


空港オペレーションの自動化を目指す「空港制限区域内における自動走行の実現に向けた検討委員会」はこのほど12回目の会合を開き、自動運転実証の結果報告や今後の課題整理などを行った。
空港における自動運転技術は、現在どういった段階にあるのか。公開されている資料をベースに、空港×自動運転の現在に迫る。
記事の目次
■「検討委員会」の概要
空港業務などの自動化を目指し2018年に設立
訪日外国客の増加などを背景に空港の機能強化が求められる中、地上支援業務(グランドハンドリング)を中心に人手不足が深刻化している。
そこで、IoTやAI(人工知能)、自動運転技術などの先端技術を活用した「航空イノベーション」推進に向け国土交通省が設立したのが「空港制限区域内の自動走行に係る実証実験検討委員会(現・空港制限区域内における自動走行の実現に向けた検討委員会)」だ。2018年の初開催以来、これまでに12回の会合を重ねている。
具体的には、PBB(旅客搭乗橋)の自動装着やランプ車両の自動運転化、貨物ドーリー・牽引車の自動運転化をはじめ、航空機のリモートプッシュバックやリモート牽引、パイロットによる牽引車両操作と牽引車両の自動回送、手荷物の自動積み付け・取り降ろし、搭降載補助、IoTを活用した作業員への情報提供などに取り組んでいくこととしている。
2022年度は4団体が自動運転実証を実施
