


千葉県柏市で行われた自動運転実証で、道路上のゼブラゾーンを消去したところ、自動運転車の手動介入回数が減少したという。自動運転時代のインフラの在り方を議論する「自動運転インフラ検討会」で示された資料から明らかとなった。
逆の言い方をすれば、ゼブラゾーンが自動運転の妨げになっているケースがあるということだ。なぜゼブラゾーンが自動運転の支障となるのか。同検討会の議論の中身とともに、一般道におけるインフラ整備の最新動向に迫る。
▼自動運転車とのインフラ連携の取組について
https://www.mlit.go.jp/road/ir/ir-council/jido-infra/pdf04/01.pdf
記事の目次
| 編集部おすすめサービス<PR> | |
| 自動車保険 スクエアbang!(一括見積もり) 「最も安い」自動車保険を選べる!見直すなら今! |  |
| 新車定額!リースナブル(車のカーリース) お好きな車が月1万円台!頭金・初期費用なし! | |
| 車業界への転職はパソナで!(転職エージェント) 転職後の平均年収837〜1,015万円!今すぐ無料登録を | |
| タクシーアプリは「DiDi」(配車アプリ) クーポン超充実!「無料」のチャンスも! | |
| 編集部おすすめサービス<PR> | |
| スクエアbang! |  |
| 「最も安い」自動車保険を提案! | |
| リースナブル | |
| 新車が月々2万円から! | |
| パソナキャリア | |
| 転職後の平均年収837〜1,015万円 | |
| タクシーアプリDiDi | |
| クーポンが充実!「乗車無料」チャンス | |
■自動運転×ゼブラゾーンの問題
柏市で交差点付近のゼブラゾーン縮小・消去を試行
自動運転インフラ検討会の資料によると、千葉県柏市内で行われている自動運転実証でゼブラゾーンの消去が行われたようだ。
同市の柏の葉地区では、先進モビリティや東京大学などが2019年度から実証を進めているが、2024年度に「RoAD to the L4」プロジェクトのテーマ4「混在空間でインフラ協調を活用したレベル4に向けた取り組み」に選定された。
インフラ協調システムを導入することで安全性を高め、同所では2026年1月から中型自動運転バスのレベル4運行が行われている。
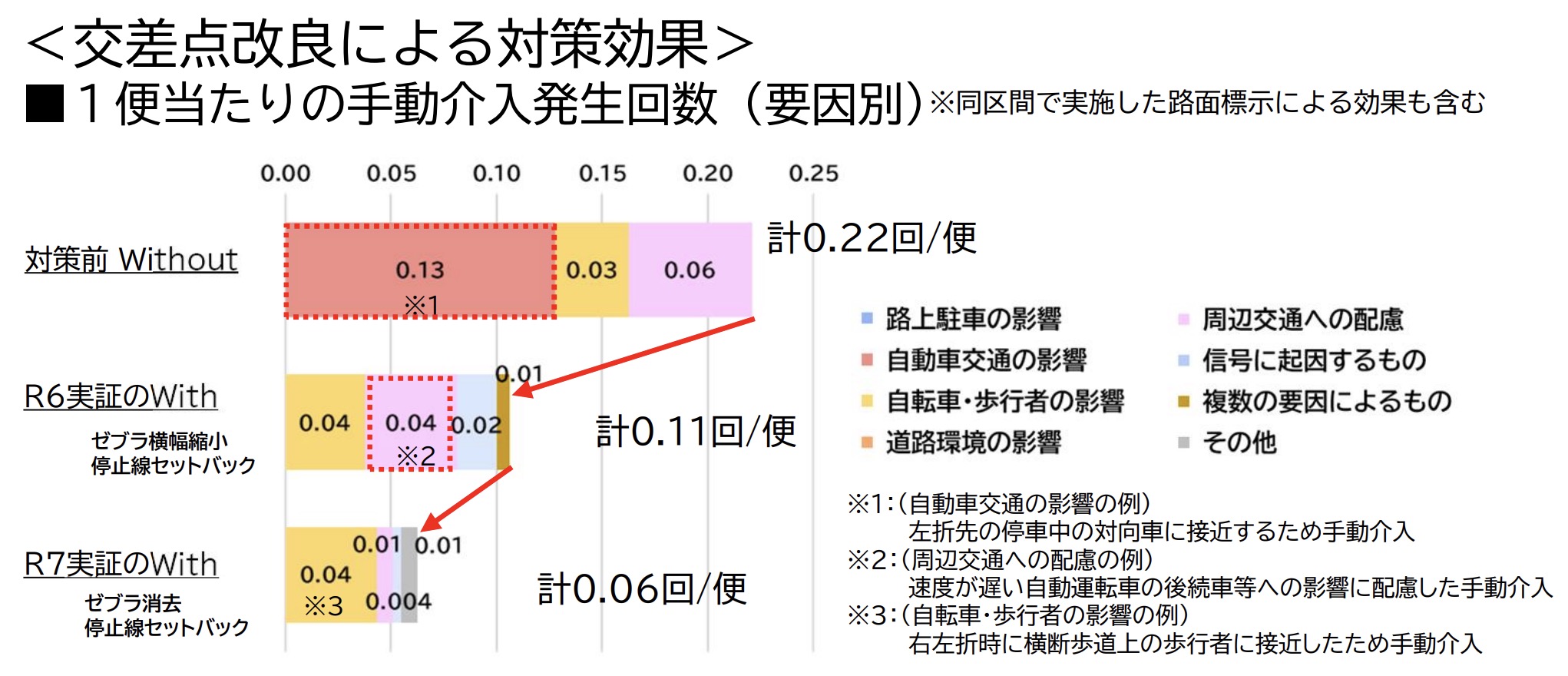
