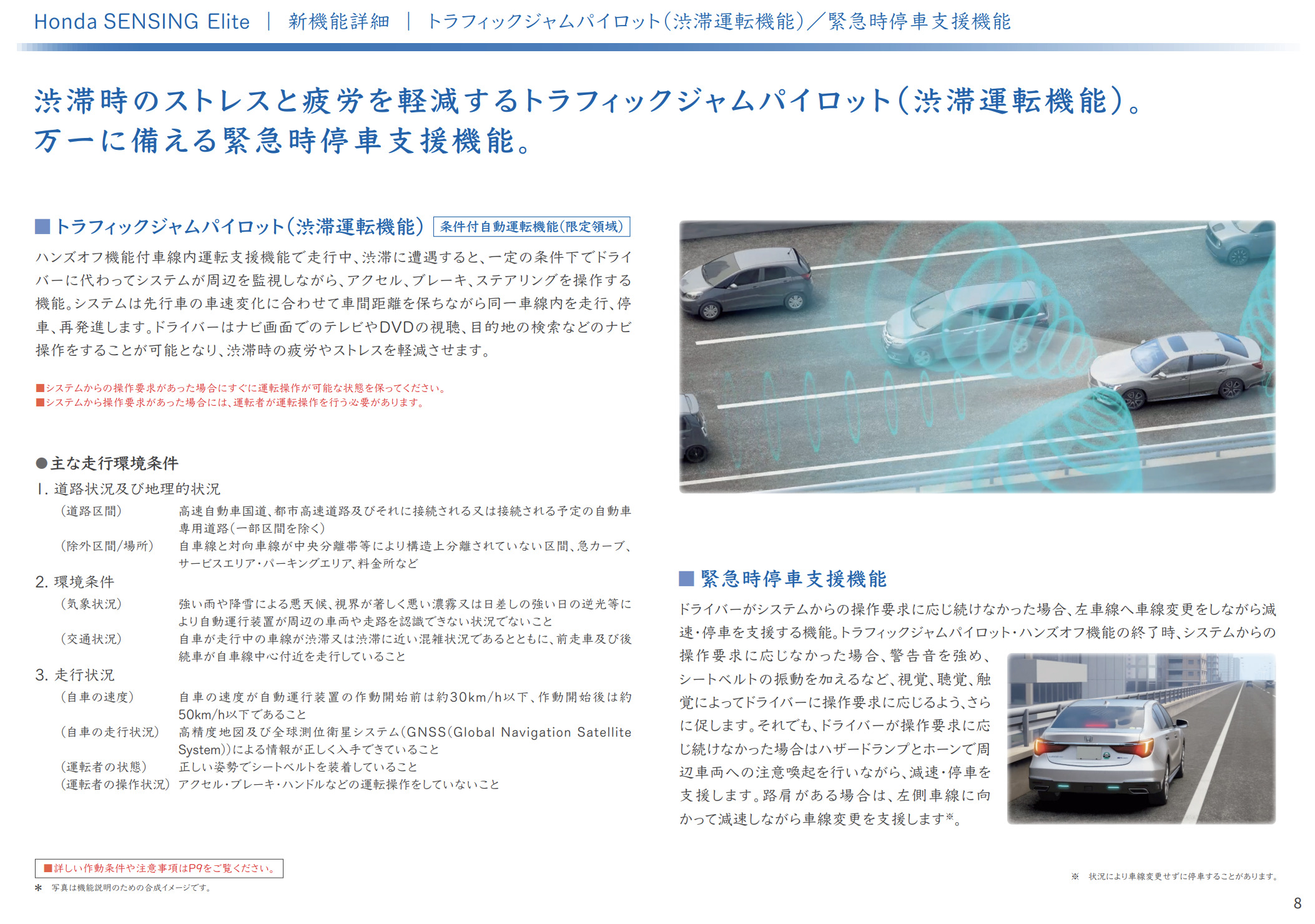
その他、自車速度が自動運行装置の作動開始前に時速30キロ未満、作動開始後は時速50キロ以下であることや、高精度地図や全球測位衛星システム(GNSS)による位置情報が正しく入手できていること、運転者が正しい姿勢でシーベルトを装着していること、運転者がアクセル・ブレーキ・ハンドルなどの運転操作をしていないことを挙げている。これらがホンダのトラフィックジャムパイロットにおける現在のODDとなる。
TORに運転者が応じなかった際は、視覚、聴覚、触覚による警告に続き、ハザードランプとホーンで周囲に注意喚起しながら減速・停車を支援する。路肩がある場合は、左側車線に向かって減速しながら車線変更を支援する。
その他、保安基準に則り不正アクセスを防止するサイバーセキュリティ対策や作動状態記録装置の搭載、メインECUのソフトウェア更新を的確に行うOTAアップデート、自動運行装置搭載車であることを示す外向け表示などの対応が行われている。
自動運転に関するこうした要件は、OTAアップデートで拡張される可能性がある。一度製品化されたら終わり――という類ではなく、常に進化の可能性を含んでいる点を忘れてはならない。
【参考】ホンダのトラフィックジャムパイロットについては「ホンダの自動運転戦略(2022年最新版) レベル3市販車「新型レジェンド」発売」も参照。
ホンダの自動運転戦略(2022年最新版) レベル3市販車「新型レジェンド」発売 https://t.co/A5epbw13PK @jidountenlab #ホンダ #自動運転 #まとめ
— 自動運転ラボ (@jidountenlab) March 19, 2022
■【まとめ】各種要件も実用化とともにアップデート
自動運転システムの作動要件としてはODDが明確だが、自動運転システムにセキュリティ要件やHMI、TORやMRMなどの技術、データ記録装置などが一体となることで初めて公道を走行可能な自動運転車となる。
国交省のガイドラインが示す各種要件も、実用化の進展とともにアップデートされ、さらに具体的かつ実用的な要件へと書き換えられていくものと思われる。進化し続ける自動運転技術の動向に引き続き注目だ。
【参考】関連記事としては「自動運転システムの役割・仕組みまとめ」も参照。







の意味・読み方は?自動車業界の新潮流を示す")
ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

