

車道を走行する中型タイプの自動配送ロボットなどの実現に向けた動きに進展があった。経済産業省はこのほど、「より配送能力の高い自動配送ロボットの社会実装検討ワーキング・グループ(WG)」を立ち上げ、従来の小型の自動配送ロボットよりも大きな機体や速い速度で走行するロボットに関する議論に着手した。
議論では、ボディサイズや走行形態もさることながら、走行する速度にも焦点が当てられているところがポイントで、一つの目安として「最高時速20キロ」が挙げられている。
果たして時速20キロは妥当なのか。中型タイプは車道の左端を走行する可能性が高いが、遅過ぎれば安全性を高められる一方自動車が迷惑を被る可能性もある。しかし速過ぎれば安全性が損なわれる。
自動車や自転車など他の交通参加者との干渉は避けて通ることができず、ボディサイズや走行速度、走行形態には慎重な議論が必要となる。
WGではどのように論点を整理し、議論を進めていくのか。第1回目の会議の内容を紹介していく。
▼第1回 より配送能力の高い自動配送ロボットの社会実装検討ワーキング・グループ
https://www.meti.go.jp/shingikai/mono_info_service/delivery_robot/001.html
▼事務局資料
https://www.meti.go.jp/shingikai/mono_info_service/delivery_robot/pdf/001_04_00.pdf
記事の目次
■ワーキング・グループの概要
より配送能力の高い自動配送ロボット実現に向け議論に着手
モノの配送需要の急増とドライバー不足によって物流危機が叫ばれる中、ラストワンマイル配送においては物流DXの一つとして自動配送ロボットを活用した配送サービスの普及に期待が持たれている。
