

自動運転技術の課題抽出や活用について検討を進めている「都市交通における自動運転技術の活用方策に関する検討会」はこのほど、基幹的バスにおける自動運転導入に関する検討の中間とりまとめ案を発表した。
同検討会の「基幹的なバス分科会」が取りまとめた報告書で、これまでに国内で行われた自動運転バス実証の成果をもとに課題を抽出し、短期・中長期に求められる動向・対策などを整理している。
この記事では、報告書の中身を1つずつ解説していく。
記事の目次
■基幹的なバス交通における自動運転技術活用の動向
自車の位置把握について
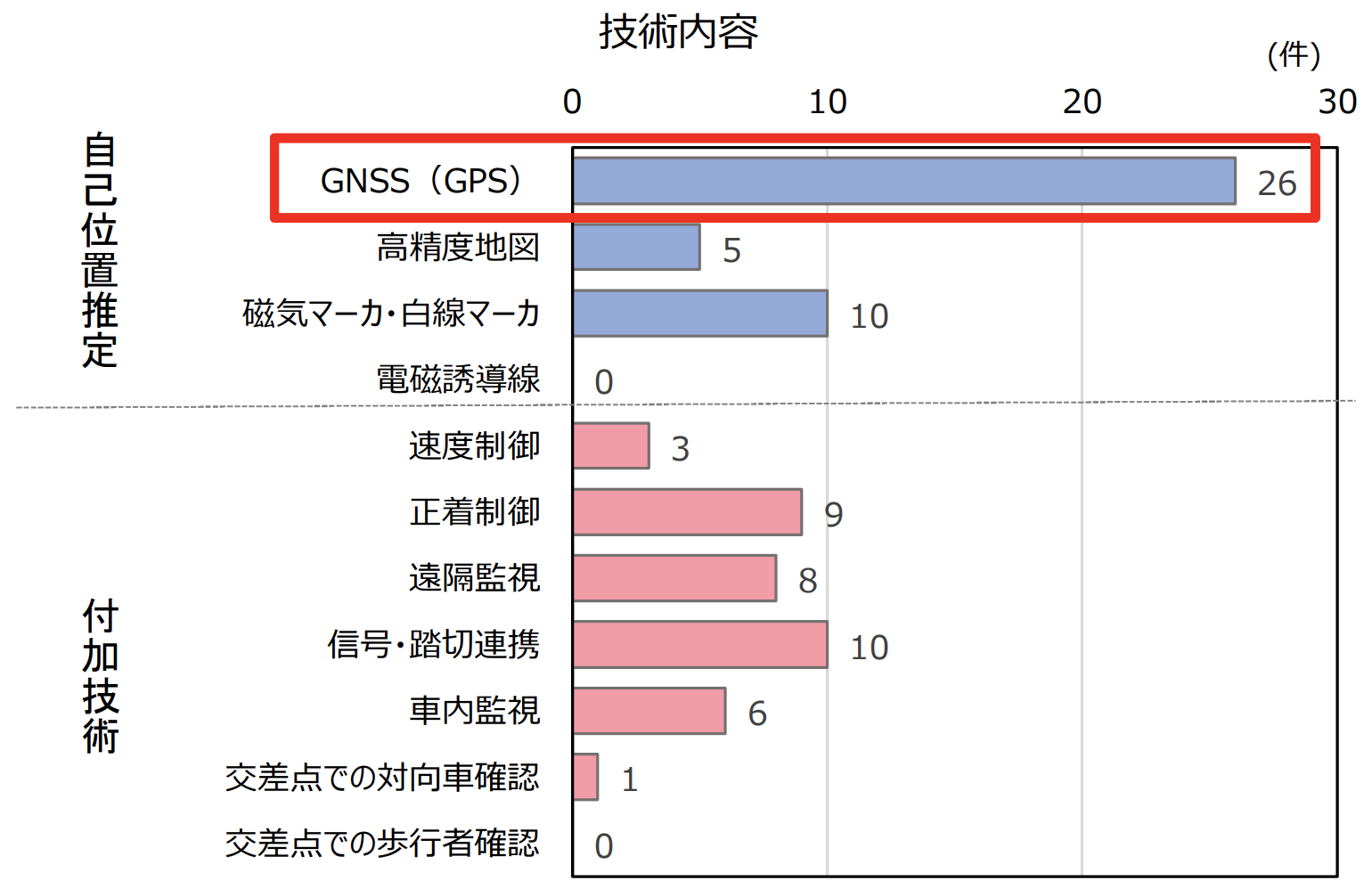
実証における自己位置推定技術では、GPSをはじめとしたGNSS(衛星測位システム)を用いた走行が26件と最も多く、磁気マーカ・白線マーカ10件、高精度地図5件と続いている。
重複回答の有無が不明のため詳細は不明だが、GNSSを主体に受信が低下した際などに磁気マーカや高精度地図で補完するパターンがスタンダードとなっているようだ。都市部などでは高層ビルや街路樹などの影響でGNSSが感度不良を起こす場合があり、そうした際に磁気マーカなどが活躍する。
磁気マーカは道路インフラ面での対応が必要なため、関係者との協議が必須となる。一方、高精度地図とセンサー類を用いた走行は、地図の整備や感度の高いセンサーの設置に費用がかかる状況で、短期的にはGNSSを主体に磁気マーカなどのインフラと連携することで精度を高め、中長期的には周辺状況に左右されにくい高精度地図の整備を進めていくことが望ましいとしている。
走行空間・単路部について
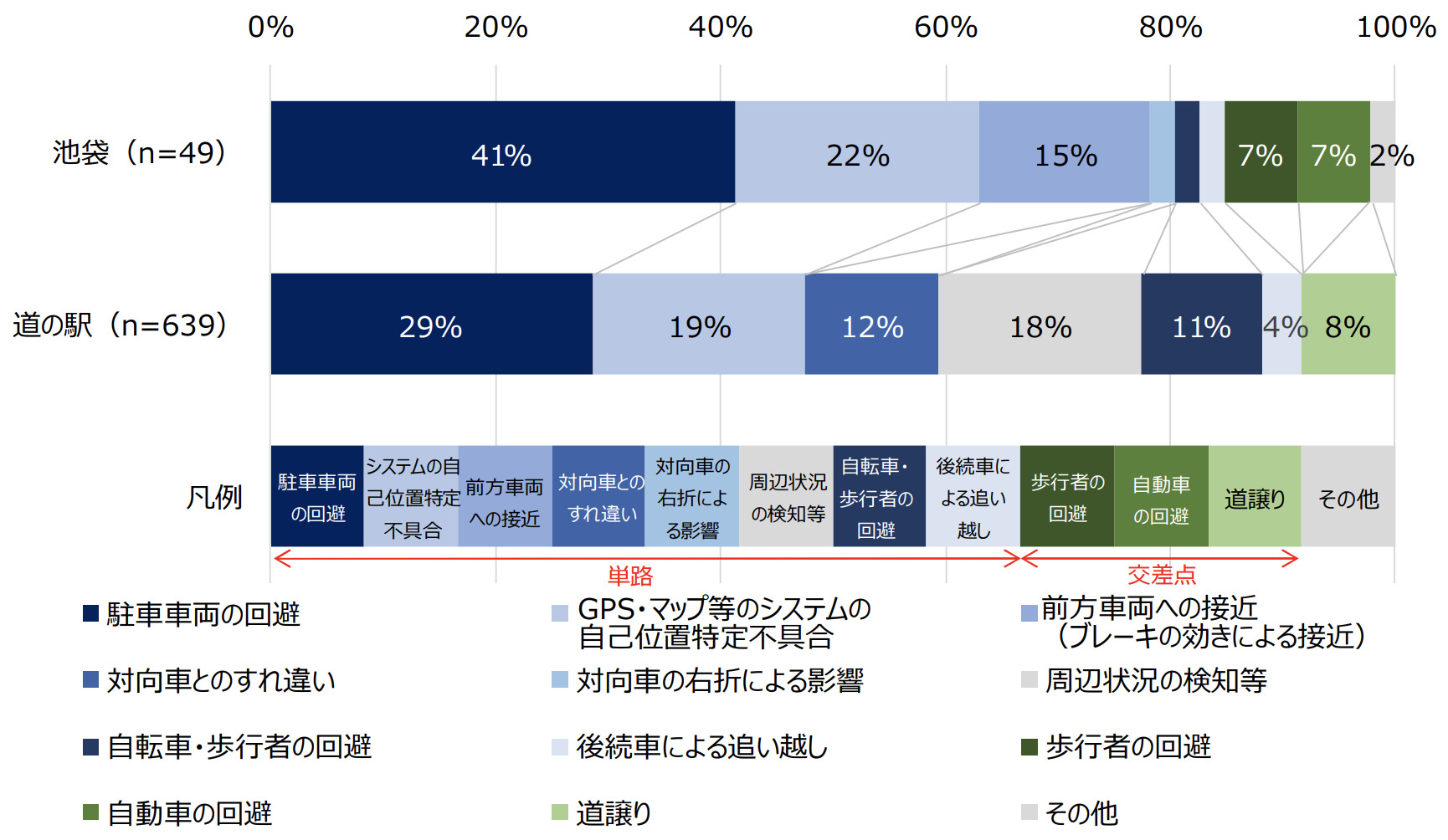
