


政府は、高速道路におけるトラックの「隊列走行」の実用化を目標に掲げている。目標の実現時期は2020年だ。
この隊列走行には、技術レベルに合わせて3つの段階が存在する。国の検討会で使用された自動車工業会(自工会・JAMA)の「資料」でそのことが説明されているので、この3つの段階についてそれぞれの特徴や仕組みを解説していこう。
記事の目次
■トラック隊列走行とは
トラック隊列走行とは、CACC(車車間通信)により制御された数台のトラックが隊列して走行するもの。省エネ効果やドライバーの負荷軽減、安全性や運行効率の向上が期待されている。世界各国で実用化へ向けた取り組みが行われ、アメリカでは既に一部商業運用が始まっている。
日本では現在、先頭車両は「有人」、後続車両は「無人」での隊列走行が実現可能か、実証実験などを通じて検討が進められている。
■1つ目の段階:後続車有人隊列(導入型:自動運転レベル2)
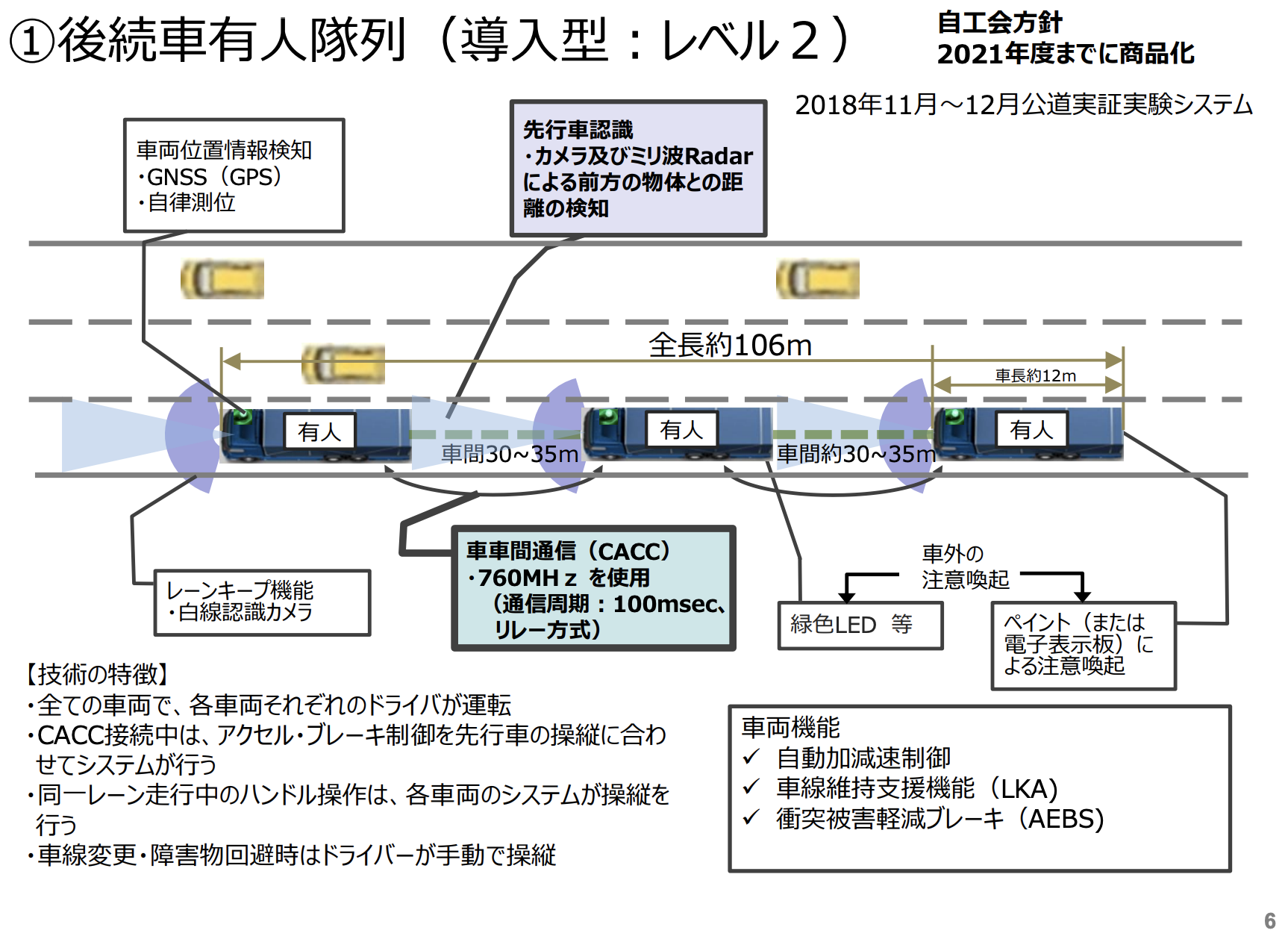
