

国土交通省が、海の次世代モビリティ活用促進に向けた取り組みを加速しているようだ。無人航行が可能な次世代モビリティの活用に向け、2020年度に「海における次世代モビリティに関する産学官協議会」を設置し、各モビリティの概要や技術開発動向などをまとめている。
協議会などにおける検討の過程で公開した資料「海の次世代モビリティの種類・特性・役割」によると、海の次世代モビリティには「無人水上機」や「無人潜水機」といった種類があるようだ。
同資料をもとに、無人航行可能な海の次世代無人モビリティの実像に迫っていこう。
▼海の次世代モビリティの種類・特性・役割
https://www.mlit.go.jp/sogoseisaku/SeaMobilityPF/pdf/mobility_basic1.pdf
記事の目次
■海洋無人機の分類
無人化や遠隔操作技術が大活躍
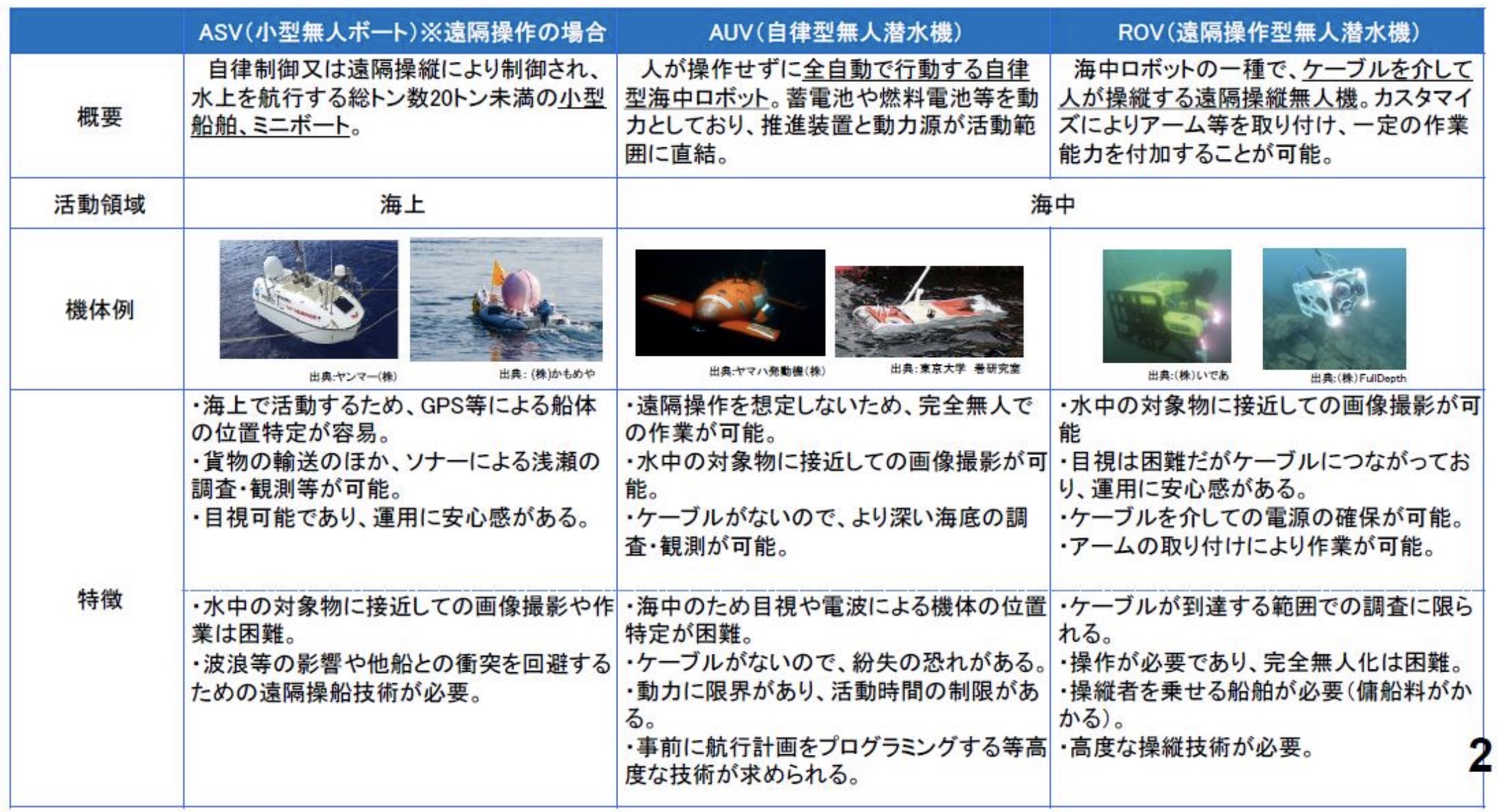
海洋を無人航行する次世代モビリティは「海洋無人機(UMV/Unmanned Maritime Vehicle)」に属する。この海洋無人機は、水面上を航行する「無人水上機(USV/Unmanned Surface Vehicle)」と、水中を潜航可能な「無人潜水機(UUV/Unmanned Underwater Vehicle)」に大別できる。
また、無人水上機と無人潜水機それぞれに、母船や基地局などから操作する「遠隔操作型」と、遠隔操作を必要としない「自律型(ASV)」があり、無人潜水機にはさらに母船にロープなどで引っ張られる「曳航型」がある。

資料では、この中の無人水上機、自律型無人潜水機、遠隔操作型無人潜水機に焦点を当て、それぞれの概要を説明している。以下、資料に沿って各次世代モビリティの中身を紹介していく。
■ASV(無人水上機)
位置特定しやすくあらゆる場面で活躍
ASVは本来自律航行可能な無人水上機を指すが、資料では遠隔操作も含め説明している。遠隔操縦または自律航行によって制御され、水上を航行する小型船舶を指すこととし、主として総トン数20トン未満の小型船舶やミニボートを対象としているようだ。
人による持ち運びが可能な小型モデルまでさまざまサイズの船が存在し、調査や観測、人や貨物の輸送など多用途で活用されている。
海上で活動するため、GPSなどの測位システムを利用した位置特定が容易で、目視可能なため運用に安心感がある。貨物輸送のほか、ソナーによる浅瀬の調査や観測なども可能という。