12回目の会合では、2021~2022年度に実施された実証結果や今後の計画、今後の課題整理、制限区域内におけるレベル4車両に関する運用ルールの策定を進める運用ルール検討WGによる報告が行われた。
実証は、ANA(全日空)と豊田自動織機による「令和3、4年度自動運転トーイングトラクター実証実験」をはじめ、JAL(日本航空)の「令和4年度自動運転トーイングトラクター実証実験」、成田国際空港とNTT東日本(東日本電信電話)、KDDI、ティアフォーの「令和4年度自動運転ランプバス実証実験」、AiROの「令和4年度自動運転トーイングトラクター実証実験」がそれぞれ報告され、委員を交えた質疑応答などが行われた。
以下、各実証の中身について解説していく。
■ANA×豊田自動織機「自動運転トーイングトラクター実証」
ANAと豊田自動織機は、手荷物搬送実証を2021年12~1月、貨物搬送実証を2022年2~3月にそれぞれ羽田空港で実施した。実際の運航便の手荷物・貨物を自動搬送する取り組みで、無人のレベル4運転の実現に向け、交差点自動合流などの課題を抽出した。
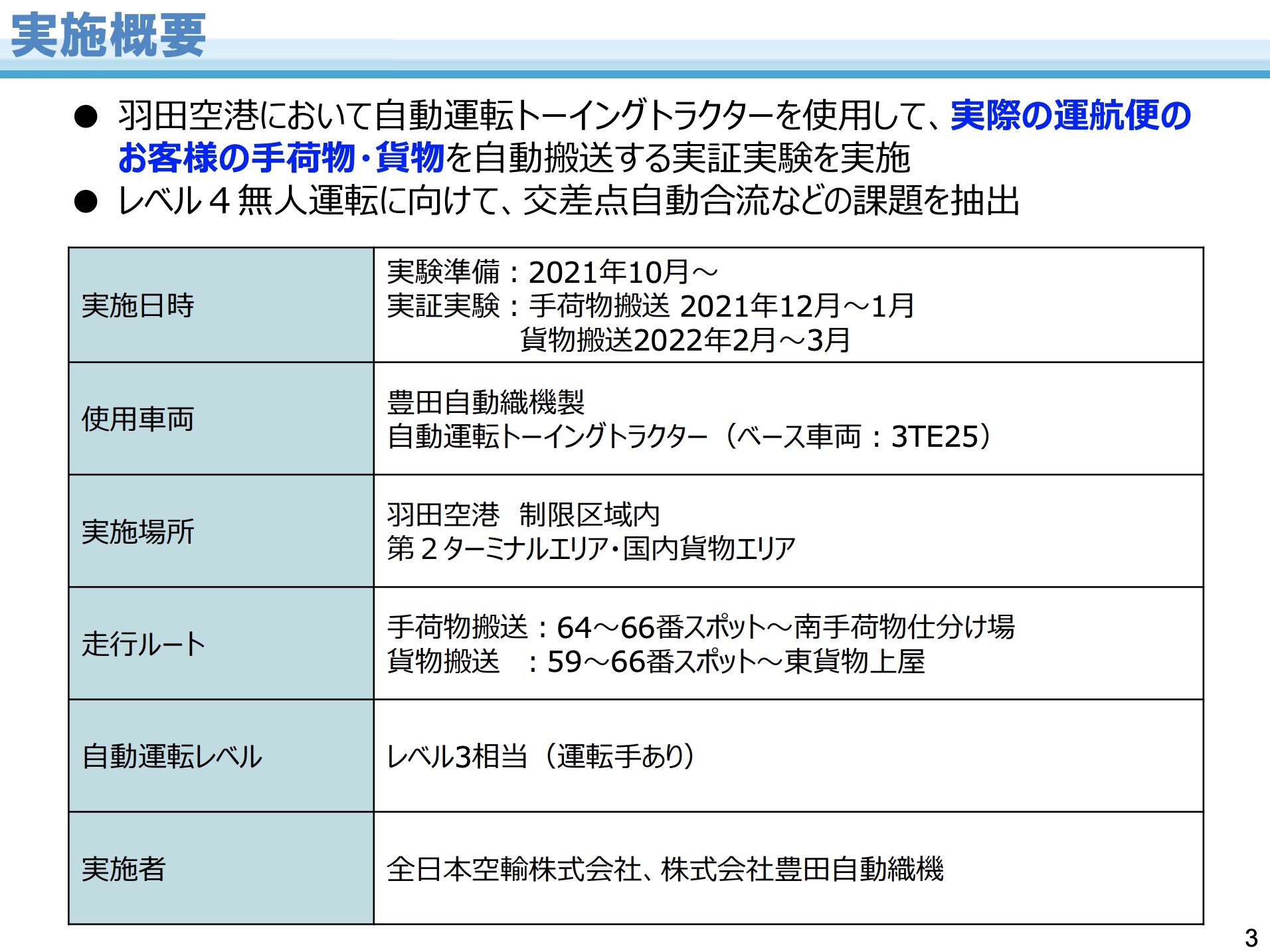
車両は豊田自動織機製の自動運転トーイングトラクターを使用した。路面パターンマッチング(RANGER)、RTK-GNSS、3D-SLAMなどから得られるセンサー情報を統合し、自車両の位置や方向を推定しながら経路上を指定の速度で走行する仕組みで、運転手付きのレベル3相当で走行した。
