

国内で実用化が加速する自動運転バス。2025年末時点で11カ所がレベル4認可を受け、このうち9カ所で自動運転サービスに必要となる特定自動運行許可も出されている。
実質レベル2状態ながら通年運行や長期実証に臨むエリアも数十カ所に及び、2026年以降はレベル4が倍増していくかもしれない。
一方、事故などの件数増加も懸念されるところだ。2024年以降、何らかの接触を伴う事故・事案が13件確認された。詳しく解説する。
記事の目次
- ■自動運転バスの事故概要
- 沖縄県多良間村(2026年1月):技術検証中に街路樹に衝突
- 埼玉県深谷市(2026年1月):駐車車両を回避する際に縁石に接触
- 東京都八王子市(2025年8月):急旋回で街路樹に衝突 乗客3人負傷
- 大阪・関西万博(2025年7月):営業運行中に縁石に接触
- 大阪・関西万博(2025年4月):停車時にコンクリート壁に接触
- 熊本県熊本市(2025年1月):自動運転バスがもらい事故
- 岐阜県中津川市(2024年10月):対向車のドアミラーと接触
- 新潟県弥彦村(2024年6月/8月):電柱支線や縁石に接触する事案が発生
- 東京都江東区有明(2024年5月):車体側面が車止めに接触
- 千葉県横芝光町(2024年3月):手動運転時に踏切遮断機に接触
- 愛知県常滑市(2024年1月):道路中央のラバーポールに接触
- 茨城県境町(2024年1月):バックしてきたクルマが自動運転バスの側面に衝突
- ■【まとめ】整然とした情報公開と冷静な受け止めを
| 編集部おすすめサービス<PR> | |
| 自動車保険 スクエアbang!(一括見積もり) 「最も安い」自動車保険を選べる!見直すなら今! |  |
| 新車定額!リースナブル(車のカーリース) お好きな車が月1万円台!頭金・初期費用なし! | |
| 車業界への転職はパソナで!(転職エージェント) 転職後の平均年収837〜1,015万円!今すぐ無料登録を | |
| タクシーアプリは「DiDi」(配車アプリ) クーポン超充実!「無料」のチャンスも! | |
| 編集部おすすめサービス<PR> | |
| スクエアbang! |  |
| 「最も安い」自動車保険を提案! | |
| リースナブル | |
| 新車が月々2万円から! | |
| パソナキャリア | |
| 転職後の平均年収837〜1,015万円 | |
| タクシーアプリDiDi | |
| クーポンが充実!「乗車無料」チャンス | |
■自動運転バスの事故概要
沖縄県多良間村(2026年1月):技術検証中に街路樹に衝突

沖縄県多良間村で2026年1月15日、県が実施している自動運転バス実証でバスが歩道に乗り上げ街路樹に衝突して停止する事故が発生した。
乗客を運送する定期運行の終了後、乗客を乗せない状態で技術検証を行った際、多良間空港から北に400メートル程度走行したところで歩道に乗り上げる接触事故が発生した。
快適性向上のための技術検証で、自動運転機能の障害物検知システムをオフにして自動運転(レベル2)で時速20キロで走行中、車両の挙動が不安定となり、歩道に乗り上げた。けが人はいない。
受託事業者のEV モーターズ・ジャパンによると、指示速度時速5キロから 20 キロへの加速区間において、ステアリングが左右に振れる挙動が2度発生して左側路側帯へ乗り上げ、街路樹へ衝突して停止したという。
原因の早期特定及び再発防止策を策定し、確定次第速やかに公表するとしている。
▼事故発生リリース
https://www.pref.okinawa.lg.jp/machizukuri/dorokotsu/1012558/1037879.html
埼玉県深谷市(2026年1月):駐車車両を回避する際に縁石に接触

埼玉県深谷市で実証運行中の東部実証運行便の自動運転バスが2026年1月8日、縁石に接触する事案が発生した。