これまでの実証では、専用走行空間においては比較的スムーズに走行できる一方、交通量の多い混在空間では交通量や駐停車車両による影響が大きく、一定条件を満たした箇所以外での自律走行はまだ難しい状況という。
手動介入が多く見られた。手動介入要因としては、都市部では特に駐停車車両の回避が多く、道の駅など地方における実証では周辺状況の検知や自転車・歩行者の回避の割合が相対的に多かった。
活用にあたっては、短期的には専用空間で走行することが望ましく、混在空間であれば歩車分離され交通量が少ないなど限定的な空間での走行が想定される。
中長期的には、複数車線があり他の交通の影響を回避しやすい環境を整備しながら混在空間へ拡大していくことが望まれ、駐停車車両との走行空間の区分や、走行空間上に過度に駐停車を行わない仕組み、自動運転車の存在・走行を他の交通に明示する仕組みなどがあることが望ましいとしている。
走行空間・交差部について
交差部における通行時は、障害物検知などによる急ブレーキで車内事故が発生しないよう多くの事例で低速走行の設定を行っているという。その一方、極端に低速で交差点内通行をすると交通流を乱し、後続車に影響を与える懸念も指摘されている。
特に都市部の交差点では、交差点形状が広く横断歩道の脇から横断する歩行者なども存在するため挙動が予測できず、スムーズな走行に支障が生じやすい。
このため、短期的には専用走行空間での走行をベースに、交差部に踏切状のバーを設置するなど物理的な分離や信号現示の調整を行うといった措置が望ましく、右左折信号などがあり交通流が複雑でない交差点が求められる。