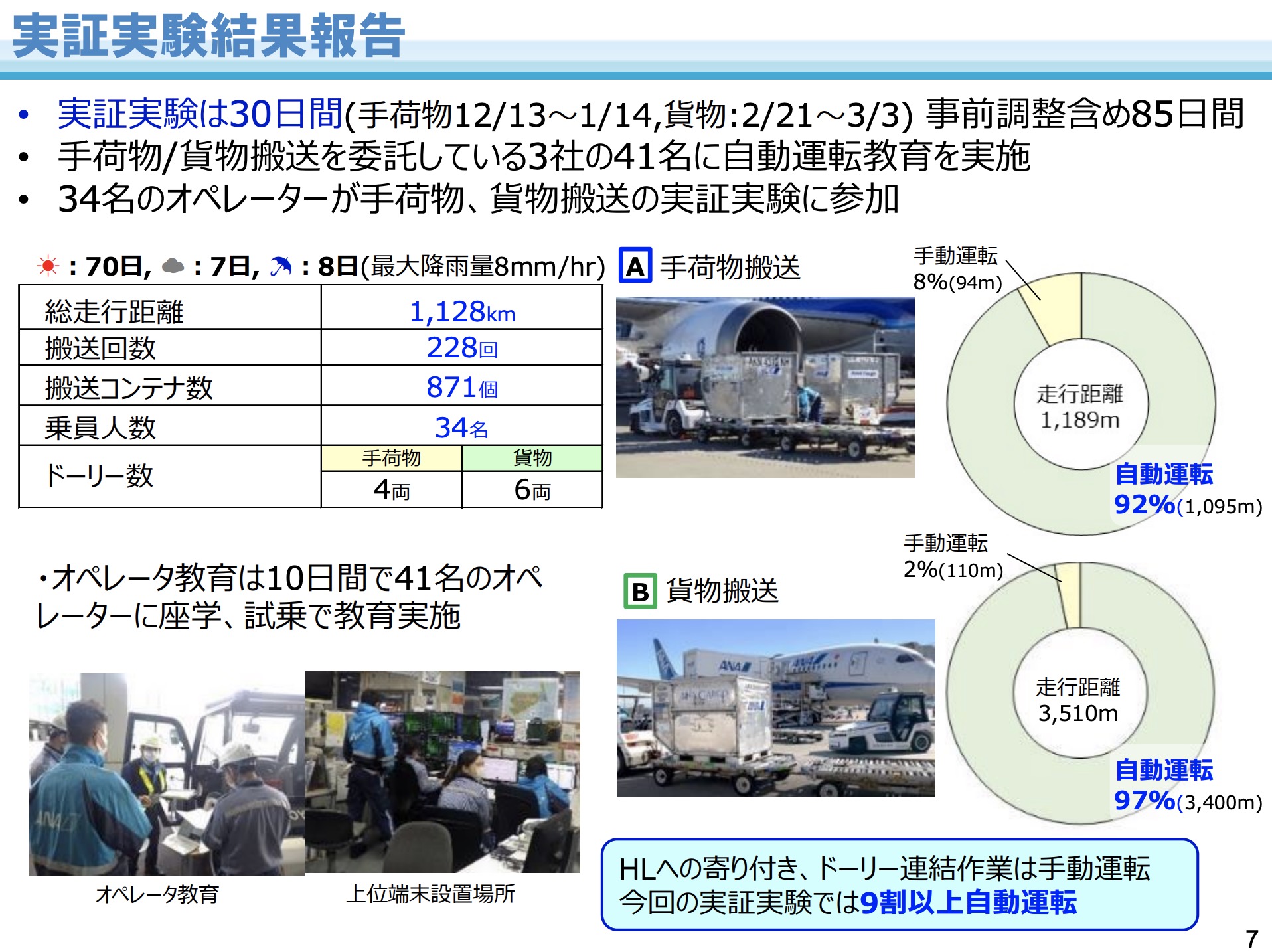
総走行距離は1,128キロで、228回に及ぶ搬送は遅延なく実施できた一方、実証期間中に143回の障害物停止が発生した。スポットや経路内の車両・機材に対し正常に障害物を検出し停止したという。
障害物センサーの課題としては、旅客搭乗橋の下、ソーティング出入口で雨だれを障害物として検知し、急停止した。設備側の落水箇所の配水対応が必要としている。
また、自動合流や自動レーンチェンジにおける課題として、交通量の多い片側2車線道路への合流を挙げた。長距離検知ができないためレベル4では対応できず、交通量の多い交差点においては、自動運転車両と連動した信号機の設置や合流時に自動運転車両を優先するルールなどが必要としている。
その他、電動車運用のための充電設備の整備や、自動運転車両走行のための路面整備、機材・車両の置場ルールの整備などを課題に挙げた。
レベル3は実用化域に達しており、今後はレベル4実用化に向けた次のステップとして2022年11月以降に、トンネルにおける自動運転やパレットドーリー検証などを行う予定としている。
▼資料
https://www.mlit.go.jp/koku/content/001517815.pdf
【参考】ANAと豊田自動織機の取り組みについては「ANAと豊田自動織機、新開発の自動運転トーイングトラクターで貨物搬送」も参照。
