


警察庁所管の「自動運転の実現に向けた調査検討委員会」はこのほど、自動運転関連の事業を対象に課題や要望に関するヒアリングを実施した。
この中で、自動運転シャトルを開発する仏スタートアップのEasyMileは、自動運転レベル4(高度運転自動化)における各オペレーションに求められるべき要求事項を提出資料としてまとめている。
国際規格のISOを基準とし、他の道路利用者との衝突リスクを最小限に抑えること、オペレーション現場での人による介入を最小限に抑えること、システムの自動化率を最大化することを目的に、同社として必要不可欠と考えている要件だ。
この記事では、資料をもとにEasyMileのレベル4サービスに対する考え方に迫っていく。
▼EasyMileのレベル4オペレーションに対する車両と周辺環境の準備と考え方
https://www.npa.go.jp/bureau/traffic/council/08.pdf
記事の目次
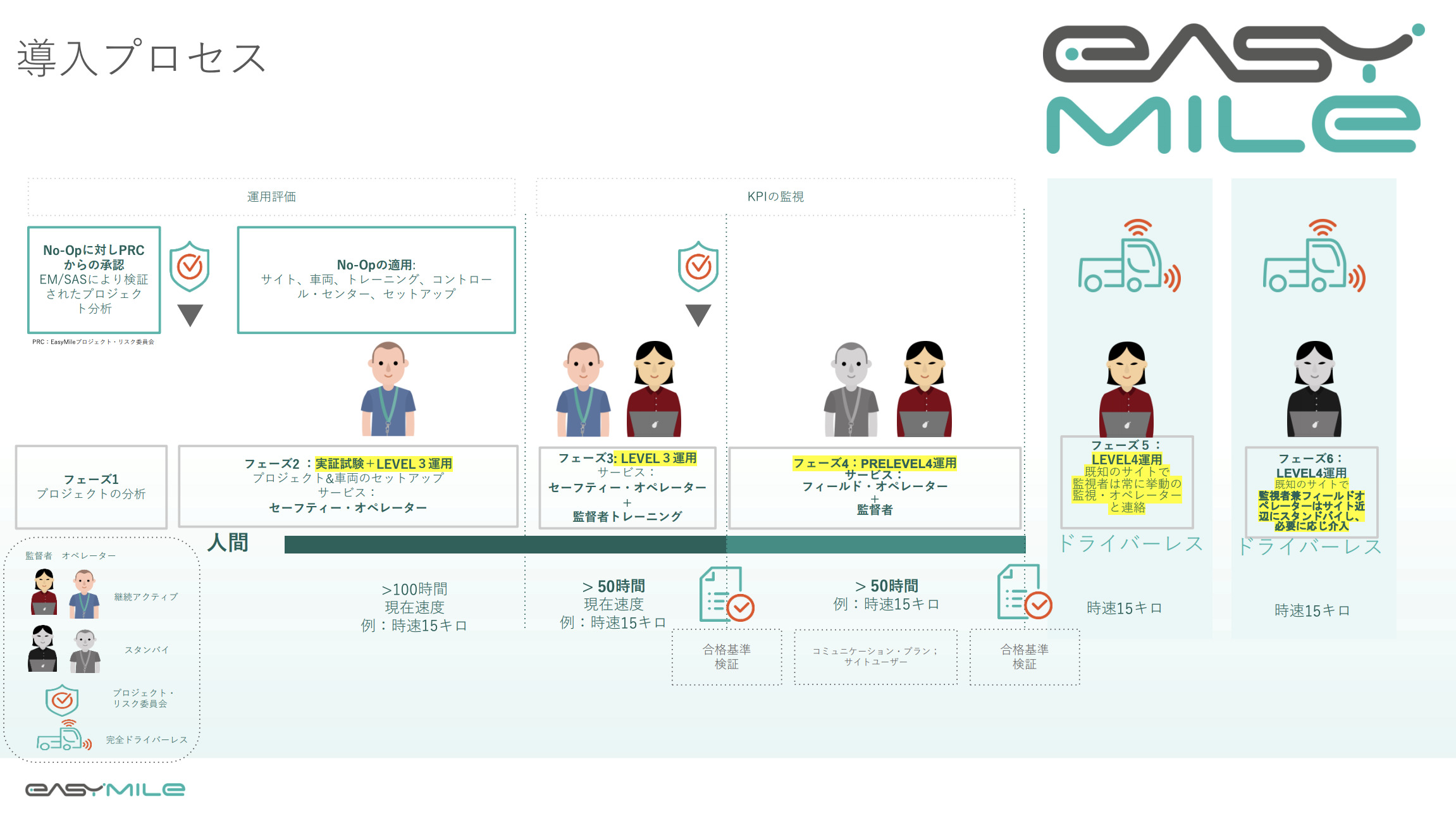
■導入プロセス:フェーズ1〜6でそれぞれ設定