中長期的には混在空間を想定し、交差点内での走行経路の分離や歩行者の乱横断の抑制が可能な交差点形状が求められる。信号連携やカメラ・センサーなどによる対向車状況の把握など、これらが行いやすい交差点形状の検討なども必要としている。
バス停について
一定条件が整ったバス停では精度が高い正着が可能で、適切な位置に停車することができるが、その精度を生かすためには他の交通主体との相互影響が少ない状況下での配置が望まれるとしている。
バス停への停車時に大きくハンドルを切るような動作が少ないストレート型のバス停は正着に適している一方、他の交通への影響が大きく追い越しなどが発生してしまうため、バス停からの出発時に課題が生じるという。また、バス停近辺の駐停車車両も大きな障害となっている。
短期的には、専用走行空間など環境が整ったルートが望まれ、ストレート型のバス停は複数車線かつ車線幅が広い道路が望ましい。
中長期的には、バス停周辺での交通環境を把握できるよう、自動運転車両の周辺交通の検知機能向上や、バス停周辺への機器設置による交通状況の把握が望まれるほか、車線数が少ない場合や車線幅が狭い箇所では、前後空間に余裕のあるバスベイの設置が望まれる。
このほか、無人運転を想定し、乗車待ち客などを判断するシステム導入などにも言及している。
バスターミナル・駅前広場について
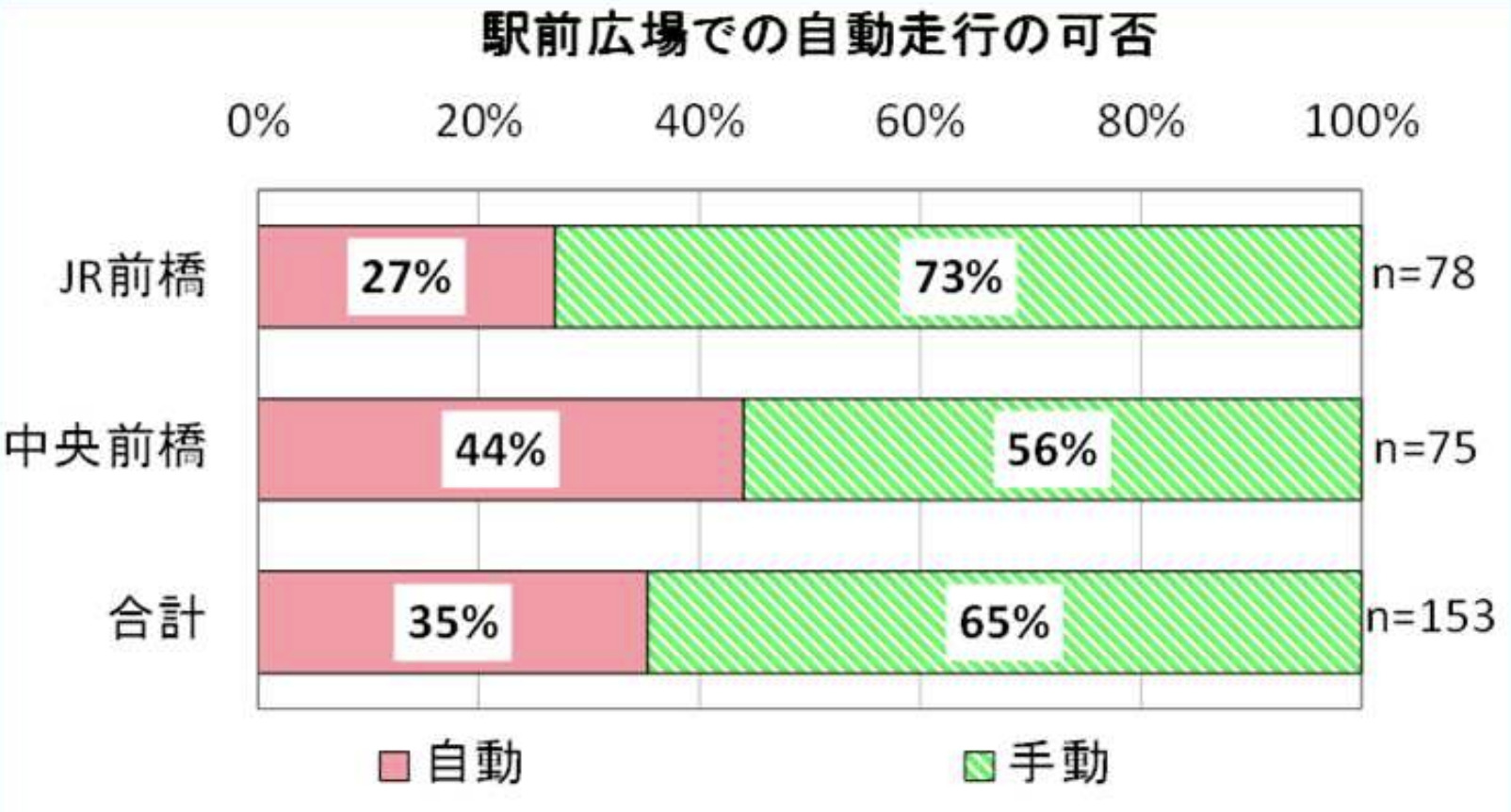
ターミナルや駅前広場などは、一般道に比べ各車両の通行位置などが分かれていることが多く、走行しやすい傾向にある一方、歩行者の乱横断などが散見される箇所もあり、自動車以外の交通との分離も必要としている。
短期的には、一般車と走行経路が異なり、歩行者の乱横断などがない空間であれば、走行方法などのルールの明確化や周知を前提に走行可能としている。