■JAL「自動運転トーイングトラクター実証」
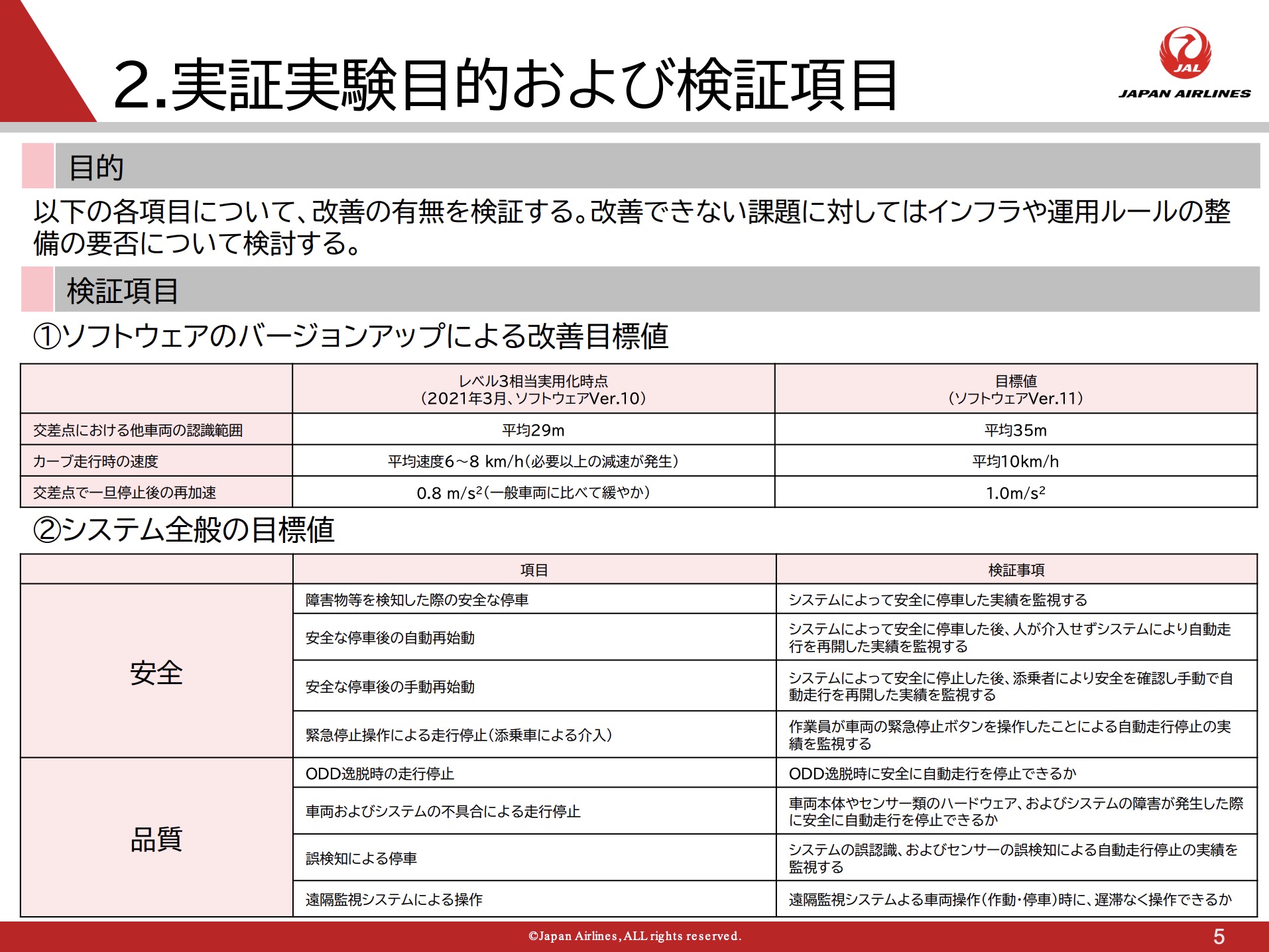
JALは2020年にレベル3実証、2021年にレベル3相当の実用化を図っており、2022年はレベル4に向けた実証に本格着手した。
車両はTLD社製のTractEasyを使用した。LiDARやGPS、Odometry(走行距離計)、IMU(慣性計測装置)で自己位置推定を行うモデルだ。
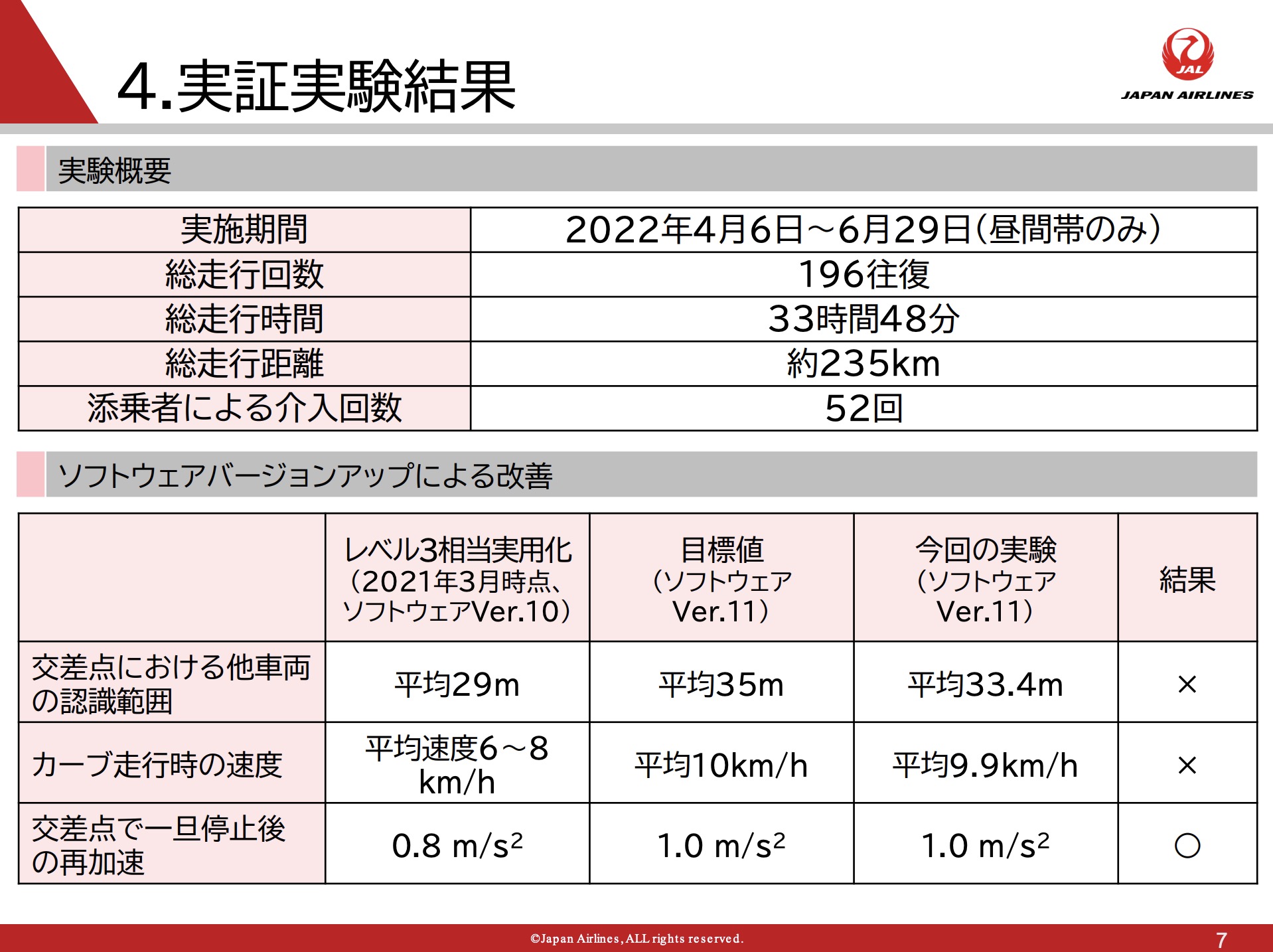
実証は成田空港の第2旅客ターミナルとサテライトターミナル間で実施し、往復約1.2キロメートルのルートを196往復した。
レベル4に向けバージョンアップしたソフトウェア(Ver.11)は、交差点停止後の再加速で目標値を達成したものの、交差点における他車両の認識範囲とカーブ走行時の速度であと一歩目標値に及ばなかったという。
センサーによる誤検知は166回発生しており、このうち161回が雨天時という。濡れた路面を障害物として認識したり、雨滴を誤検知したりといった内容が大半を占めたようだ。
また、セーフティドライバーによる介入は52回で、発生場所は全て交差点だった。他車の速度超過が大半で、その他自動運転システムの他車認識範囲が狭いことが理由に挙げられている。
今後、レベル3相当の実運用と並行してさらにバージョンアップしたシステムで実証を行っていく構えだ。
▼資料