一方、水中の対象物に接近しての画像撮影や作業は困難で、波浪などの影響や他船との衝突を避けるための沿革操船技術が必要という。
活用方法としては、海洋調査や洋上中継器、物資輸送などが挙げられる。海上保安庁が保有する特殊搭載艇「マンボウII」は無人調査が可能で、西之島周辺の噴火警戒範囲内での海底調査に用いられたという。
また、日本原子力研究開発機構(JAEA)、海洋研究開発機構(JAMSTEC)、と国内企業らが、ファイバー型放射線検出器による海底表面の放射線測定や、音波測量機器による海底測量、海底土の採取装置による海底土コアサンプルの採取などが可能なASVの共同開発を進めている。
洋上中継器としては、深海調査や海底地形測量において、AUV(自律型無人潜水機)による海中データを地上に送信するための洋上中継機として用いられることがあり、SIPの「次世代海洋資源調査技術」や「革新的深海資源調査技術」においても開発が進められている。
物資輸送関連では、日本財団による「無人運航船の実証実験にかかる技術開発共同プログラム」において、水陸両用自動運転バスの開発や、横須賀市の三笠桟橋から猿島に至る約1.7キロの無人運航といった実証が行われている。
また、都市河川における水上交通ASVの開発など、人の運送や離島への貨物の無人輸送を目指した開発なども行われているという。
このほか、全長約3メートルでワンボックスカーにも搭載可能な小型ASVが国内において製品化されており、遠隔操縦に加えてあらかじめ設定した経路を航行する自律機能を有するものもある。
カメラによる水上警備や環境調査への利用をはじめ、マルチビームソナー搭載によるダムの深浅測量や、給餌ユニット搭載による生簀や養殖場での餌の自動散布といったオプション機能を追加することも可能という。
■AUV(自律型無人潜水機)
水中移動の自由度高い反面、データ伝送などに課題
AUVは、水中への潜航や水中の航行、水面への浮上までを自動で行う機能を有する無人潜水機を指す。水面からの潜航深度や水底からの高度など、周囲の状況を把握するためのセンサー類により、水底や水中障害物への接触を避けながら自律航行することができる。
潜航前にインプットしたプログラムに基づき、自律的に観測計画を遂行する。移動の自由度が高く、広範囲に渡る連続調査が可能なほか、海氷下など水面が閉鎖された場所での調査もできる。