「後続車有人隊列(導入型:自動運転レベル2)」は現行制度下での走行が可能だ。全ての各車両をドライバーが運転の主体となるが、後続車ではシステムが先行者の操縦に合わせてアクセルやブレーキの制御を行う。同一レーン走行中のハンドル操作も後続車のシステムが担う。車線変更や障害物回避はドライバーが手動で行う。
車両機能としては、自動加減速制御やLKA(車線維持支援機能)、AEBS(衝突被害軽減ブレーキ)が備えられる必要があり、この段階での車間距離は30〜35mが妥当なラインだ。JAMAの資料によれば、2021年度までの商品化が目標とされている。
【参考】自動運転レベルの定義については「自動運転レベル0〜5まで、6段階の技術到達度をまとめて解説」も参照。
自動運転レベル0〜5まで、6段階の技術到達度をまとめて解説 https://t.co/3sWcrKWpSp @jidountenlabさんから
— 自動運転ラボ (@jidountenlab) June 21, 2018
■2つ目の段階:後続車有人隊列(発展型:自動運転レベル3)
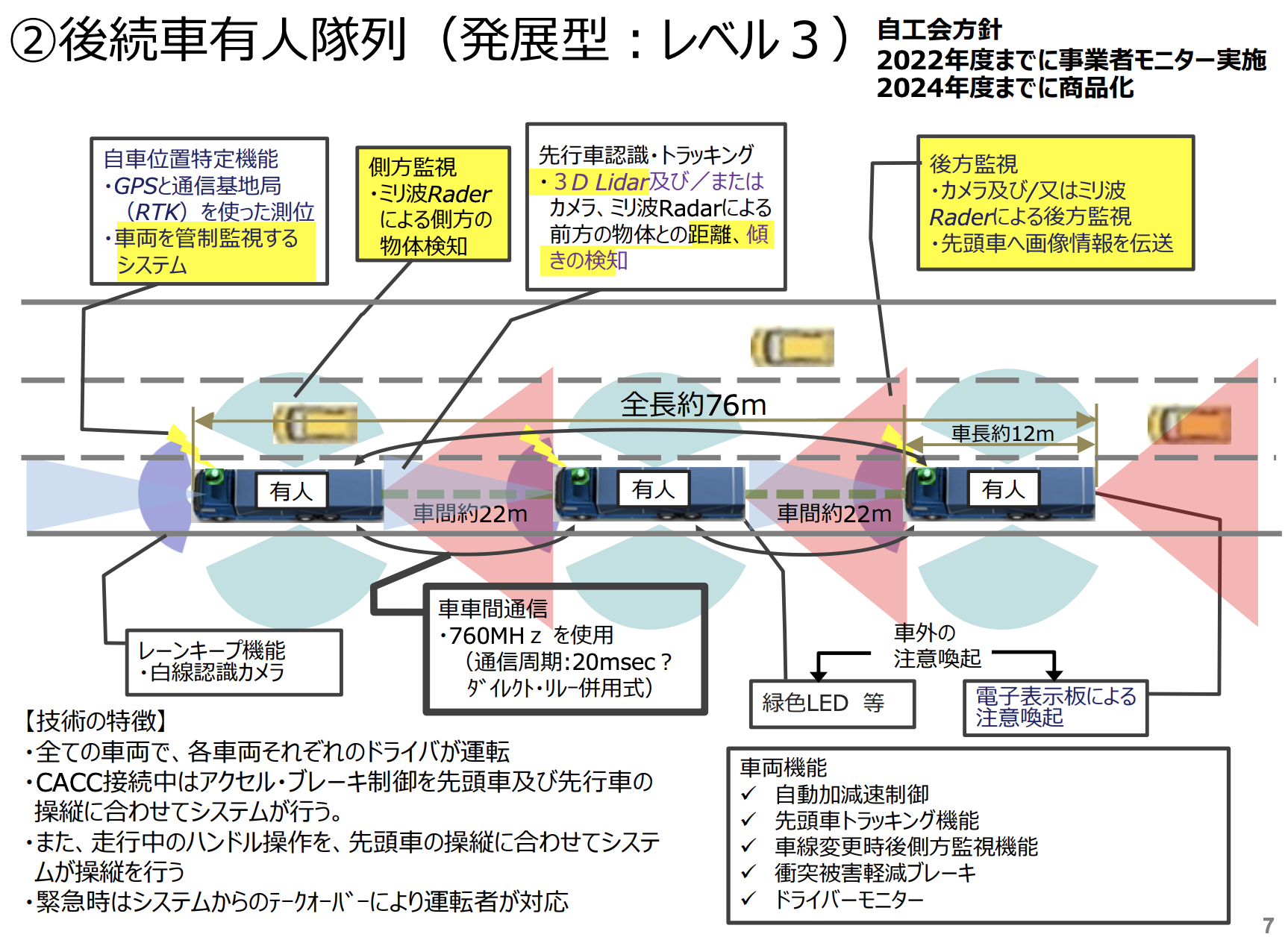
