

移動サービスを中心に無人化を実現する自動運転レベル4技術の実用化が始まっているが、この波は物流分野にもしっかりと押し寄せている。ラストマイルでは自動走行ロボットの公道実証が始まり、ファースト~ミドルマイルでは、高速道路における後続車無人のトラック隊列走行技術の開発が進められている。
隊列走行技術には、電子けん引技術を活用した後続車有人システムと後続車無人システム、そしてレベル4技術を活用したシステムが研究されており、順に社会実装が始まる見込みだ。
レベル4による隊列走行は、一般車両におけるレベル4とは異なる課題を有する。この記事では、国土交通省所管のASV推進検討会が取りまとめた課題・留意事項を参考に、レベル4技術による隊列走行が抱える課題に迫っていく。
記事の目次
■高速道路でのトラックの隊列走行で留意すべき事項
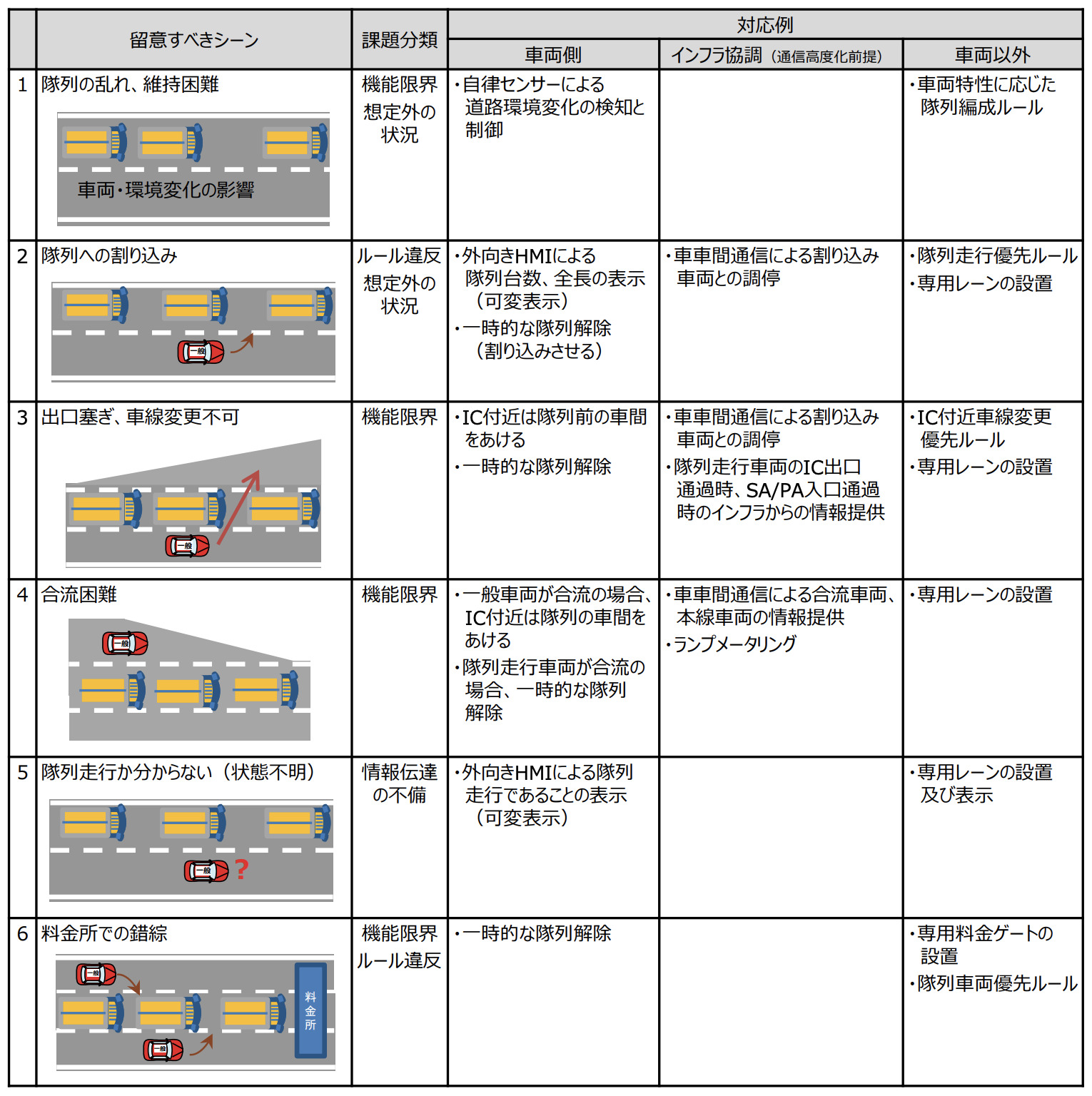
ASV推進検討会が取りまとめた第6期ASV推進計画報告書によると、高速道路におけるレベル4以降のトラック隊列走行においては以下6点の課題が挙げられている。
- ①隊列の乱れ、維持困難
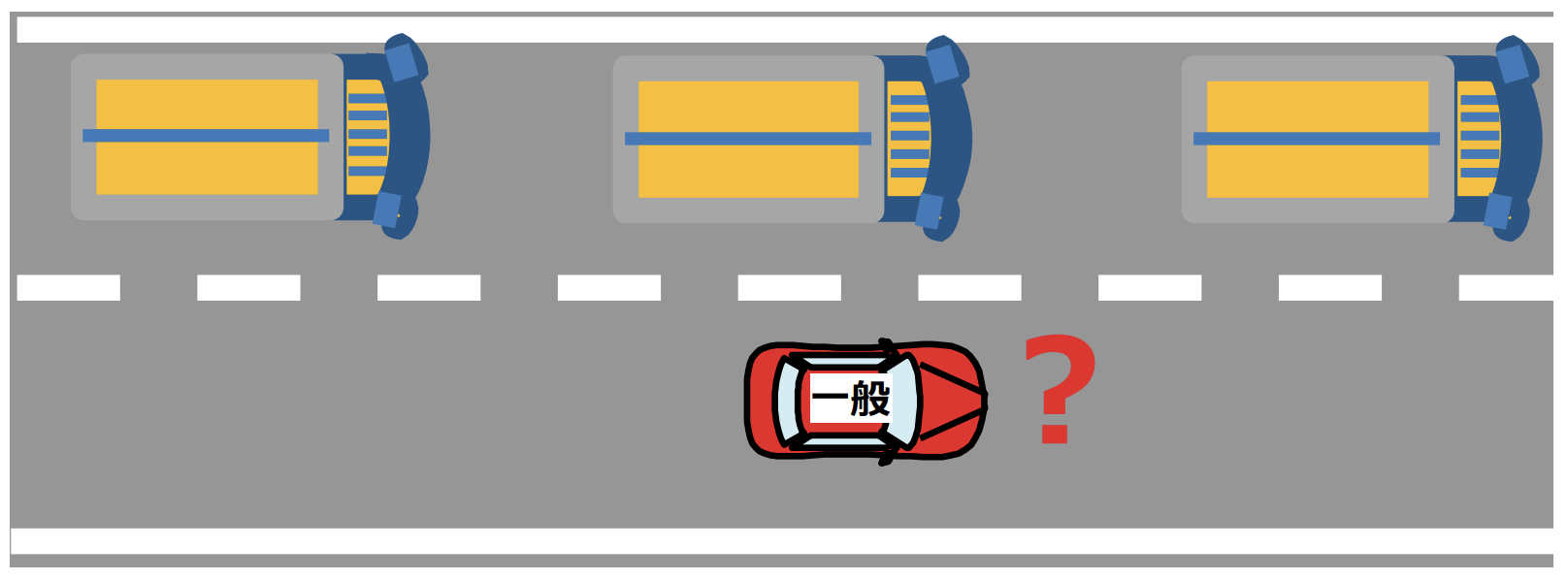
- ②隊列への割り込み
- ③隊列走行車両により高速道路出口を塞ぐ
- ④隊列走行により合流地点での合流が困難
- ⑤隊列走行の状態不明
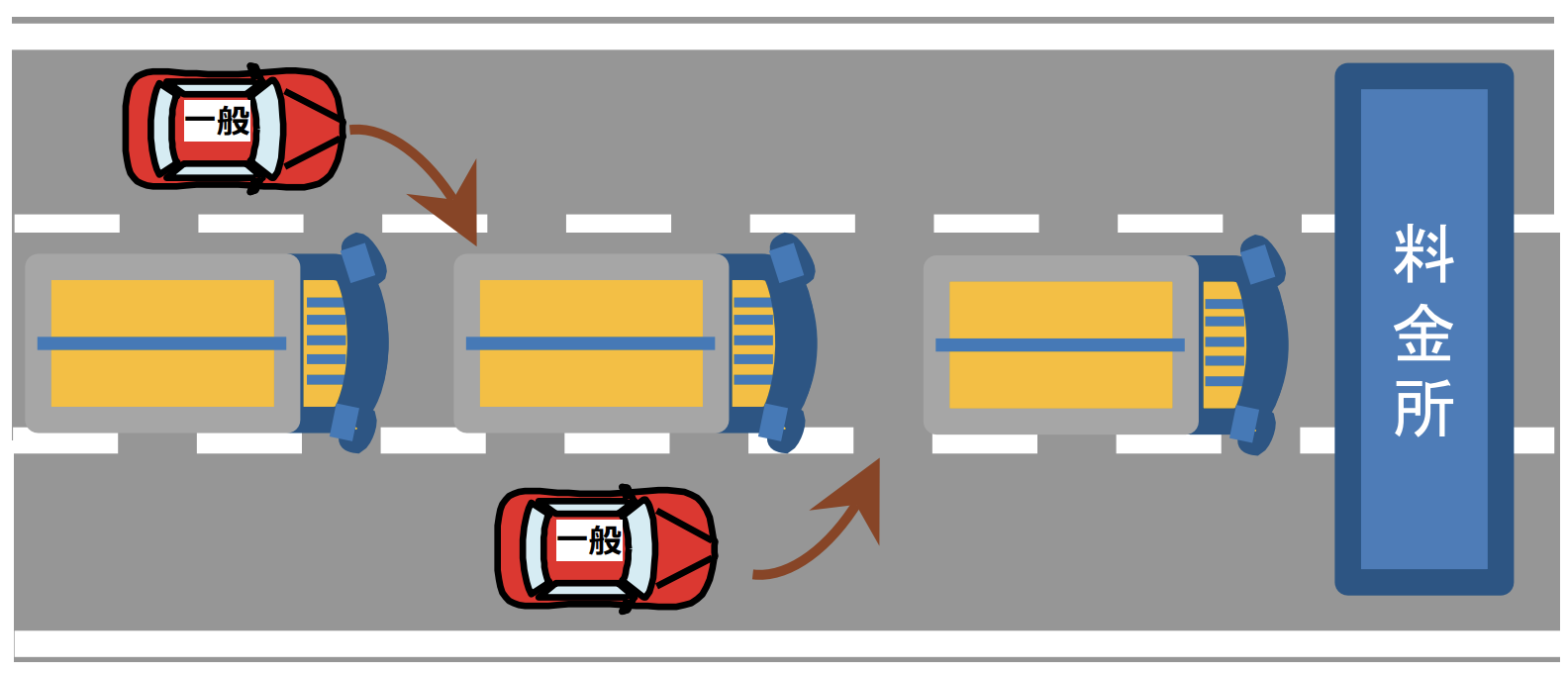
- ⑥隊列走行に割り込みできず料金所で錯綜
①「隊列の乱れ、維持困難」