中長期的には、一般車や歩行者空間も含めた駅前広場空間の再配分の検討などを行い、自動運転の特性を生かした空間設計を進めていくことが望まれるとしている。
遠隔操作による運転・運行管理について
ドライバー不足の解消に向け遠隔による自動運転車両の運行状況監視や運転操作を行う技術開発が進められており、複数台を一人で対応する実証なども行われている。
短期的には、遠隔監視・運転操作を行うにあたって必要な技術や設備、求められる通信環境などの整理に向けた知見を蓄積していくことが肝要で、中長期的には、求められる技術水準を取りまとめ、遠隔監視・運転操作者に求められるべき技術や免許制度などを検討する必要があるとしている。
車内対応について
運転技術そのものの自動化に加え、無人化による車内での安全確保やサービス提供に関する課題に対応する必要があり、実証実験に参加した乗客からもサービス面を不安視する意見が多いという。
現在の制度下においては、運賃収受は現金を含む方法を設定する必要があるが、無人化した際はお釣りの受け渡しや運賃額の確認などを行う必要が生じる。
短期的には、開発・実証中の車内確認システムを活用しながら介助や安全確認などの対応を行う必要があるほか、運賃収受方法の拡大を進めていく必要性を指摘している。
中長期的にも、運転士が乗車しない自動運転車においても路線によっては安全確保や介助などを行うサービス要員が車内に必要となることが考えられるため、車内サービスを代替する解決策の検討が必要としている。
運行管理・メンテナンスについて