レベル2で走行中、深谷赤十字病院進入時の左折で前方に駐車中の救急車があり、これを回避する際にバス車両前方右下部が縁石に接触した。バスには運転手含め7人が乗車していたが、けが人は出ていない。
検証した結果、地図・経路設定、システム仕様、運行管理の各要因が複合的に作用して発生したことが判明した。
同所はハンドル最大操舵角に近い操作を要する高難易度な走行経路で、救急車回避に伴う経路の変更によってハンドル操作能力の限界を超える走行経路になった。また、走行可能エリアを越えた際に車両が自動停止する機能が備わっているが、過度な作動による快適性の低下を防ぐため無効化していたという。
加えて、手動運行への切り替えについてのルールや判断基準の文書化がなされておらず、運転手個人で判断していたため、手動運行への切り替えが遅れたとしている。
自動運転バスは、ティアフォー製の自動運転EVバス「Minibus v2.0」のようだ。
東京都八王子市(2025年8月):急旋回で街路樹に衝突 乗客3人負傷
東京都の事業で八王子市内を運行中の自動運転バスが2025年8月29日、急旋回して街路樹に衝突する事故が発生した。乗客3人が軽傷を負った。
高尾駅北口のバス停を出発し、国道20号をレベル2で時速20キロほどで走行中、急に左側に車両が旋回し、時速10キロ程度で街路樹に衝突した。
調査の結果、自動運転システムの制御機能において、本来使用すべきではない古い目標位置情報を誤って読み込む設計上の不備が判明した。これにより、車両が古い目標位置を参照して急ハンドルし、街路樹に衝突した。制御機能から独立した衝突回避機能がなかった点も指摘されている。
改善策として、車両制御機能の情報に時刻を付けて管理することで、データの常時照合を可能にして誤使用を防止したほか、システムが指示する急ハンドルの動作の角度や回転速度に上限を設けるなどの仕組みの導入、既存制御機能にタイヤの向きを考慮するなどの改良を加え、新たに独立した衝突回避システムを導入した。
事業の委 託 先は日本工営で、BOLDLYと西東京バスが再委託先となっている。使用車両はアルファバスジャパンの小型EVバス「E-City L6」で、自動運転システムの開発先は不明だ。

▼東京都発表の資料はこちら
https://www.metro.tokyo.lg.jp/documents/d/tosei/20251110_04_01
【参考】関連記事「八王子で事故の自動運転バス、「中国製」って本当?」も参照。
大阪・関西万博(2025年7月):営業運行中に縁石に接触
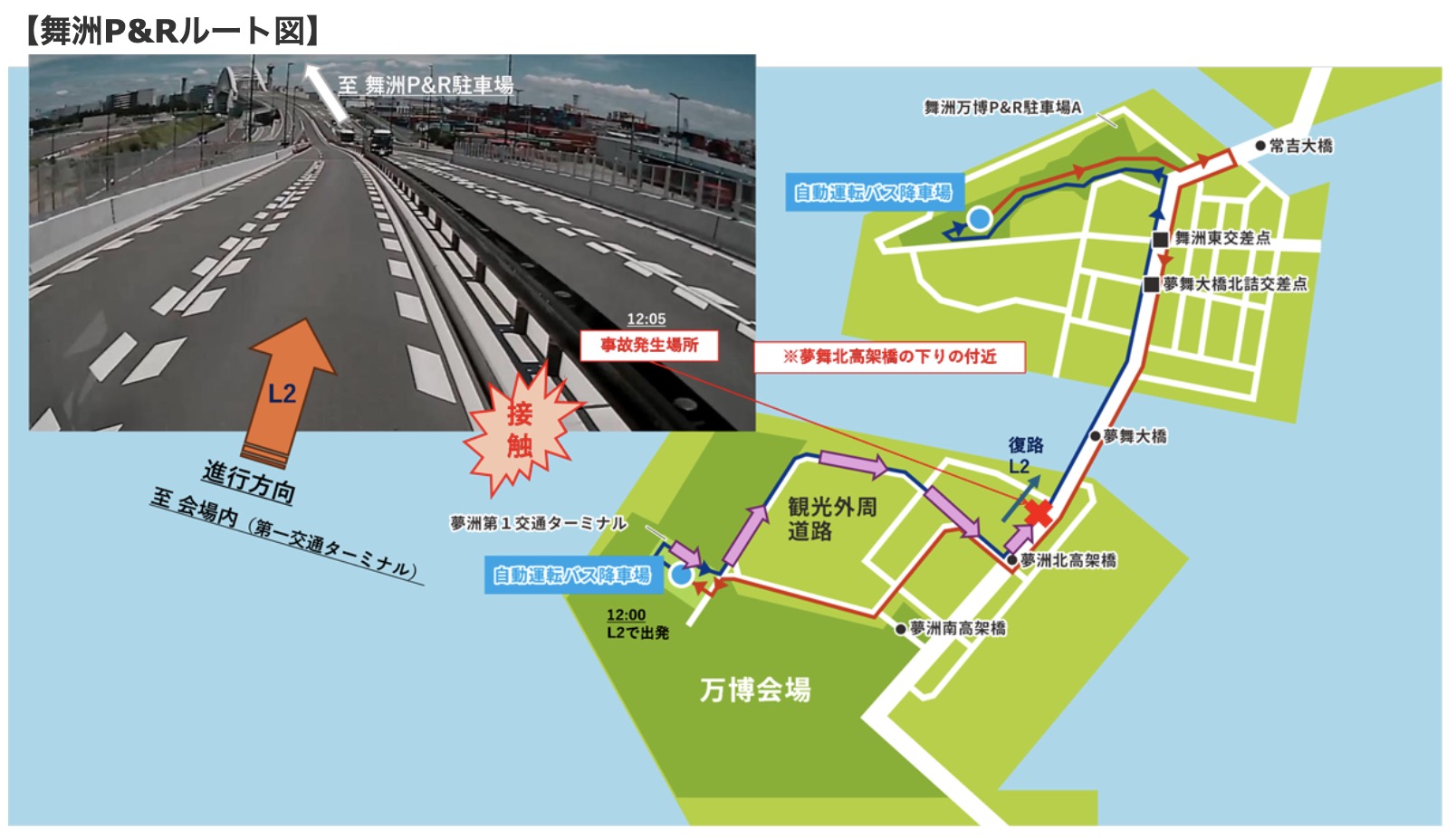
大阪・関西万博で運行中の自動運転バスが7月21日、走行中に縁石に接触する事案が発生した。万博会場から万博舞洲P&R駐車場に向けレベル2で営業運行中、右前輪の側面が中央帯縁石に3メートル接触した。乗客にけがはなかった。
事故発生場所付近は3Dマップが切り替わる位置(次のファイルを読み込む位置)で、LiDARから認識した情報と3Dマップをマッチング処理する際、CPUが過負荷となり3Dマップの読み込みが遅れた結果、車両位置の更新が適切にできず、マップマッチングの精度が低下したという。
これに伴い自動運転システムは代替自己位置推定手法となるRTK-GNSSに自動で切り替わり走行を継続し、事故発生前に再度マップマッチングに復帰したが、マップマッチングによる自己位置推定は車線の左に寄っていると誤認識した。ずれが生じたようだ。
そのため、車両は車線中央付近にあったにもかかわらず、自動運転システムが車線中央に自己位置を戻そうと右にステアリングを切ったため、縁石に接触したという。
▼事故関連発表はこちら
https://subway.osakametro.co.jp/news/news_release/20250828_banpakupandr.php