https://www.mlit.go.jp/koku/content/001517816.pdf
【参考】JALの取り組みについては「手荷物搬送×自動運転、「日本初」はJAL!ANAも負けず劣らず取り組み加速」も参照。
■成田国際空港×NTT東日本×KDDI×ティアフォー「自動運転ランプバス実証」
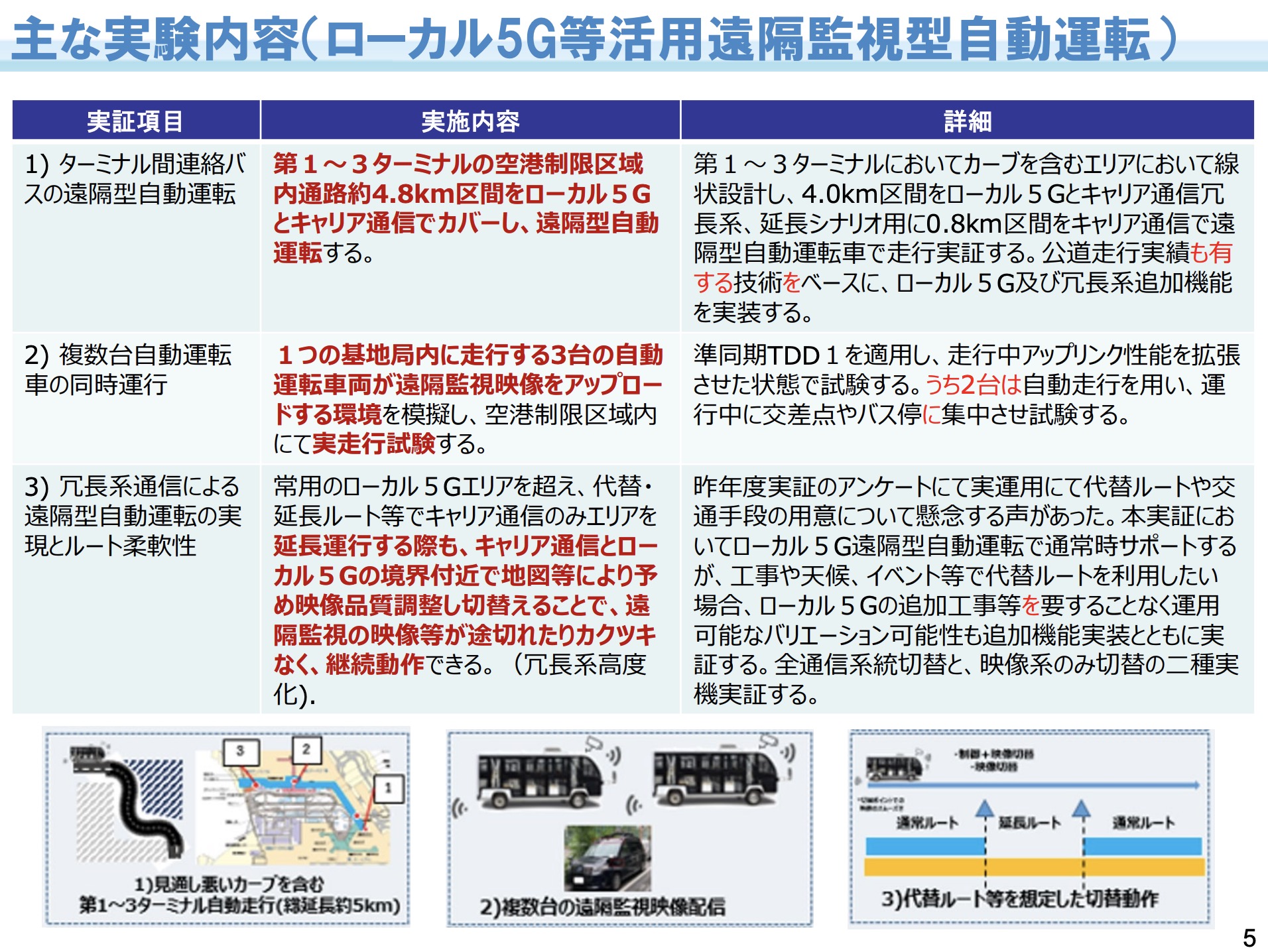
成田国際空港などは、ターミナル間連絡バスのドライバー不足やヒューマンエラーに起因する課題解決に向け、2025年にも同空港にレベル4自動運転を実装する目標を掲げている。
この目標に向け、2021年度に5G通信を活用した遠隔監視による自動運転システム実証を行っており、本年度もより実装に近い運用形式で2022年12月から実証を行う予定だ。

車両は、タジマモーターコーポレーション製「GSM8」にティアフォーの自動運転システムを統合したバスを用いる。高精度三次元地図が整備されており、強い雨や濃い霧ではないこと、時速15キロメートルの制限速度を遵守することを前提に、第1、第2、第3ターミナル間で走行実証を行う。
具体的には、第1~3ターミナルの通路約4.8キロメートル区間をローカル5Gとキャリア通信でカバーする遠隔型自動運転をはじめ、1つの基地局内に走行する3台の自動運転車両が遠隔監視映像をアップロードする環境を模擬する複数台同時運行、キャリア通信とローカル5Gの境界付近であらかじめ映像品質調整して切り替えることで、遠隔監視の映像などが途切れることなく継続動作できる冗長系通信などに関して検証を進める。
