

国土交通省と経済産業省は2021年3月10日までに、新東名高速道路の一部区間で「後続車無人隊列走行」を2月22日に実現したことを発表した。
後続車無人隊列走行をしたのは、新東名高速道路の遠州森町パーキングエリアから浜松サービスエリアまでの約15キロの区間。3台の大型トラックが時速80キロ、車間距離約9メートルの車群を組んで走行した。後続車の助手席には保安要員を乗せた。
国交省などは、物流業界が直面しているトラック運転手の高齢化や人材不足などの課題解決に向け、2020年度内に高速道路におけるトラック後続車無人隊列走行技術を実現することを目標としてきた。
こうした中、「トラックの隊列走行の社会実装に向けた実証」と題したプロジェクトを豊田通商に委託し、これまで後続車無人隊列走行の技術開発のために実証実験を重ねてきた。今回の取り組みもこの実証プロジェクトの一環として豊田通商が行ったものだ。
政府が発表している成長戦略では、「2025年度以降の高速道路におけるレベル4自動運転トラックの実現を目指し、高性能トラックの運行管理システムについて検討を行う」ことが掲げられており、同省は今後も自動運転トラックの開発や社会実装を推進していく。
■後続車無人隊列走行を実現した技術は?
経済産業省は、今回の後続車無人隊列走行の実際の映像や技術についての説明をYouTube動画で配信している。
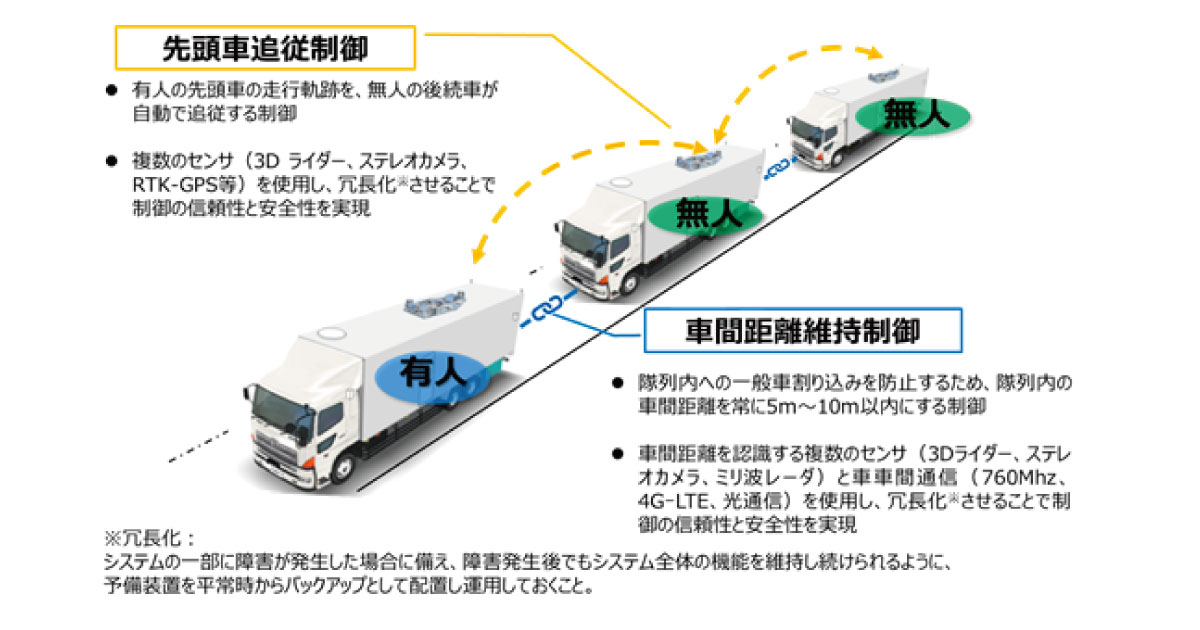
後続車無人隊列走行とは、先頭を走る有人のトラックに、無人のトラックを通信で連結させ、複数台のトラックを電子的に牽引することを指す。
今回の取り組みでは、先頭車の走行軌跡を後続車に自動で追従させることと、隊列する複数台の車両間に容易に他の車が入れないよう車間距離を10メートル以内に制御すること、という2点が重視されたという。
こうしたことを実現するのが、「先頭車トラッキング制御」「車間距離制御」「先頭車ドライバー運転支援」といった技術だ。例えば「先頭車トラッキング制御」では、先頭車を走行する軌跡を認識するため、3D-LiDARとステレオカメラなどを用いた。
「車間距離制御」でも3D-LiDARやステレオカメラを使いつつ、トラック同士を通信でつなぎ、先頭車のアクセルやブレーキの使用状況をただちに後続車両と共有し、車間距離をうまく制御することができたという。
■信頼性や安全性工場へ「MRMモード」などを用意
YouTube動画では、無人隊列走行についての信頼性と安全性を高める仕組みとして、装置故障への対応、割り込みの対応についても説明がされている。
装置の軽い故障の場合は、「縮退運転モード」で安全に速度50キロまで減速させる。多重故障の際には「MRMモード」となり、隊列走行が継続困難な場合に安全に車両を停止される技術を用いている。
【参考】MRMについては「自動運転における「ミニマム・リスク・マヌーバー(MRM)」とは?」も参照。
車両割り込みについては、停車中のトラック隊列内に人や車両が立ち入った場合には「割込危険」というLED表示で注意喚起を行い、先頭車のドライバーが発進できない仕組みとなっている。
また、走行中に車両割り込みが発生した場合にはMRMモードに切り替え、後続車はハザードランプを照らしながら安全に停車するという。
■【まとめ】2022年度以降の商業化に向けてさらに技術開発
政府が発表している「官民ITS構想・ロードマップ2020」によれば、高速道路でのトラックの後続車無人隊列走行の商業化は、2022年度以降に実現することが目指されている。
今後は雨天時や降雪時、夜間などさまざまな走行環境にも対応できるよう、さらに技術開発を進めていくという。技術の進化、そして今後の取り組みへの期待感が高まる。
【参考】関連記事としては「後続トラックは完全自動運転!米Locomationの隊列走行システム、NVIDIA製SoC搭載」も参照。







の意味・読み方は?自動車業界の新潮流を示す")
ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