①「隊列の乱れ、維持困難」は、車両や環境の変化などによって隊列に乱れが生じ、適切な車間距離の維持などが困難になるケースだ。原因としては、自動運転システムの機能限界や想定外の状況などが挙げられている。
こうした際の対応例としては、自律センサーによる道路環境変化の検知と制御を高度化することや、車両特性に応じた隊列編成ルールを策定することなどが求められる。
②「隊列への割り込み」
②「隊列への割り込み」は、隊列の間に一般車両が割り込むことで、隊列の維持に支障をきたすケースが考えられる。原因には、隊列走行に関するルール違反や想定外の状況などが挙げられている。
対応例としては、外向きHMI(ヒューマン・マシン・インタフェース)によって隊列台数や全長などを表示し、周囲の車両に周知・注意喚起する方法や、割り込みを認め一時的に隊列を解除する方法、車車間通信(V2V)による割り込み車両との調停、隊列走行優先ルールの策定や専用レーンの設置などを挙げている。
③ 「隊列走行車両により高速道路出口を塞ぐ」
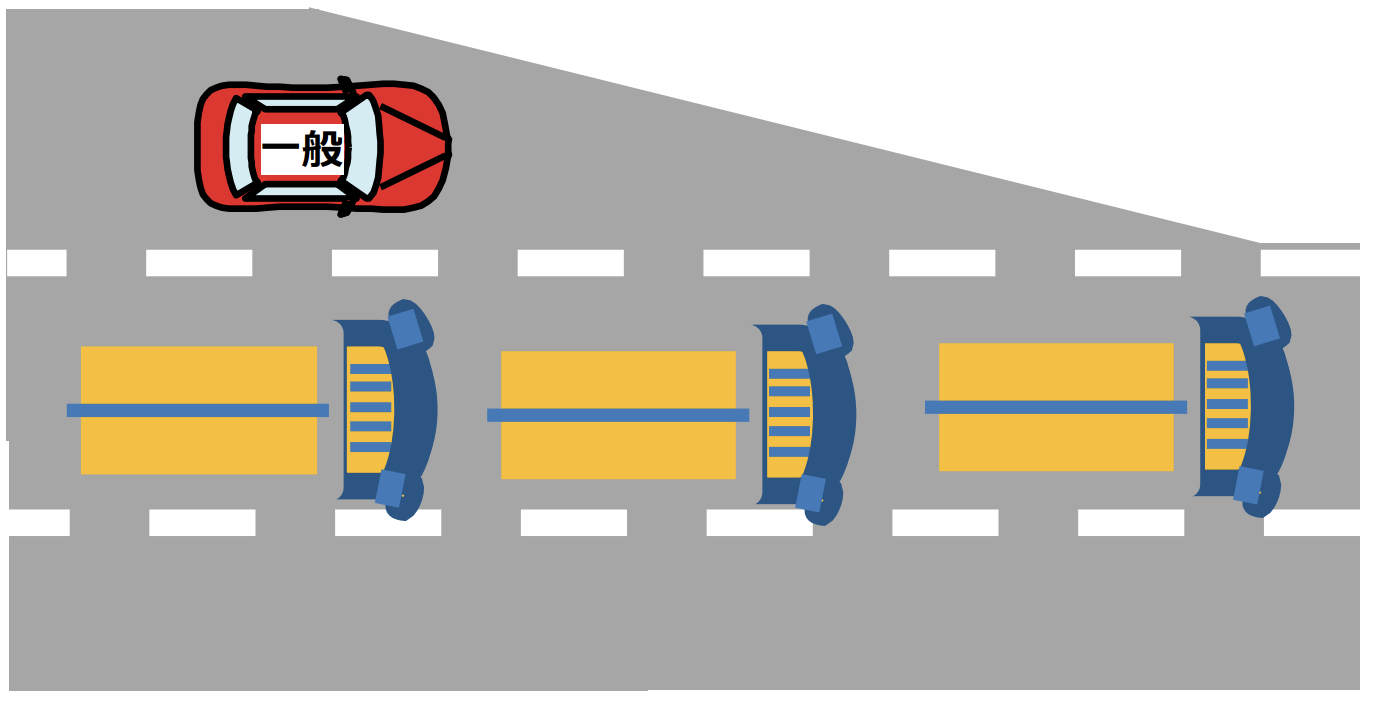
③ 「隊列走行車両により高速道路出口を塞ぐ」では、長い隊列走行の車列が他の車両の車線変更を妨げ、インターチェンジ出口やサービスエリア・パーキングエリア入口への進路をふさぐことが懸念されている。
対応例としては、インターチェンジ付近は隊列前の車間を空けることや一時的な隊列の解除、車車間通信による割り込み車両との調停、隊列走行車両がインターチェンジ出口やサービスエリア・パーキングエリア入口を通過する際にインフラから情報提供を行う方法、インターチェンジ付近の車線変更優先ルールの策定、専用レーンの設置などを挙げている。
④「隊列走行により合流地点での合流が困難」