▼資料
https://www.mlit.go.jp/koku/content/001517817.pdf
■AiRO「自動運転トーイングトラクター実証」
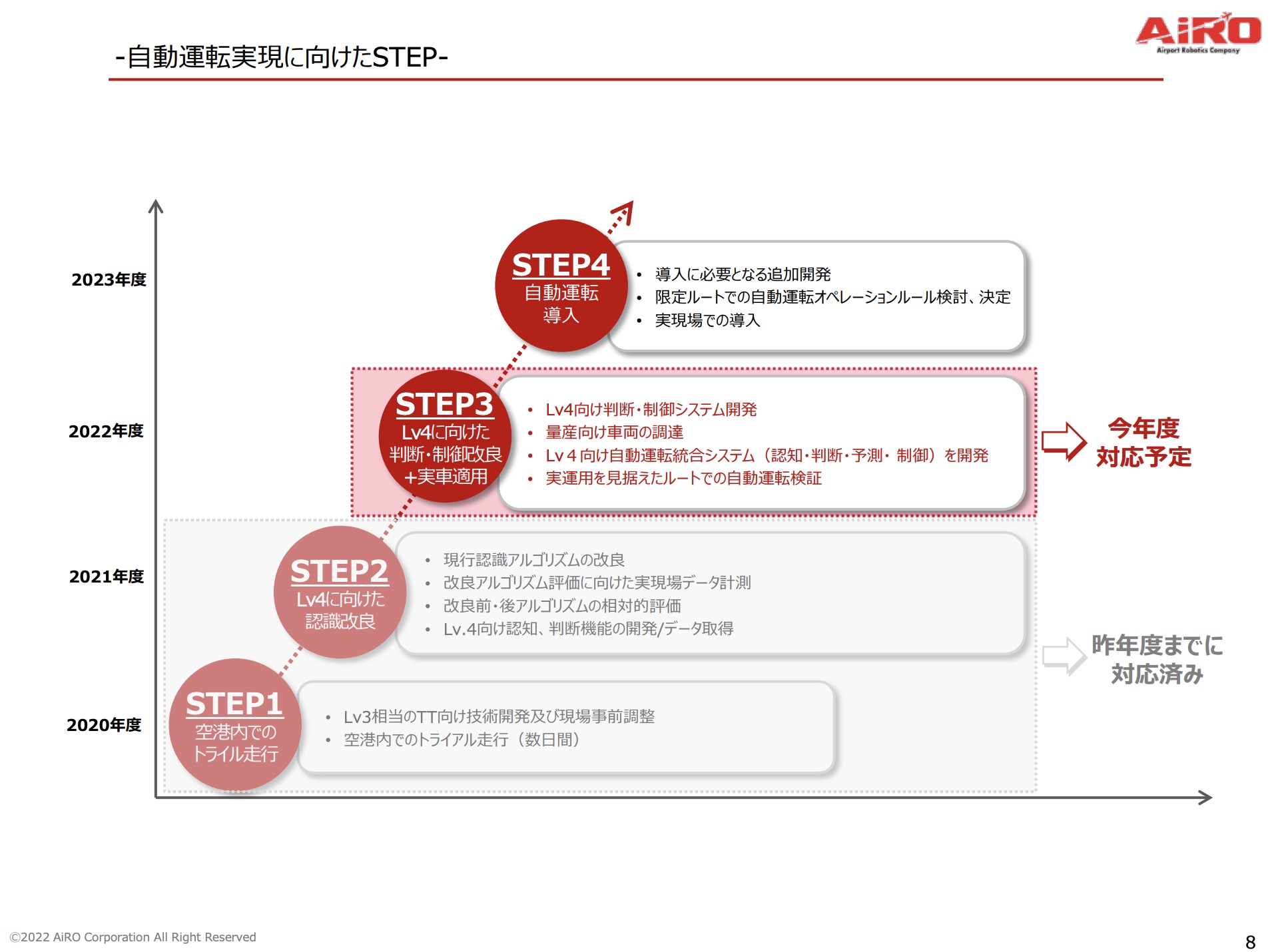
AiROはZMP製CarriRo Tractor 25Tを使用し、2023年3月ごろから羽田空港で中・長期間に渡って課題のピックアップ・各種データの取得を進めていく計画だ。
車両は、電動トーイングトラクターをベースに刷新を図った新モデルで、リチウム電池駆動で約200キロメートル走行可能という。自動運転コンピューター「IZAC」やLiDAR3台、遠隔監視用の単眼カメラ2台、GNSS、IMUなどの各種センサーを搭載している。

インフラに依存しない車両自律型の自動運転で、GNSS、LiDAR、IMUなどの複数センサーによって自己位置推定を行う。安全装置として、自動運転から手動走行に切り替えるオーバーライド機能や緊急停止ボタンも設置している。
走行ルートは、片道2キロメートルの東西貨物搬送と片道3キロメートルほどの内際手荷物搬送、片道4キロメートルほどの内際貨物搬送を予定しており、セーフティドライバーが同乗するレベル3相当で実証を行う。
▼資料