「後続車有人隊列(発展型:自動運転レベル3)」が1つ目の段階と異なる点は、同一レーンを走行するとき以外も後続車のシステムが先頭車に合わせてハンドル操作を行うことだ。このことで、緊急時以外はシステムが運転操作の主体となり、人は運転席に座るものの、緊急時以外は運転操作を行わなくてよくなる。
車両機能としては、新たに「ドライバーモニター」を備える必要も出てくる。緊急時にはドライバーがシステムと運転を交代する必要があるため、運転手がいつでも交代可能な状態か、システム側が把握していなければいけないからだ。
この段階になると車間距離は20〜25mでよくなり、時速80キロまでは改定道路交通法や改正道路運送車両法の下で走行が可能となる。この段階に関しては、2022年度までに事業者モニターを実施し、2024年度までの商品化が一つの目標とされている。
■3つ目の段階:後続車無人隊列走行/自動運転車(自動運転レベル4)
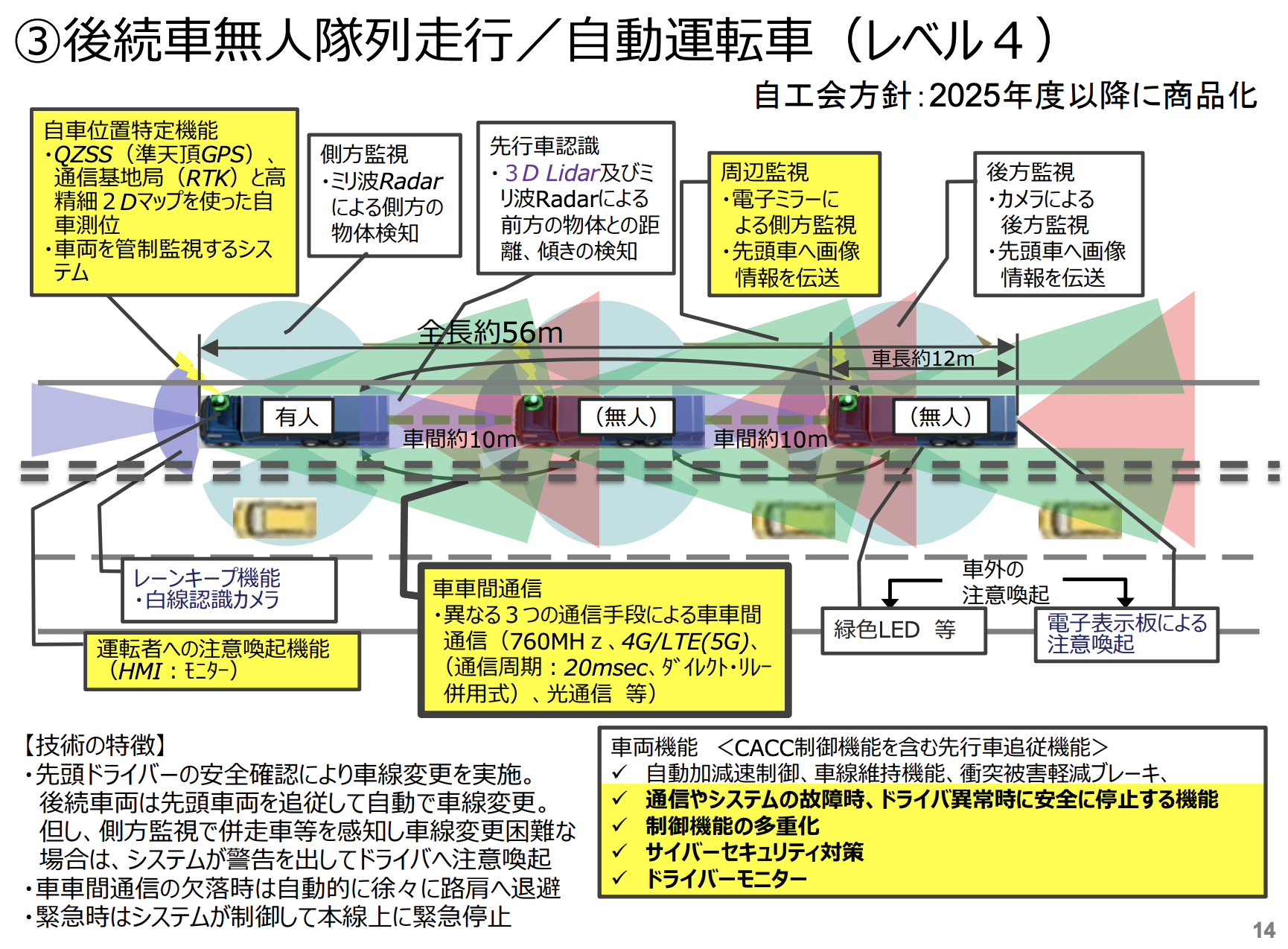
「後続車無人隊列走行/自動運転車(自動運転レベル4)」は、先頭車にはドライバーがいるが、後続車は無人で走行する。先頭車ドライバーの指示により後続車の自動車線変更が可能で、その際、併走車などを感知し車線変更困難な場合は、システムが警告を出して先頭車両のドライバーへ注意喚起を行う。
車車間通信が不通となった際は自動的に後続車は徐々に路肩へ退避する。緊急時はシステムが制御して本線上に緊急停止する。本格的な自動運転が行われるため、高度なサイバーセキュリティ対策が求められる。
この段階は割り込み防止などのため、車間距離は10メートル程度とすることが想定されている。商品化の目標は2025年度以降とされている。
■【まとめ】実現すればドライバー不足の課題解消へ
最終的に後続車に誰も乗らない隊列走行が実現すれば、人口減少によるドライバー不足に対応できる。EC需要も世界的に拡大する中、物流業界における課題解決は待ったなしの状況だ。
【参考】関連記事としては「自動運転トラックの開発状況&企業まとめ 利点は? 実現はいつごろ?」も参照。
は?機能・性能を解説")
タクシーのクーポンコード・キャンペーン一覧!初回無料、友達紹介、2回目以降も使える?")





の意味・読み方は?自動車業界の新潮流を示す")
ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