一方、動力源の容量に依存するため航続距離が制限される点や、自動で動作するため遠隔操作型のような複雑な行動が不得意である点、外部との通信に伝送速度の遅い水中音響を用いるため収集したデータをリアルタイムで確認することが困難といった制約などがある。
AUVは、主に航行型AUV、ホバリング型AUV、水中グライダーに分類することができる。航行型AUVは魚雷型の形状で水中を安定巡航しながら観測を行うAUVで、海底から数10〜100メートル程度の高度を確保して運用されることが多い。海底地形の調査のほか、海底面や海底下の異常物把握、水質調査など、広範囲のマッピングが得意という。
ホバリング型AUVは、海底や海中に存在する物体への接近を前提として設計されたAUVで、垂直方向や横方向への移動のための推進器を備え、複雑な動きを可能にしている。海底などへの接近により、生物や水中構造物の光学画像撮影といった用途で活躍するほか、水中設備の保守・点検用途で水中構造物に触れて作業を行うことができる機体もあるという。
水中グライダーは、航行型AUVに類似しているがプロペラによる推進を行わず、浮力制御のみで航行を行う点で構造が異なる。主に水温や塩分濃度といった水質調査の用途に用いられるという。
■ROV(遠隔操作型無人潜水機)
仕様に応じたクラス分けも
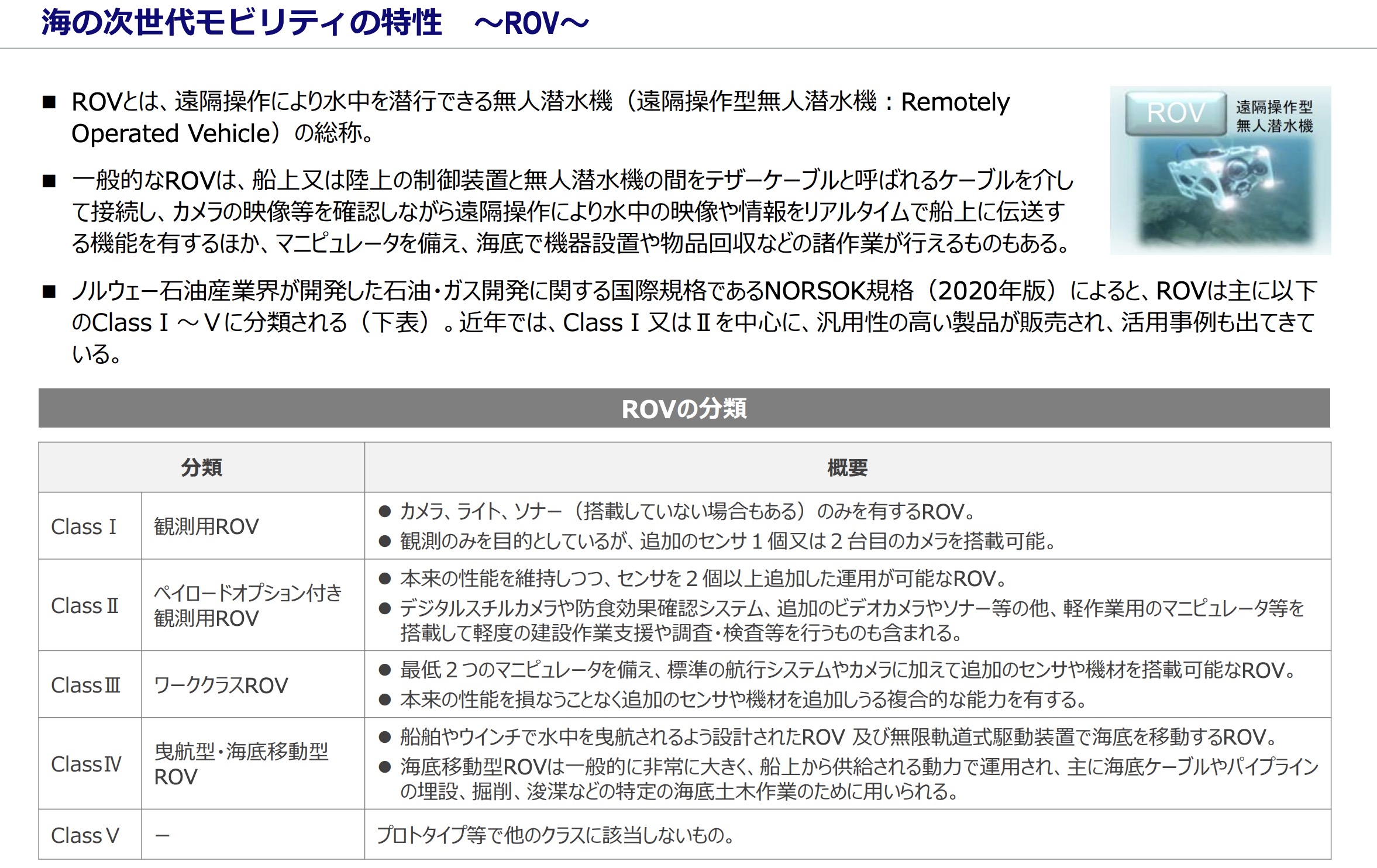
ROVは、遠隔操作によって水中を潜行できる無人潜水機を指す。一般的なROVは、船上や陸上の制御装置と無人潜水機の間をテザーケーブルを介して接続し、カメラ映像などを確認しながら遠隔操作によって水中映像や情報をリアルタイムで船上に伝送する機能を有するほか、マニピュレータで海底における機器設置や物品回収といった諸作業を行うものもある。
ノルウェー石油産業界が開発した石油・ガス開発に関する国際規格「NORSOK規格(2020年版)」によると、ROVはClass1〜5に分類できるようだ。
Class1は観測用ROVで、カメラやライト、ソナーのみを有する。Class2はセンサーを2個以上追加した運用が可能なペイロードオプション付き観測用ROV、Class3は最低2つのマニピュレータを備え、標準の航行システムやカメラに加え追加センサーや機材を搭載可能なワーククラスROV、Class4は船舶やウインチで水中を曳航されるよう設計され、無限軌道式駆動装置で海底を移動する曳航型・海底移動型ROV、Class5はプロトタイプなど他のクラスに該当しないものを指す。
近年は、Class1~2を中心に汎用性の高い製品が販売され、活用事例も出始めているという。