https://www.mlit.go.jp/koku/content/001517818.pdf
■今後の課題整理
これまでの実証では、主に参加者が各車両の技術確認を行うことに主眼を置いてきたが、レベル4実現に向けてはインフラや運用ルールの整備が必要で、それらは国が主導して取り組んでいく必要がある。
ハードウェア故障時の緊急対応など公道と共通する課題をはじめ、航空機の走行やブラストへの対応や通路への進入時の錯綜回避、車線減少部での合流判断、交差点での発進・停止判断など、空港独自の課題や運用ルールの必要性が浮き彫りとなった。
空港制限区域内の交差点では、これまでドライバー同士のアイコンタクトなどで意思疎通を図っていたが、今後交通整理のルールとルールに従って通行するための指示を行う信号などのインフラ整備について検討を進めていく方針だ。
空港内における自動運転の運用セーフティルール策定に向けては、以下の方針を案として掲げている。
- 道路交通法により使用されている用語については、空港でも可能な限り使用し共通化を図る。
- 道路交通法で定められた遠隔監視に関連した規則は、可能な限り空港内のルールにおいて準用する。
- 空港内におけるレベル4運行においては遠隔監視体制を必須とする。
- 道路交通法における特定自動運行計画の許可については、空港内においては適格性審査として空港管理者が行う。