国内では現在、主に歩道を低速走行する小型の自動配送ロボット実用化に向けた取り組みが進められているが、海外では中速・中型や、中速・小型といった「より配送能力の高い自動配送ロボット」の実証やルール整備が進められているという。
そこで、日本でも「より配送能力の高い自動配送ロボット」の実現・社会実装に向け論点整理を進めるため「より配送能力の高い自動配送ロボットの社会実装検討ワーキング・グループ(WG)」を立ち上げた。
WGには有識者のほか、事業者としてウーブン・バイ・トヨタやNTTコミュニケーションズ、川崎重工、京セラコミュニケーションシステム、スマートインプリメント、ZMP、ゼンリン、ティアフォー、TIS、トヨタ自動車、Hakobot、パナソニックホールディングス、本田技術研究所、ヤマト運輸、楽天グループ、LOMBYが名を連ねている。
小型配送ロボットと軽自動車の中間の大きさを想定
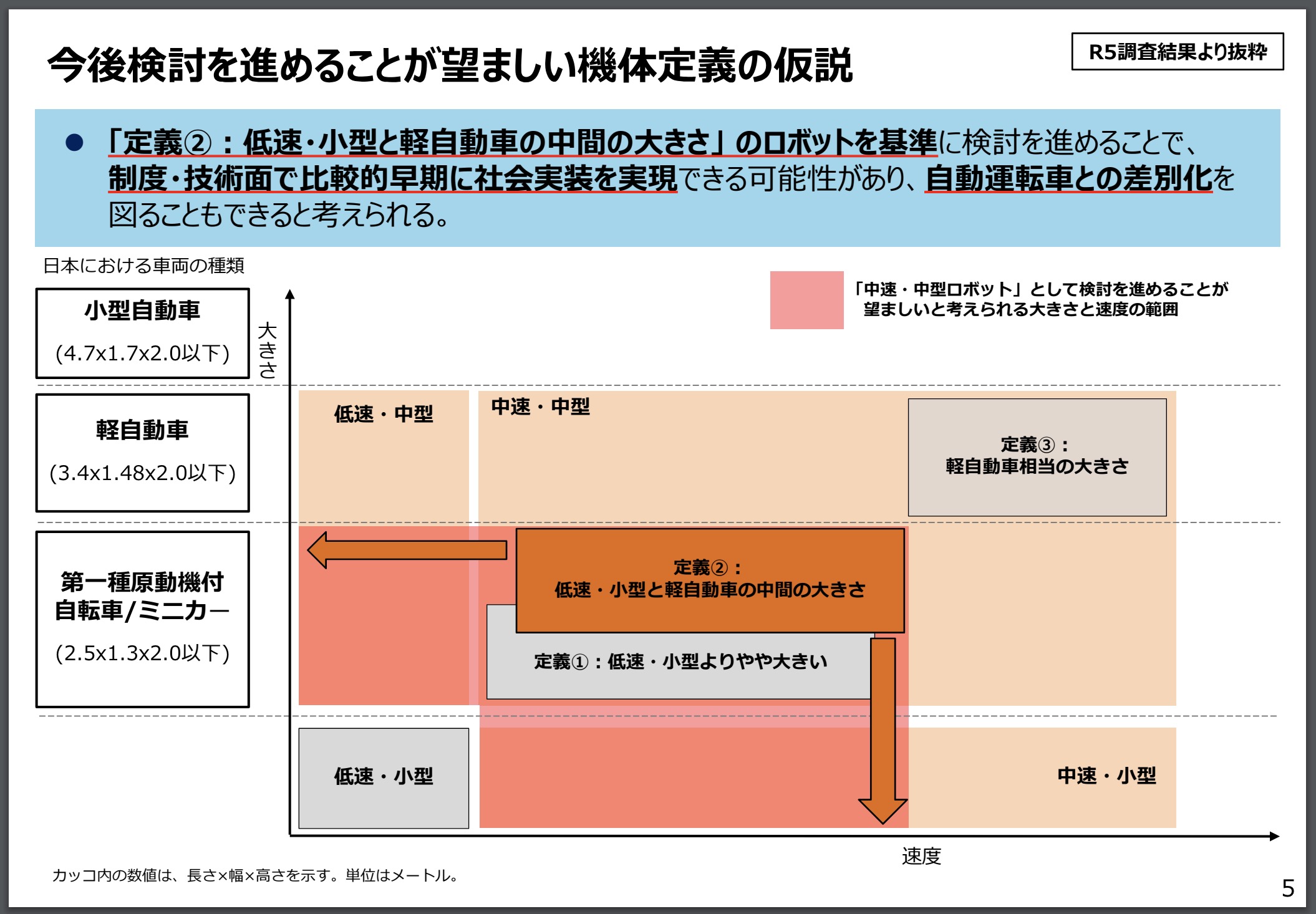
より配送能力の高い自動配送ロボットに明確な定義はないため、まずこれを定義付け・分類する必要がある。WGでは、叩き台として機体サイズの観点から以下の3つに分類している。
- ①低速・小型ロボットよりやや大きいモデル
- ②低速・小型と軽自動車の中間の大きさ
- ③軽自動車相当の大きさ

①は積載量が少ないものの保安基準のハードルが低く、時速20キロ程度までであれば安全確保しやすい可能性が高い。②は複数カ所を巡るユースケースにも耐えうる積載量があり、原付やミニカー相当であれば比較的保安基準のハードルが低く、時速20キロ程度までであれば安全確保しやすい可能性が高い。
③は十分な積載量を確保できる一方、自動車と同等程度の保安基準が求められ、時速40キロ程度の走行を想定すると高スペックなセンサーや複雑な運行管理システムが必要となる。
こうした点から、WGでは②の「低速・小型と軽自動車の中間の大きさ」 のロボットを基準に検討を進める方針としている。
ミニカー規格相当?