④「隊列走行により合流地点での合流が困難」では、③と同様、インターチェンジ入り口などから他の車両が合流する際、隊列走行の車列が進路をふさぐことを課題に挙げている。
対応例としては、一般車両が合流する際、インターチェンジ付近で隊列の車間を空けることや、隊列走行車両が合流する際は一時的に隊列を解除すること、車車間通信による合流車両・本線車両の情報提供、合流車両の量を調整するランプメータリングの導入、専用レーンの設置などを挙げている。
⑤ 「隊列走行の状態不明」
⑤ 「隊列走行の状態不明」は、情報伝達の不備などにより、車列が隊列走行をしているかどうかが外部からわからない状況を指す。隊列走行が周囲の車両に認識されていなければ、強引な割込みなどトラブル発生の原因となる。
対応例としては、外向きHMIによる隊列走行であることの表示や、専用レーンの設置・表示を挙げている。
⑥「隊列走行に割り込みできず料金所で錯綜」
⑥「隊列走行に割り込みできず料金所で錯綜」では、隊列走行の車列が料金所を通過する際、同様に料金所へ向かう他の車両と入り混じることを懸念している。
対応例としては、一時的な隊列解除や専用料金ゲートの設置、隊列車両優先ルールの策定などを挙げている。
■レベル4隊列走行と電子けん引隊列走行の違い
上記の課題はあくまでレベル4システムによるトラックの隊列走行であり、現在精力的に開発が進められている電子けん引システムを活用した隊列走行とは異なる仕組みとなる。
電子けん引システムは、隊列を形成する各車両が綿密に車車間通信を行う。先頭車両のアクセルやブレーキ、ステアリング制御などの情報をリアルタイムで後続車両に伝達し、後続車両も連動する形でほぼ同時に制御を行う。このため、精度の高い隊列走行が可能で、各車両の車間距離も短めに設定することが可能になる。