同所では、つくばエクスプレスの柏の葉キャンパス駅から東京大学柏キャンパスまでの片道約2キロのルートで実証しており、2024年度の実証では、路上駐停車抑制のための路面標示及び路肩へのラバーポールの設置、自動運転バスと一般車両がすれ違いやすくなるよう交差点停止線の位置変更、自動運転バスがスムーズに走行できるようゼブラゾーンの形状変更、自動運転バスの接近を歩行者に知らせるデジタルサイネージの設置――を行った。
ゼブラゾーンの形状変更(縮小)は右折交差点手前の2カ所だ。翌2025年度の実証では、このうち1カ所のゼブラゾーンを消去した。
ゼブラゾーンの縮小は、グーグルマップでも確認できる。2025年9月撮影のマップと2024年6月撮影のマップを比較すると、明らかにゼブラゾーンが小さくなっている。
これらの取り組みの結果、対策前は1便当たり0.22回の手動介入が発生していたが、2024年度では同0.11回、2025年度には同0.06回まで減少したという。着実に成果を上げているようだ。また、一般ドライバーに対する安全性の向上も確認できたとしている。
ゼブラゾーンはあいまいな存在?
なぜ、ゼブラゾーンを縮小・消去すると自動運転の手動介入が減少するのか。それは、ゼブラゾーンのあいまいな位置づけに起因するものと思われる。
ゼブラゾーン=導流帯は、車両の安全かつ円滑な走行を誘導する必要がある場所に設けられるシマシマの斜線地帯だ。道路標示の一種で、道路交通法上は規制されておらず、「道路標識、区画線及び道路標示に関する命令」の中に登場する。
▼道路標識、区画線及び道路標示に関する命令
https://laws.e-gov.go.jp/law/335M50004002003/
交差点付近や車線減少区間などに設置されることが多く、斜線地帯をドライバーに意識させ、なるべく入らないよう促すことで安全・円滑な交通に資する目的がある。つまり、「入らない」ことをお願いしているのだ。
道路交通法上の規制はなく、お願いレベルの指示に留まるため、ドライバーによっては遠慮なく進入するケースも目立つ。交差点手前の右折レーン誘導など、場所によっては進入した方が直進車の邪魔にならず円滑な交通を保つことができる……と判断する人もいる。
つまり、なるべく入らないようにするドライバーもいれば、遠慮なく進入するドライバーもいるのだ。たまに、ゼブラゾーンをかわしていざ右折車線に入ろうとした際、ゼブラゾーンに早くに進入した後続車とぶつかりそうになる……といった事案も発生している。
また、ゼブラゾーンをかわして右折車線に入ろうと思っても、斜線の中まで右折待ち車両がずらりと並び、入れなくなることもある。意外とトラブルが潜んでいるのだ。
自動運転車は原則ゼブラゾーンに進入しない?