②は、イメージとしてはミニカー規格(長さ2.5×幅1.3×高さ2.0メートル)あたりだろうか。型式指定の超小型モビリティもこのサイズだ。
国内事業者からの意見としては、②を基準とした検討が望ましいという意見が多かったが、一部③を望む意見もあったという。中速・中型ロボットの特性を鑑み、自動車と比較し保安基準や最大積載量などを緩和したルール整備を望む意見があったとしている。
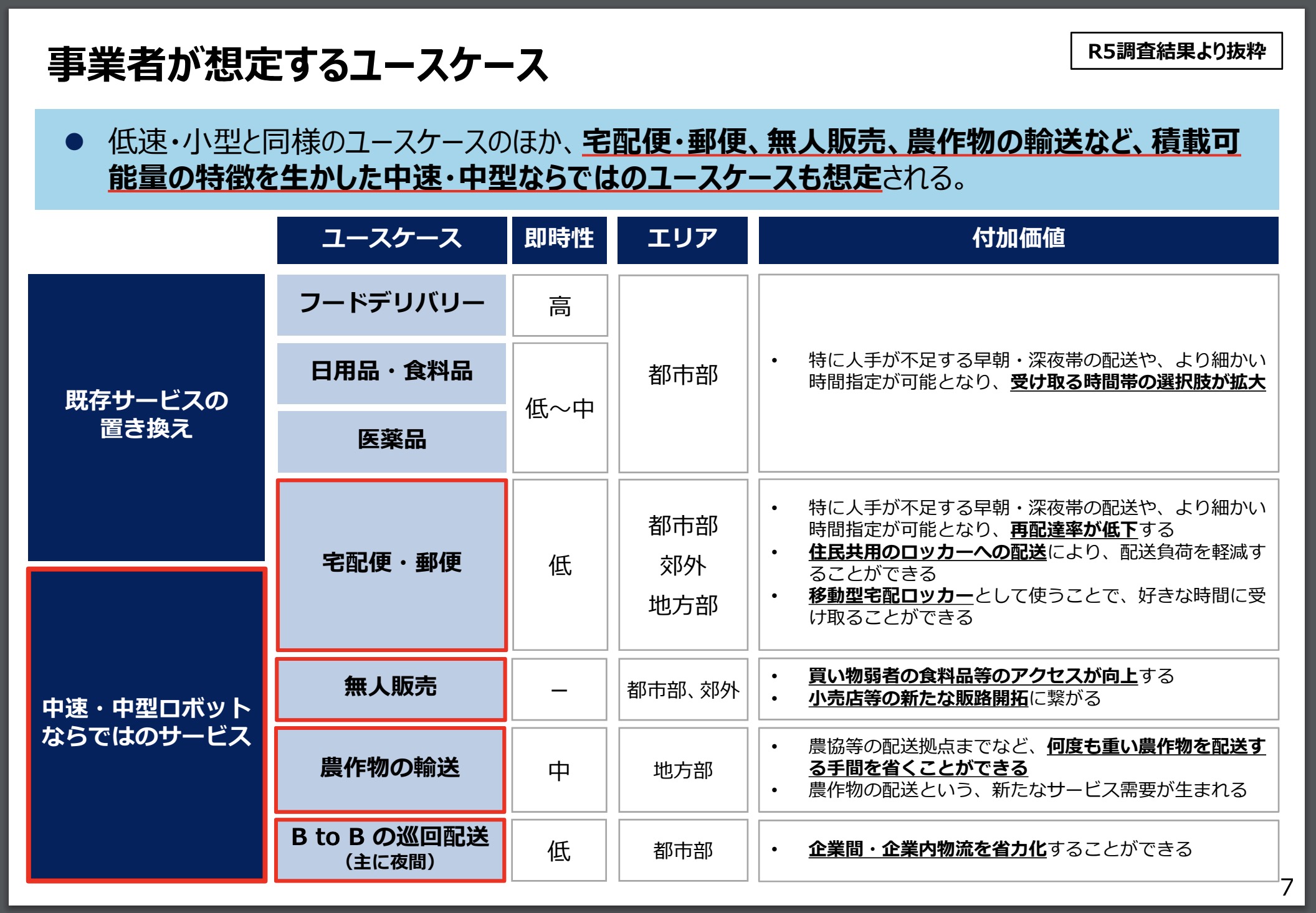
ユースケースとしては、既存の低速・小型と同様のフードデリバリーなどをはじめ、宅配便・郵便、無人販売、農作物の輸送など、積載可能量の特徴を生かした中速・中型ならではのサービスも想定されるという。
幅員の設定が重要
「低速・小型と軽自動車の中間の大きさ」、いわゆる「中型」の定義における素案としては、小型ロボット(1.2×0.7×1.2メートル)以上軽自動車未満(2.5×1.3×2.0メートル→ミニカー規格)とすることが考えられるとし、特に幅については、道路幅員との関係を考慮する必要があるとしている。
道路構造令で定められている車線の幅員(2.75~3.5メートル)に応じ、安全な追い越しやすれ違い、強引な追い越しの誘発リスクなどを考慮したうえで、望ましい機体の幅や通行場所と通行方法を検討する必要があるとしている。
