

自動車部品メーカーの日立オートモティブシステムズ株式会社(本社:東京都千代田区/最高経営責任者:ブリス・コッホ)は2019年10月17日までに、一般道における自動運転の実用化を見据え、システム側が指示した軌道に合わせて正確に追従走行が可能な制御技術を開発したと発表した。
同社は2018年12月にも自動運転の実現に向けた取り組みとして、制御システム上のソフトウェアを高速変更する技術を開発したと発表している。今回は日立オートモティブシステムズのこの2つの技術に焦点を当て、詳細を紹介していこう。
■システムの指示に合わせ正確な制御を可能に
今回発表した技術は、システムが指示した軌道に合わせて正確に車両を自動走行させるための技術だ。
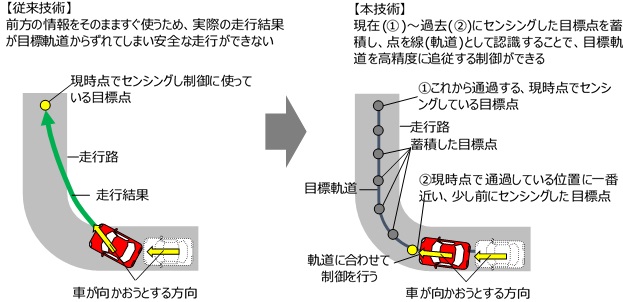
一般道や駐車場では、歩行者や落下物などをセンサーで検知し、その情報に基づいてシステム側は安全な走行をしようとする。その際、大きく車を旋回させることが必要になることもあるが、これまではシステム側が指示した軌道と車両の実際の軌道に大きなズレが生じることも少なくなかった。
その課題を克服したのが今回の技術で、同社は「前方のセンシング情報をそのまますぐに使うのではなく、ECU内に一旦蓄積してから使うことで過去から現在までの点を線(軌道)として認識し、目標となる軌道を高精度に追従できるようにしました」と説明している。
また車両の応答の遅れを補正することも可能になり、軌道追従の精度を一層高めることにもつながったという。
■システムを停止せずにソフトウェアの高速変更を可能に
日立オートモティブシステムズが2018年12月に発表した技術は、自動運転のシステム上のソフトウェアを高速変更できるようにするミドルウェア技術だ。この技術を活用することにより、走行中もシステムを停止せずに動作を継続することが可能になる。
自動運転実用化されたあと、システムを取り巻く環境は日々変化していく。そのため、こうした変化に合わせてシステム上のソフトウェアをアップデートしたり変更したりする必要が出てくる。システムに異常が発生したときも、ソフトウェアの修正などが求められることになる。
日立オートモティブシステムズは発表したミドルウェア技術はこうしたニーズに対応したもので、同社は「制御システムの機能を変更する場合には、バックアップ情報を用いて、入力情報の再生や、次の動作を決めるための計算値の上書き修正を高速に実施します」と説明している。
既に1/10スケールの実験車両で実験を行っていることも発表されており、異常発生後にソフトウェアを修正しても、安定した走行制御の継続が確認できたという。

■【まとめ】新技術の積み重ねで自動運転は実現
日立オートモティブシステムズ社は自動運転の開発に貢献する技術開発をはじめ、自動運転車両やコネクティッドカーの実用化に向けた機器やソリューションの開発と提供に取り組み、自動運転システムの普及拡大を目指すという。
自動運転は今回紹介したような新技術の積み重ねで初めて実現する。同社の新技術の発表には今後も注目だ。
【参考】関連記事としては「日立AMS、自動運転系スタートアップと関係強化 米VCのPlug and Playとパートナー契約」も参照。
日立AMS、自動運転系スタートアップと関係強化 米VCのPlug and Playとパートナー契約 https://t.co/L48tJoBuCB @jidountenlab #日立 #VC #自動運転
— 自動運転ラボ (@jidountenlab) August 1, 2019
とは?自動運転EV、価格・スペックは?")
とは?搭載する自動車の車種は?自動運転ではない?")
とロボタクシーを徹底解説")




の意味・読み方は?自動車業界の新潮流を示す")
ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