一方、レベル4システムによる隊列走行は、一定程度隊列間で車車間通信を行うものの、電子けん引システムほど厳密に制御を統一せず、純粋なレベル4システムの能力を生かしながら隊列を形成するものと思われる。電子けん引に比べ必要とする車間距離は伸びるが、一時的に隊列を解除するなど柔軟に運行することができそうだ。
■隊列走行技術の進捗状況
国内における隊列走行技術の開発は、エネルギーITS推進プロジェクトとして2008年度に始まっている。2010年度に大型トラック3台で時速80キロ、車間距離15メートルの隊列走行実験、2012年度には車間距離4メートルの実証実験に成功している。特別なインフラ設備を必要とせず、協調型車間距離維持支援システム(CACC)や車線維持支援システム(LKAS)を軸とした自動運転システム主体で実現しており、現在開発を進めている隊列走行技術の基礎となっている。
その後、2015年度に設置された自動走行ビジネス検討会の中でトラックの隊列走行実現に向けた具体的な検討が始まり、2016年度から民間委託のもと実証事業がスタートした。
2017年に閣議決定された「未来投資戦略 2017」の中では、「高速道路における後続車無人のトラック隊列走行を新東名高速道路で2020年に実現し、2022年度以降に商業化」を目指す目標が掲げられ、実用化に向けた取り組みはいっそう加速している。
後続車有人システムの実証では、2018年1月に実施した新東名高速での15キロ×13回の実証走行中2回の割り込み、北関東自動車道での50キロ×12回の実証走行中20回の割り込みがそれぞれ発生したほか、低速車が隊列走行を追い越す際に渋滞が発生するなど、課題が浮き彫りとなったようだ。