■海の次世代モビリティ利活用に向けた動向
実証続々、活用促進に向けた情報プラットフォームも
海の次世代モビリティ利活用に向けた実証も進められており、2021年度にはズワイガニ資源量推定におけるAUV活用(いであ)、真珠養殖業におけるROVを活用した海洋環境調査の有効性実証(NTTドコモ)、2022年度は自動運転船舶ロボットによる「アート&レストランロボット」の実用化実験(竹中工務店)、東京ベイエリアにおける分散型モビリティとしての「渡し舟ロボット」の活用実証実験事業(炎重工)など、さまざまな取り組みが行われている。
海の次世代モビリティ活用促進に資する情報提供や関係者らのマッチングを図る「海の次世代モビリティ 情報プラットフォーム」も立ち上げられている。
▼海の次世代モビリティ 情報プラットフォーム
https://www.mlit.go.jp/sogoseisaku/SeaMobilityPF/index.html
今後、開発面・サービス面でより多くのプレイヤーが参画し、海の次世代モビリティの可能性を大きく拡大していくことになりそうだ。
【参考】自動運転船舶ロボットの取り組みについては「自動運転で動く!船長いらずの「水上屋台」登場」も参照。
自動運転で動く!船長いらずの「水上屋台」登場 https://t.co/du4qYU4SRn @jidountenlab #自動運転 #水上屋台
— 自動運転ラボ (@jidountenlab) October 14, 2022
■【まとめ】サービス多様化に向け関係・参入する業界や企業が増加
沿岸・離島地域では、水産業やインフラ維持管理、海洋調査などさまざまな活動における担い手不足が深刻化しているという。こうした場面で、無人化技術を含む海の次世代モビリティの有効活用に大きな期待が寄せられているようだ。
今後、開発の深化とサービス多様化に向け、関係・参入する業界や企業が増加していくものと思われる。海の次世代モビリティがどのように進化し、どのように活用されていくのか、今後の動向に要注目だ。
※自動運転ラボの資料解説記事は「タグ:資料解説|自動運転ラボ」でまとめて発信しています。
【参考】関連記事としては「瀬戸内海と大阪、自動運転船で接続へ!エイトノットが資金調達」も参照。






の意味・定義・読み方は?自動車業界の新潮流を示す")
ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