EasyMileの導入プロセスは、フェーズ1でプロジェクトの分析を行い、フェーズ2ではセーフティ・オペレーターのもと実証試験やレベル3での運用を行い、車両のセットアップやサービスの検証を進めていく。目安としては100時間以上を想定している。
フェーズ3では、セーフティ・オペレーターのもとレベル3によるサービス運用を行い、監督者のトレーニングも進めていく。ここでは50時間以上を想定しているようだ。
フェーズ4では、試験的にレベル4による運用を行う。フィールド・オペレーターや監督者のもと、50時間以上の走行を想定している。
フェーズ5では、コントロールセンターなどで監視者が常に監視し、オペレーターと連絡をとりながらレベル4サービスを運用する。フェーズ6では、監視者やフィールド・オペレーターが近隣でスタンバイし、必要に応じ介入する。
■走行現場への要求事項:一般人の進入などについて規定
走行現場・エリアに対する要求事項としては、以下を挙げている。
- ①みなし道路を含む私有地・私有道路では一般人が入ることができないようにする
- ②交差点規制や道路制限速度などを設ける
- ③自動運転車の走行ルートからすべての障害を排除する
- ④LiDARやGNSSがアクティブで、信頼性の高いモダリティのあるローカリゼーションが得られる
- ⑤走行現場全体で4GまたはWi-Fi通信が安定して得られること
①は、私有地などにおける自動運転において、不特定多数の一般人による不測の行動をリスク要因と考え、許可を得た人のみの利用に制限するなど、人流などにも制御すべきという観点だ。
②では、交差点においては常に自動運転車を優先するか、あるいは周辺車両の交差点における速度を時速20キロ以下に下げ、かつ時間当たりの交通量を10台以下に制限することや、道路そのものの制限速度を時速30キロに設定すること、駐車場など常に変化のあるエリアをODD(運行設計領域)から外すことを挙げている。
②以外は必須事項で、②はサービス提供事業者などの当事者が残存リスクとして受け入れる形で適合すべき項目としている。

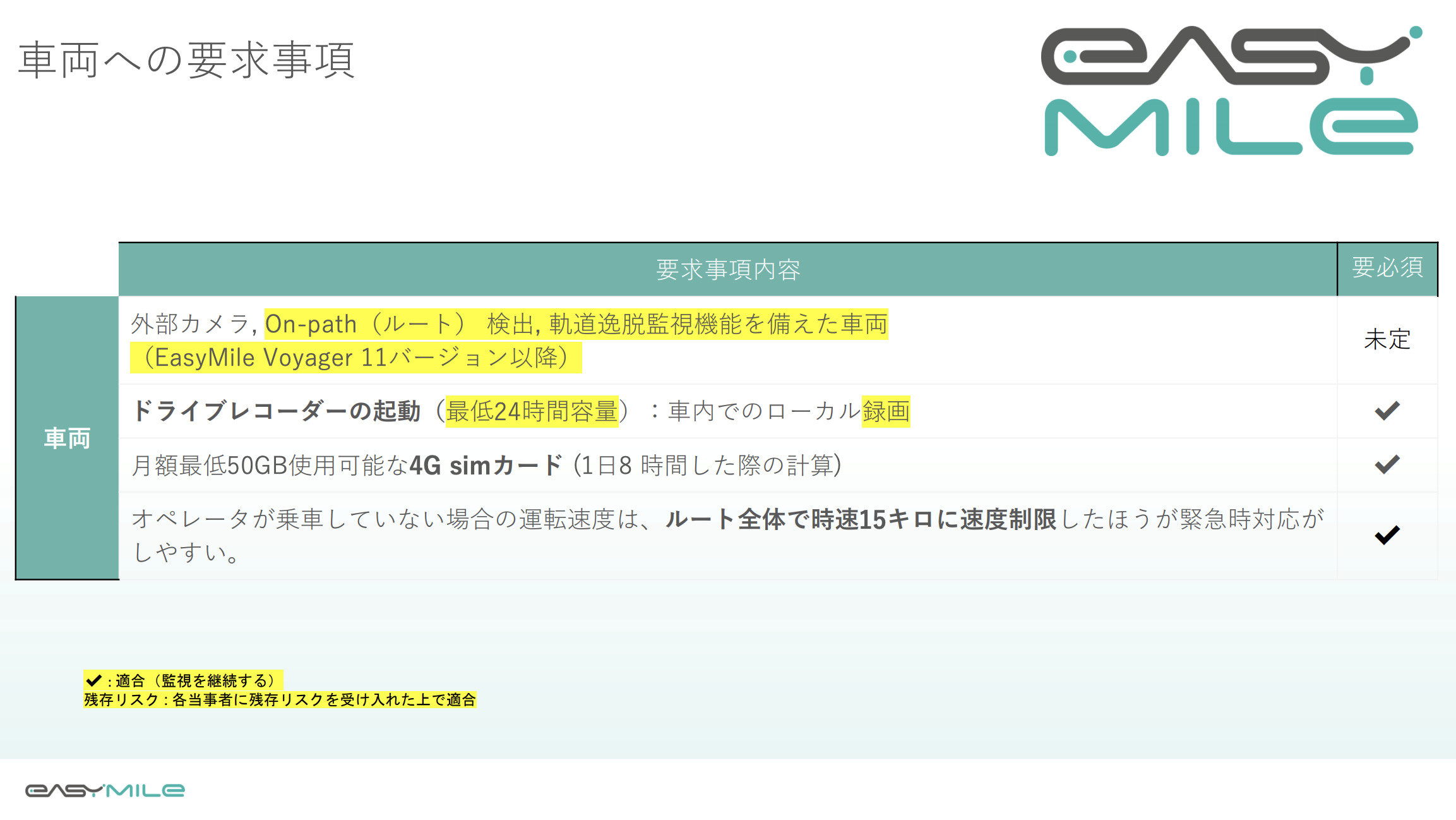
■車両への要求事項:最低24時間記録できるドラレコなど
車両に対する要求事項としては、最低24時間記録できるドライブレコーダーや車内の様子を映すカメラ、最低50GB使用可能な4G SIMカードを必須とし、EasyMile Voyager 11バージョン以降は外部カメラやルート検出、軌道逸脱監視機能を備えることなどを挙げている。