自動運転に話を戻すと、自動運転車は基本的に規則正しい運転行動を行う。道路交通法上の規制ではなくても、原則として道路標示に従って運転を行うため、多くの場合ゼブラゾーンを回避するよう設計されている。
このため、ゼブラゾーンから進んでくる後続車への注意や、右折車列に入れず直進車の邪魔になる……といった懸念が生じ、場合によっては手動介入して右折レーンに入ることになる。
実際、愛知県で行われた自動運転実証でも、同様のことが起こったそうだ。同県の「自動運転社会実装モデル構築事業」において、NTTコミュニケーションズや先進モビリティなどが実施した実証で、右折レーンの車列がゼブラゾーンや直進車線まで続いている場合、あらかじめ設定したゼブラゾーン終了後の経路では右折レーンへの合流が難しいことから、車列の後ろに付けるため手動介入したという。

▼愛知県の実証(p.13)
https://www.pref.aichi.jp/uploaded/attachment/509370.pdf
このゼブラゾーン問題への対策としては、自動運転車がゼブラゾーンへの進入を柔軟に判断するようシステムを設計する――という方向もありそうだが、規則正しい自動運転車の運用にはなじまない。
となれば、道路交通の安全に配慮しつつ、ゼブラゾーンの縮小や消去を検討するしかない。それが今回の実証だ。現場の状況を見る限り、ゼブラゾーンを削っても安全性を損なう要素はほぼ見当たらない。
結果として、ゼブラゾーンの縮小・削減は、自動運転車の円滑な運行に資する――ということになったのだ。
すべてのシチュエーションに通じるとは限らないが、各地の自動運転ルートにおいても、今後ゼブラゾーンの見直しが進められる可能性は十分考えられるだろう。
■一般道の自動運転移動サービスに求められるインフラ支援の概要
インフラ整備に向け2025年度は14自治体で実証
混在空間となる一般道の自動運転サービス実現には、交差点などにおいて車載センサーでは検知困難な道路情報を交差点センサーなどで検知し、自動運転車両に提供することで安全走行を支援する路車協調システムや、自動運転の継続や交通全体の安全性向上に資する走行空間を整備するなど、インフラ側の支援が求められる。
そこで、路車協調システムについては、道路法上の自動運行補助施設に対応する設置基準や点検要領といった技術基準の作成、走行空間の整備については一定のガイドライン(事例集)の作成を検討しているようだ。
これらの作成に向け、2025年度は柏市を含む14自治体で実証が行われた。実証場所は以下の通りだ(カッコ内は使用車両システム/提供事業者)
<路車協調システム>
・北海道上士幌町( ARMA/BOLDLY)
・北海道千歳市 (エルガ/アイサンテクノロジー)
・茨城県日立市(Minibus/ティアフォー)
・茨城県常陸太田市(EVO/マクニカ)
・栃木県下野市(エルガミオ/先進モビリティ・三菱重工業)
・新潟県弥彦村(MiCa/BOLDLY)
・石川県小松市(Minibus/ティアフォー)
・岐阜県岐阜市(ARMA/BOLDLY)
・愛知県春日井市(AR-07/エクセイド)
・大阪府四條畷市(AR-07/エクセイド)
・大阪府堺市(BYD J6/先進モビリティ)
・兵庫県西宮市(Minibus/ティアフォー)
・広島県福山市(Minibus/ティアフォー)
<走行空間>
・大阪府堺市(BYD J6/先進モビリティ)
・千葉県柏市(エルガミオ/先進モビリティ)
対向車の検知で路車協調システムが活躍
路車協調の事例では、右折時、遠方の対向車を車載センサーで検知できない際(小松市)や、対向大型車の死角を車載センサーで検知できない際(福山市)に、路車協調によって物標を検知する例などが紹介されている。
評価対象の千歳市、日立市、小松市、堺市、福山市では、路車協調システムを活用することで信号交差点右折時の手動介入発生割合は14.5%(ユースケース63/435件)から3.9%(同22/536件)に減少した。10.6ポイントの減少だ。
一方、下野市では路側カメラの固定部材の沈み込みにより、画角が変化して検知性能に影響が発生するトラブルがあった。四條畷市では、路側に設置したLiDARの処理プログラム不備により、誤った情報が提供され手動介入が発生する例もあったという。
2026年度の実証は、設置から管理に至る一連の運用に係る知見が必要となるため、自動運転の実装が近い先行的事業化地域において実施する方針だ。
路車協調システムの設置や維持管理などの運用について、自治体などに運用に関する知見が少なく、役割分担も不明確であるほか、必要とする情報の内容や性能などの要件が不明確な点、異常時対応の運用が不明確で、長期運用におけるリスク管理や障害対応の検証が必要な点などが課題として挙がったことから、2026年度は道路管理者と運行事業者などの役割分担の明確化や、車両側ニーズを踏まえた情報提供要件の整理、長期運用を見据えた対応などに留意することとしている。
走行空間の整備は事例を取りまとめ、検討手法などを確立