大阪・関西万博(2025年4月):停車時にコンクリート壁に接触
大阪・関西万博の来場者輸送を担う自動運転バスが2025年4月28日、待機場所での停車時にコンクリート壁へ接触する事案が発生した。
手動運転で回送中、停車時に車両が動き出し、高さ50センチのコンクリート擁壁に接触した。乗車していたドライバーにけがはなかった。
自動運転システムが車両からのエラーを検知した際、車両に対しリセット処理を行うようプログラムされていたが、処理する際の通信速度設定に誤りがあり、車両側とは異なる通信速度に切り替わっていた。そのため、車両側ではリセット処理を認識できず、自動運転システムは処理が完了しないことからリセット処理を繰り返す中で 大量のエラーデータが発生し、車両内のネットワーク通信を阻害した結果、パーキングブレーキが作動しなかったという。
車両はEVモーターズ・ジャパン製で、自動運転システムは先進モビリティが手掛けている。
▼事故関連資料はこちら
https://evm-j.com/wp-content/uploads/2025/06/a993246575c4ce8212935a3eb2eee65d.pdf
熊本県熊本市(2025年1月):自動運転バスがもらい事故
熊本県熊本市で試験走行中の自動運転バスが2025年1月30日、路線バスに追突される事故が発生した。いわゆるもらい事故だ。
一般運行に向けレベル2で試験走行中、交差点を左折する際に歩道をはみ出ていた歩行者を検知し、安全のために減速して停車したところ、後方を走行していた路線バスが接触した。自動運転バスのシステムに異常は見られず、けが人も出ていない。
なお、車両はティアフォー製Minibus 2.0で、BOLDLYが運行管理を行っていた。
▼事故関連資料はこちら
https://www.city.kumamoto.jp/kiji00362652/3_62652_439829_up_ngwiiewg.pdf
岐阜県中津川市(2024年10月):対向車のドアミラーと接触
岐阜県中津川市で実証中の自動運転バスが2024年10月10日、走行中に対向車のドアミラーに接触する事故が発生した。
自動運転バスが南進中、北進中の対向車とドアミラー同士が接触したという。ゆるやかなカーブにおける自動走行経路において、車両のセッティングの課題により、予定経路よりやや右寄りの位置を走行した結果、予定経路内での衝突判定領域の逸脱が発生した。また、セーフティードライバーの介入が遅れたことも確認されている。
車両挙動の見直し及び衝突判定領域の拡張などの対策、閉鎖空間内での実車検証を経た上で再セッティングし、約2週間後に実証を再開している。
車両はティアフォーの自動運転システムを搭載したGMS8で、アイサンテクノロジーが運行を担っていたようだ。
▼事故関連資料はこちら
https://www.aisantec.co.jp/ir/information/zm20241017.pdf
新潟県弥彦村(2024年6月/8月):電柱支線や縁石に接触する事案が発生
新潟県弥彦村で2024年6月11日、走行中の自動運転バスが電柱の支線に接触する事案が発生した。路上停車している車両を避けるため手動に切り替えて操作したところ、操作ミスによって事故を起こしたという。乗客はいなかった。
8月20日には、同村が運行する自動運転バスが、燕市吉田文京町の市道で縁石に乗り上げる事案も発生している。乗客4人にけがはなかった。
公式発表が見当たらないが、村の説明によれば、事故直前に自動運転機能が解除されていた。乗車中のオペレーターがタブレット型の操作用端末に誤って触れてしまったという。
運行管理はBOLDLYが行っており、車両はAuve Tech製「MiCa」を使用している。
東京都江東区有明(2024年5月):車体側面が車止めに接触
臨海副都心で実証中の自動運転バスが2024年5月22日、車体側面が車止めに接触する事案が発生した。乗客にけがはなかった。