また、付記事項として、オペレーターが乗車しないドライバーレスによる運行速度は、ルート全体で時速15キロに制限したほうが緊急時対応を行いやすいとしている。
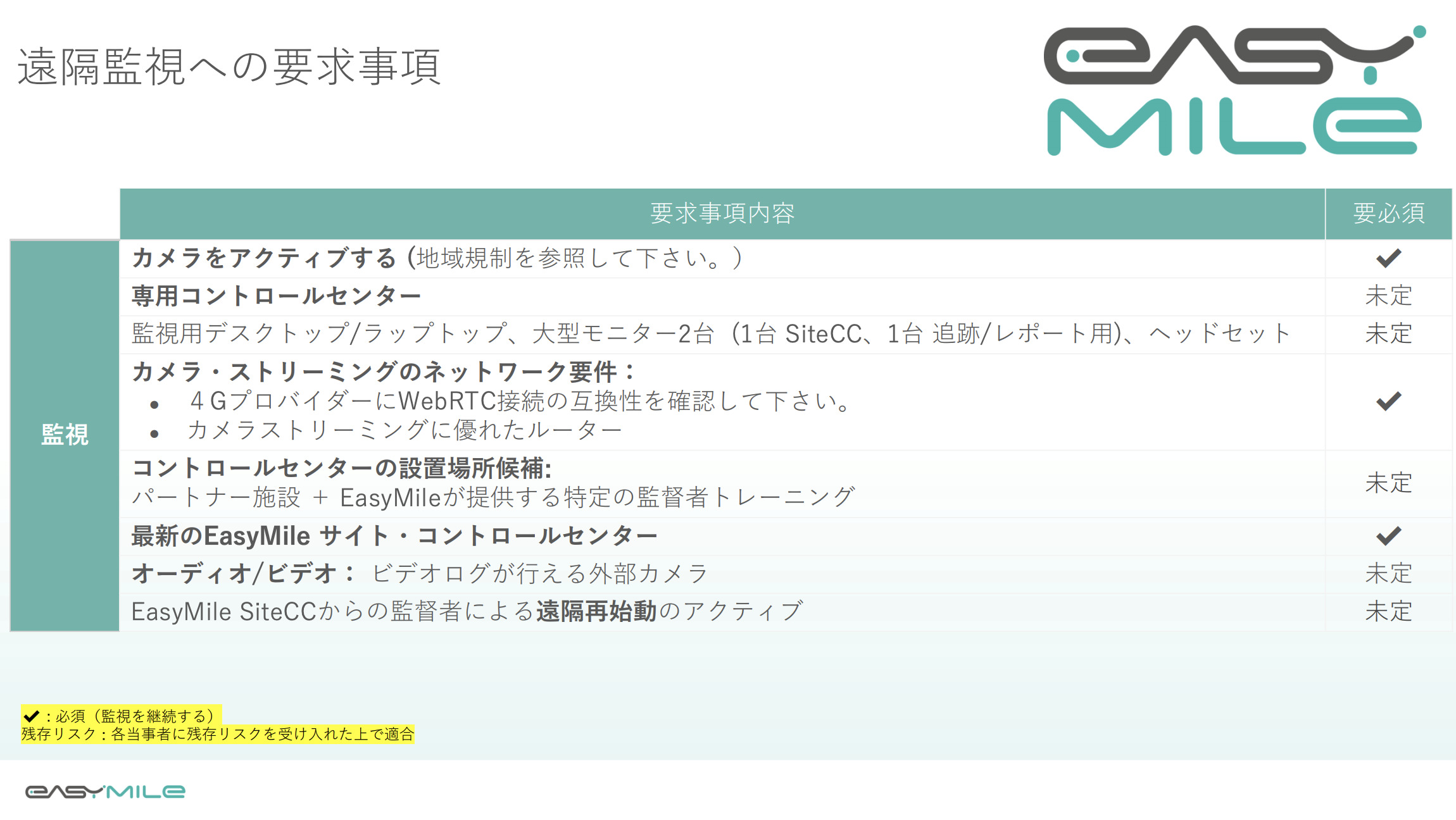
■遠隔監視への要求事項:専用のコントロールセンターなど
遠隔監視への要求事項としては、カメラのアクティブ化や専用のコントロールセンター、カメラ・ストリーミングのネットワーク要件、コントロールセンターの設置場所候補、最新のEasyMileサイト・コントロールセンター、オーディオ・ビデオ( ビデオログが行える外部カメラ)、EasyMile SiteCCからの監督者による遠隔再始動のアクティブ化を挙げている。
コントロールセンターには、監視用デスクトップやラップトップ、大型モニター2台 (1台はSiteCC、1台は追跡・レポート用)、ヘッドセットを備えることとするほか、カメラ・ストリーミングにおいては4GプロバイダーにWebRTC接続の互換性を確認する点やストリーミングに優れたルーターを要する点を挙げるなど、要件を細かに記している。