走行空間整備に関する実証においては、これまでの実証を通じて、自動運転車両の技術レベルや特性、走行空間上の課題に応じて必要となる対策や検討の観点が異なることが明らかとなった。
路上駐車回避機能の有無といった車両の技術レベルや、ルールベース・エンドツーエンドなどの車両の特性を踏まえて対策内容を検討することが重要とする一方、走行空間上の課題の把握手法や対策内容の選定方法、効果の検証方法についての知見が不足しており、対策による効果を適切に把握し、必要に応じて追加対策・改善を図ることが重要としている。
2026年度は、課題把握から対策検討、効果検証に至る一連の手順を整理するとともに、各地の実証ノウハウや知見を踏まえた検討を行う必要があるとしている。
走行空間上の課題と車両特性から事例整理同様の課題に対する各地の対応事例を自動運転車両の特性などの観点から整理したうえで対策内容を検討する。各地で採用された課題の把握手法、効果検証方法について整理・把握を進め、検証方法などを確定する。
その上で、各地域における導入までの検討手法(課題把握→対策実施→効果検証→改善)を整理し、実施計画に反映していく。
2026年度の実証エリアは、以下が予定されている。デジタル庁が選定した先行的事業化地域(13地域)のうち5地域と連携し、路車協調システムや走行空間整備の実証を行っていく方針だ。
<路車協調システム>
・茨城県つくば市(Minibus 2.0・ポンチョ/ティアフォー)
・宮城県仙台市(Minibus 2.0・エルガ/ティアフォー)
・京都府(Minibus 2.0/ティアフォー)
・香川県三豊市(EVO3/NAVYA)
<走行空間整備>
・茨城県日立市(Minibus 2.0/ティアフォー、エルガミオ/先進モビリティ)
E2E実現を見据えた動きも
このほか、自律型も含めた自動運転車とインフラの連携のあり方を検討するにあたり、自動運転技術に関する最新動向を把握するための場として「AI・自動運転タクシー等WG」を設置し、関係者との意見交換を進めた。E2E自動運転の実現を見据えたインフラ整備の在り方に関する検討だ。
委員からは以下の意見が出されている。
- AI学習においては、人間の判断と同じような運転を目指しているため、カメラで判断できる情報が提示(工事看板など)されているなど人間が運転しやすい道路はAIにとっても運転しやすいと言える
- 乗降地の情報や目的地までの工事情報などは重要
- 現在の道路交通情報が自動運転車両に活用可能かに加え、自動運転サービスに必要な情報の精度を検討する必要がある
- 事前に工事や事故情報の提供があれば、効率的な運行計画を立てることが可能となり、無意味な車線変更など無駄な行動を減らすことによる交通安全や渋滞削減に加え、結果として交通全体の最適化に資する可能性がある
- 車両の安全な制御設定や全体最適のためのルーティング設定に対し、何らかのインセンティブを付与する考えもある
- 現状、自治体の工事規制などの道路情報は十分に電子化されておらず、デジタル化するにも費用対効果が十分でない
- 道路工事などで乗降場の位置が変わる場合、自動運転車両に適切な情報提供が出来るよう制度づくりが必要
これらの意見を踏まえ、2026年度は①自動運転車両等との情報連携実証②自動運転社会における道路空間の最適活用――に取り組むことを想定している。
既存の道路交通情報に加え、工事規制などの道路情報や車両側の走行、目的地情報などを連携させる有効性について検証するほか、AIを活用したシミュレーションによる経路選択変化や全体交通最適化の検証などを進める予定としている。
【参考】関連記事「自動運転モデル「ルールベース」「E2Eモデル」とは?」も参照。
■【まとめ】自家用車や一般商用車などにも有効なインフラ連携を
日本では主役となっているレベル4自動運転バスは、一定のインフラ支援で精度・安全性を高めることが一つの理想とされている。一方、完全自律した自動運転を実現すると言われているE2Eも、急な通行止めなどリアルタイムの道路情報を取得することで、ルートプランニングに柔軟に反映できる。
今後は、インフラ整備の全国展開を見据えた費用対効果にも注目したい。仕様が定まれば、自動運転サービスが提供される場所を皮切りにどんどん整備エリアを拡大していくことになるが、膨大なコストが必要となるのは言うまでもない。
コストを国・自治体が負担するのか、運行事業者が負担するのかも詰めなければならないが、自家用車や有人商用車なども有効活用可能な仕組みにすれば、その恩恵は道路交通全体に広がり、設置効果が飛躍的に高まる。
合わせて、ゼブラゾーンの再考なども全国的に進めるべきなのかもしれない。右折レーン手前のゼブラゾーン渋滞が慢性化しているエリアなどは少なくないはずだ。自動運転を契機に、柔軟な視点で道路交通の在り方を見直すのも一手だろう。
【参考】関連記事としては「【最新版】自動運転、日本政府の実現目標・ロードマップ一覧|実用化の現状解説」も参照。







の意味・読み方は?自動車業界の新潮流を示す")
ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