現時点では実証実験が大半を占めており、車両や自動運転システムも開発途上のものを使用していることが多いため、バス車両自体のメンテナンスなどは交通事業者、自動運転システムやそれに関連する機器の点検や不具合時の対応などは自動運転システム提供者が行うなど、役割分担が図られている。
中長期的には、恒常的なサービスの提供に向け役割分担の明確化や制度整理を行う必要があるほか、自動運転での運行に対する保険への加入や、保険商品に対する責任分岐点の設定なども必要となる。
■【まとめ】中型開発と並行して小型モデルの実用化推進を
中型・大型バスはボディサイズなどから自動運転のハードルが高い一方、持続可能な公共交通の核として需要も高く、早期実現が求められる。
現状、自動運転専用空間の設定などには限界があるため、本格実用化まで時間がかかりそうな中型モデルの開発と並行し、NAVYA ARMAのような比較的小さなシャトルバスやカートタイプなどの導入を推進し、知見を積み重ねていくとともに社会受容性を醸成していくのも王道だろう。
間もなく到来するレベル4社会に向け、実用化に向けた取り組みのさらなる加速に期待したい。
▼基幹的なバス分科会からの報告
https://www.mlit.go.jp/toshi/content/001475320.pdf
※自動運転ラボの資料解説記事は「タグ:資料解説|自動運転ラボ」でまとめて発信しています。
【参考】関連記事としては「自動運転バス・シャトルでの定常サービス一覧(2022年最新版)日本編」も参照。


の評判・口コミは?審査は厳しい?|カーリース・車のサブスク")




の意味・読み方は?自動車業界の新潮流を示す")
ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