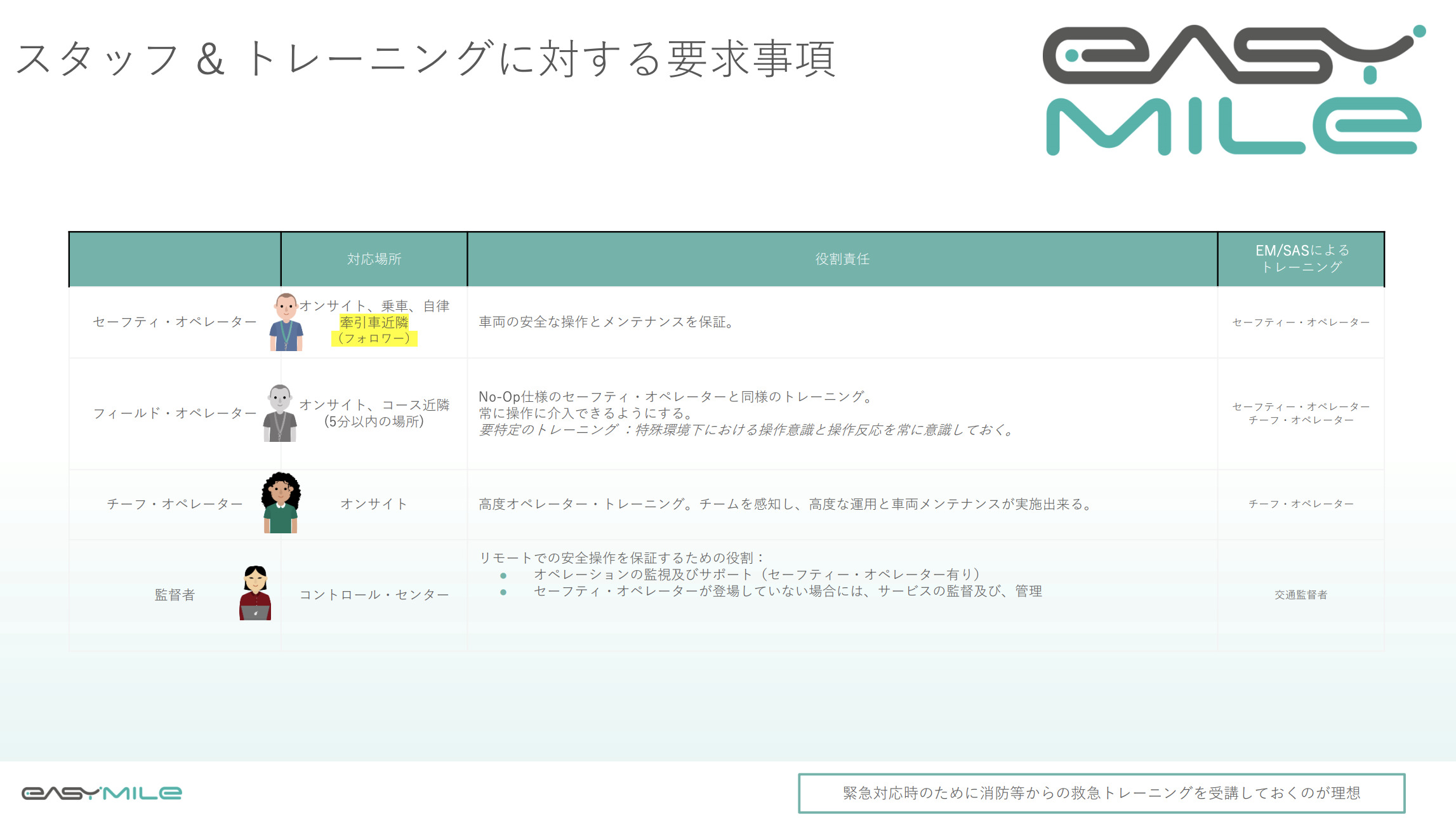
■スタッフやトレーニングに対する要求事項
スタッフ関連では、セーフティ・オペレーター、フィールド・オペレーター、チーフ・オペレーター、監督者を挙げている。
セーフティ・オペレーターは車両の安全な操作とメンテナンスを保証する役割として、オンサイトや乗車、近隣などで対応にあたる。
フィールド・オペレーターは、セーフティ・オペレーターと同様のトレーニングを行い、常に操作に介入できるようにするほか、特殊環境下における操作意識と操作反応を常に意識しておくこととしている。
チーフ・オペレーターは、高度なオペレータートレーニングを積み、チーム全体を把握し、高度な運用と車両メンテナンスを行えるようにする。
監督者は、コントロールセンターでリモートによる安全操作を保証する役割を担う。オペレーションの監視やサポート、セーフティ・オペレーターが車両に同乗していない場合にはサービスの監督や管理を行う。
■特定の運用条件
特定の運用条件では、GNSSや4Gなど、各テスト走行を監視するために良好な通信環境を確保するほか、気象条件による運用規定を厳格に順守することとしている。
■EasyMileとはどんな企業?