- 車両性能に応じて追加的に必要となる運用テクニカルルールについては、適格性審査及びODD審査の一部として空港管理者が許可した後、追加的に設けたルールを含め必要な周知を空港内関係者に対して行う。
- 適格性審査の審査項目の詳細については、道路交通法などの各法令及び「空港内における自動運転L4相当実証実験実施要領」、模擬フィールド試験のチェックリストなどを参考に作成し、ガイダンスの中に含める。
- 将来の模擬フィールド試験による車両の安全性確認の扱いは、今後の車両保安基準などの改正状況や技術動向を踏まえて検討する。
■【まとめ】2025年目標にレベル4実証を継続
空港制限区域内は自動運転の実用化に向いていると思われがちだが、実はそうではないようだ。絶対的な安全確保とは裏腹に交通インフラは必要最低限のものしか設置されておらず、道路交通法が適用されないため交通ルールを明確化する必要があるようだ。
国土交通省は、トーイングトラクター、ランプバスともに2025年を目標にレベル4の試験運用・導入を図る計画を掲げている。引き続き進められるレベル4実証の動向に注目したい。
※自動運転ラボの資料解説記事は「タグ:資料解説|自動運転ラボ」でまとめて発信しています。
【参考】関連記事としては「自動運転と空港」も参照。


とは?日本やアメリカ・中国の状況は?")




の意味・定義・読み方は?自動車業界の新潮流を示す")
ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