臨海副都心のシンボルプロムナード公園内において走行実証中、バスの走行ルート上に障害物が検知されたため搭乗員による手動運転を行っていた際、公園と公道が交差する区間で右折しようとしたところ車体側面を車止めに接触させてしまったという。
搭乗員による目視の確認不足を要因としている。搭乗員向けの安全講習会を開催し、車両の特性を踏まえた安全運転の知識の定着・拡充を図るとともに、車両点検を実施して安全対策をより強化したとしている。
車両はAuve Tech製「MiCa」で、BOLDLYとWILLERがプロジェクトを実施していた。
▼事故関連資料はこちら
https://www.willer.co.jp/pdf/240528-notice.pdf
千葉県横芝光町(2024年3月):手動運転時に踏切遮断機に接触
千葉県横芝光町で実証中の自動運転バスが2024年3月7日、JR横芝駅近くの踏切の遮断機と接触する事案が発生した。事故当時は手動運転中だったとしている。
事故当時、踏切から約100メートル手前の道路で対向車線の大型車両を回避するため手動運転に切り替え、そのまま踏切に差し掛かったという。踏切手前の一時停止線で停止しなければならないところ、ドライバーは左右の安全を確認しながら徐行し、遮断機の警報音が鳴った時点で停車したという。この停止場所が一時停止線を超えていたため、車両の前方と遮断機が接触したようだ。
なお、車両はティアフォー製Minibusで、BOLDLYが運行管理を担っていた。
【参考】関連記事「自動運転バスの事故、原因は「人間」 千葉県横芝光町で踏切遮断機と接触」も参照。
愛知県常滑市(2024年1月):道路中央のラバーポールに接触
愛知県常滑市で走行中の自動運転バスが2024年1月17日、道路上にあるラバーポールに接触する事案が発生した。けが人はいない。
自動運転バスがレベル2状態でりんくう常滑駅に向かって南進中、道路中央にあるラバーポールに接触した。事故発生前にドライバーが手動運転に切り替えたものの、接触に至ったという。
走行ルート上における自動運転バス内のシステム全体のセッティングに課題があったことが判明している。
▼事故関連資料はこちら
https://www.aisantec.co.jp/ir/information/zm20240202.pdf
茨城県境町(2024年1月):バックしてきたクルマが自動運転バスの側面に衝突
ソースが見当たらないが、自動運転ラボによると茨城県境町で2024年1月7日、乗用車と自動運転バスが衝突する事故が発生したという。
道路沿いの施設からバックしてきた乗用車が走行中の自動運転バスの左側面に衝突したそうで、もらい事故に分類できるものと思われる。
■【まとめ】整然とした情報公開と冷静な受け止めを
13件中、もらい事故やヒューマンエラーの類は6件で、システム・コンピュータに何らかの要因があったものは7件だった。この7件も、軽微な事故・事案が大半で、けが人が発生したのは1件に留まったようだ。
誤解のないように、当サイトには自動運転車の事故を叩く意図はない。事故・事案は実用化の過程で多かれ少なかれ発生するものであり、これらがしっかりと改善されることが何より重要だからだ。未然防止が理想であることは言うまでもないが、同じミスの繰り返しや余程杜撰なものでなければ、目くじらを立てる必要はない。
おそらく、日本国内では今後自動運転絡みの事故・事案が増加する。社会受容性を高める意味でも、開発事業者や運行事業者は整然と情報公開し、受け手側も冷静に事実を飲み込むことが肝要となりそうだ。
【参考】関連記事としては「自動運転車の事故、日本・海外の事例まとめ」も参照。







の意味・読み方は?自動車業界の新潮流を示す")
ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