自動運転シャトル「EZ10」を主力に応用展開も
2014年創業のEasyMileはレベル4の自動運転シャトルの開発を中心に事業を展開している。イメージとしては仏Navyaに近く、12人乗りの自動運転シャトル「EZ10」が主力となっている。
EZ10は4,050 ×1,892×2,871ミリのボックス型で、大雨や雪、霧などの天候に対応し、マイナス15〜45度の環境下で走行することができるという。フリート展開も可能だ。最高時速は約40キロとなっている。
実証走行を含め世界30カ国以上の300以上のエリアで運行実績があり、総延長は80万キロに達する。同社によると、自動運転シャトルにおいて世界シェアの60%にあたる180台の以上の車を展開しているという。
日本では、DeNAが2016年にEZ10を導入し、「Robot Shuttle(ロボットシャトル)」として私有地における実証や道の駅を拠点とした自動運転サービス実証などに活用されている。
近年は自動運転システムの応用展開にも力を入れており、EZ10で実証した専門知識や技術を新しいプラットフォームに適用する専用のインキュベーターチームを提供している。
【参考】EasyMileについては「世界シェア60%!?自動運転シャトル開発の仏EasyMile、資金増強」も参照。
世界シェア60%!?自動運転シャトル開発の仏EasyMile、資金増強 https://t.co/XjooWw4ahJ @jidountenlab #自動運転 #シャトル #EasyMile
— 自動運転ラボ (@jidountenlab) May 4, 2021
スタッフのトレーニングにも注力
EasyMileの公式サイトによると、サービス導入においてはまずスタッフが現地を訪問し、ドライバーレステクノロジーの導入環境を評価する。同社のスタッフまたはトレーニングを受けたパートナーがオンサイトでインフラストラクチャ要件を検証し、ルート設定の後確立された手法でテストを実施してプロジェクトを安全に展開できることを確認する。
オペレーターのトレーニングも重要視しており、パートナーがソフトウェアを搭載した自動運転車を安全に配備・運用・保守する際に信頼性と独立性を確保できるよう、「運用プログラム」「監督プログラム」「展開プログラム」「メンテナンスプログラム」など複数のトレーニングコースを提供している。
運用プログラムでは、すべての操作タスクを学ぶほか、社内トレーナーの育成も行うことができる。監督プログラムでは、トラフィック管理ツールのもと、サービス中にフリートを監視、調整するタスクを学ぶ。展開プログラムでは、さまざまなレベルの複雑さで車両のセットアップを実行することができる。
これまでに世界各地で約1,000人にトレーニングを行っており、研修を受けたオペレーターを認定する証明書も発行している。
■【まとめ】重要性増すスタッフトレーニング
レベル4サービスを提供する多くの事業者において共通する部分が多いものと思われる。コントロールセンターや通信環境などインフラ的に必須とされる要素は当然として、業務にあたるスタッフのトレーニングに力を入れている点がポイントだ。
自動運転技術がレベル5に限りなく近づくほど高度化するまでは、さまざまな点で人が介入する余地があり、人為的なミスによる事故や事案の発生が懸念される。
今後、自動運転サービスの提供においては、どのようなスタッフが必要で、それぞれどのような知識や技術を備えなければならないのか――といった基準も必要となるのかもしれない。
※自動運転ラボの資料解説記事は「タグ:資料解説|自動運転ラボ」でまとめて発信しています。
【参考】自動運転における人為的ミスについては「自動運転、ヒューマンエラーによる事故パターンまとめ」も参照。
とは?搭載する自動車の車種は?自動運転ではない?")

とロボタクシーを徹底解説")


とは?いつ実現?")

の意味・定義・読み方は?自動車業界の新潮流を示す")
ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