後続車無人システムの実証は2019年1月以降にスタートし、同年6月には新東名の浜松いなさICから長泉沼津IC間約140キロのルートで、2~3台の後続車無人システム(セーフティドライバー同乗)で時速70~80キロ、車間距離10~20メートルの車群を組む実証を開始している。
2020年3月には、研究開発事業を受託している豊田通商がテストコースで実際に後続車を無人にした状態での隊列走行を実施し、以下の各機能を新たに追加し、走行している。
- 先頭車による後続車の一体操作機能と状態監視機能
- 車両制御装置の冗長化
- 先頭車ドライバー運転支援機能
- 隊列車間への車両割り込み抑止用LED表示器
- 隊列走行状態における異常発生への対応
2021年2月には、浜松いなさIC~長泉沼津IC間で3台の大型トラックが時速80キロ、車間距離約9メートルで隊列走行する実証に成功している。
【参考】関連記事としては「トラックの後続車無人隊列走行、新東名高速で実現!豊田通商が国の事業として実施」も参照。
最新の官民ITS構想ロードマップでは、2021年までに高速道路における後続車有人隊列走行、2022年度以降に後続車無人隊列走行、2025年度以降にレベル4自動運転をそれぞれ実現する目標を掲げている。
有人隊列走行については、いすゞ、日野、三菱ふそうトラック・バス、UDトラックスの大型4社がACCとLKASを組み合わせた技術で対応し、商品展開していくことを発表している。
トラックの後続車無人隊列走行、新東名高速で実現!豊田通商が国の事業として実施 https://t.co/yW6adUJiWp @jidountenlab #隊列走行 #トラック #豊田通商
— 自動運転ラボ (@jidountenlab) March 11, 2021
■【まとめ】電子けん引システムからレベル4へ着実に前進
高速道路におけるトラックのレベル4は、自家用車におけるレベル4の実現を待ってから実装される見込みだが、電子けん引システムを補助システムとする隊列走行に限定すれば、早期実現もあり得そうだ。
いずれにしろ、一定の法律改正やインフラ協調システム、優先・専用レーン設置の可否、運用ルールの策定、一般ドライバーへの周知など、クリアすべき課題は山積している。まずは電子けん引による後続車有人、後続車無人技術の社会実装など一歩ずつ着実に前進し、早期実現を目指したいところだ。
▼国土交通省「第6期先進安全自動車(ASV)推進計画成果報告について」
https://www.mlit.go.jp/jidosha/anzen/01asv/report06/
▼報告書本編:混在交通下に自動運転車を導入した際の影響及び留意点の検討
https://www.mlit.go.jp/jidosha/anzen/01asv/report06/file/hokokusyo_1_konzai.pdf
※自動運転ラボの資料解説記事は「タグ:資料解説|自動運転ラボ」でまとめて発信しています。
【参考】関連記事としては「自動運転の最高位「レベル5」、システムと人の役割分担の考え方」も参照。


とは?いつ実現?")




の意味・読み方は?自動車業界の新潮流を示す")
ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