例えば車線幅員3.5メートルの道路であれば、ロボットの幅員が1.3メートル以内であれば一般的な乗用車は車線をはみ出すことなく追い抜くことができる。しかい2.75メートルの道路の場合、追い抜くためにはセンターラインをはみ出さなければならない。
速度は時速20キロ未満とすることが考えられる。巡回型の無人販売など、時速6キロ程度の低速で走行する活用も考えられるが、これらは中速・中型の派生型とみなし、議論の対象外とする方針だ。
軽自動車以上の大きさについても、「特定自動運行を行う自動車」 の制度で物流用途のユースケースが今後実装される見込みがあるため、同WGでは対象外とすることが考えられるとしている。
他の交通主体との速度差も懸念事項に
速度に関しては、一般道の法定速度は時速60キロで、場所によって時速40キロなどの指定速度が設けられている。中速・中型ロボットが時速20キロ未満で走行する場合、通行場所や方法によっては他交通主体との大きな速度差が生じることから、強引な追い越しの誘発リスクや、渋滞などを考慮する必要がある。
また、中央線が無く道路幅員の狭い生活道路は、高速道路を除く公道の約7割に相当し、歩行者などの安全確保が優先される。こうしたエリアも中速・中型ロボットによる主な配送先として想定され、コンパクトな機体サイズを生かせる場面だが、安全面・運用面で留意が必要としている。
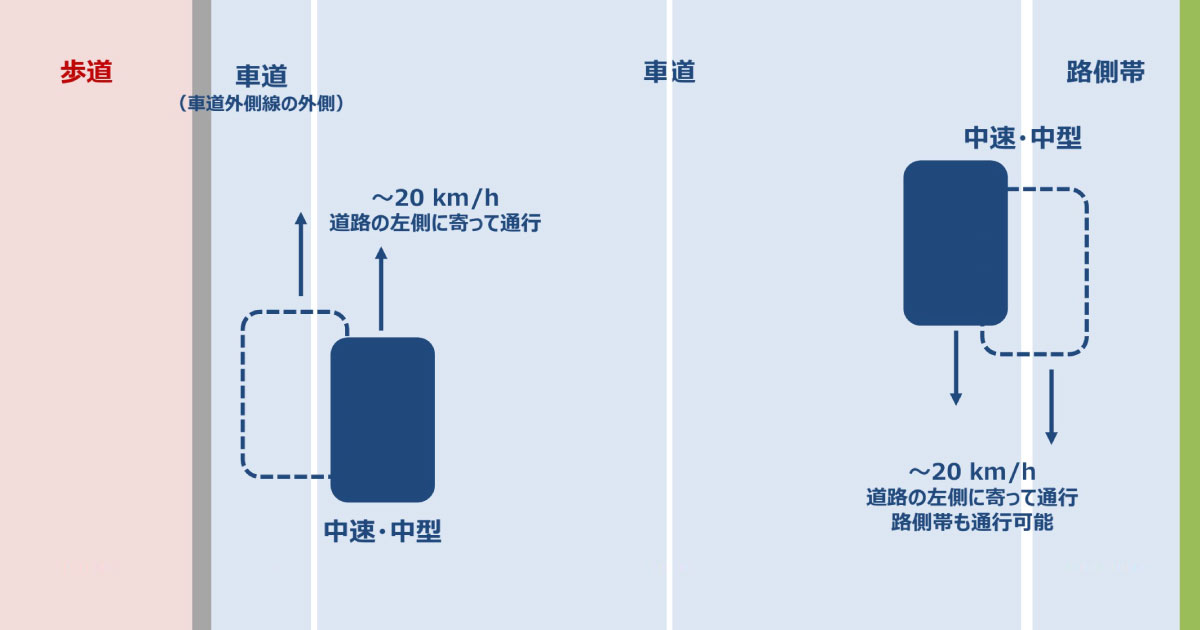
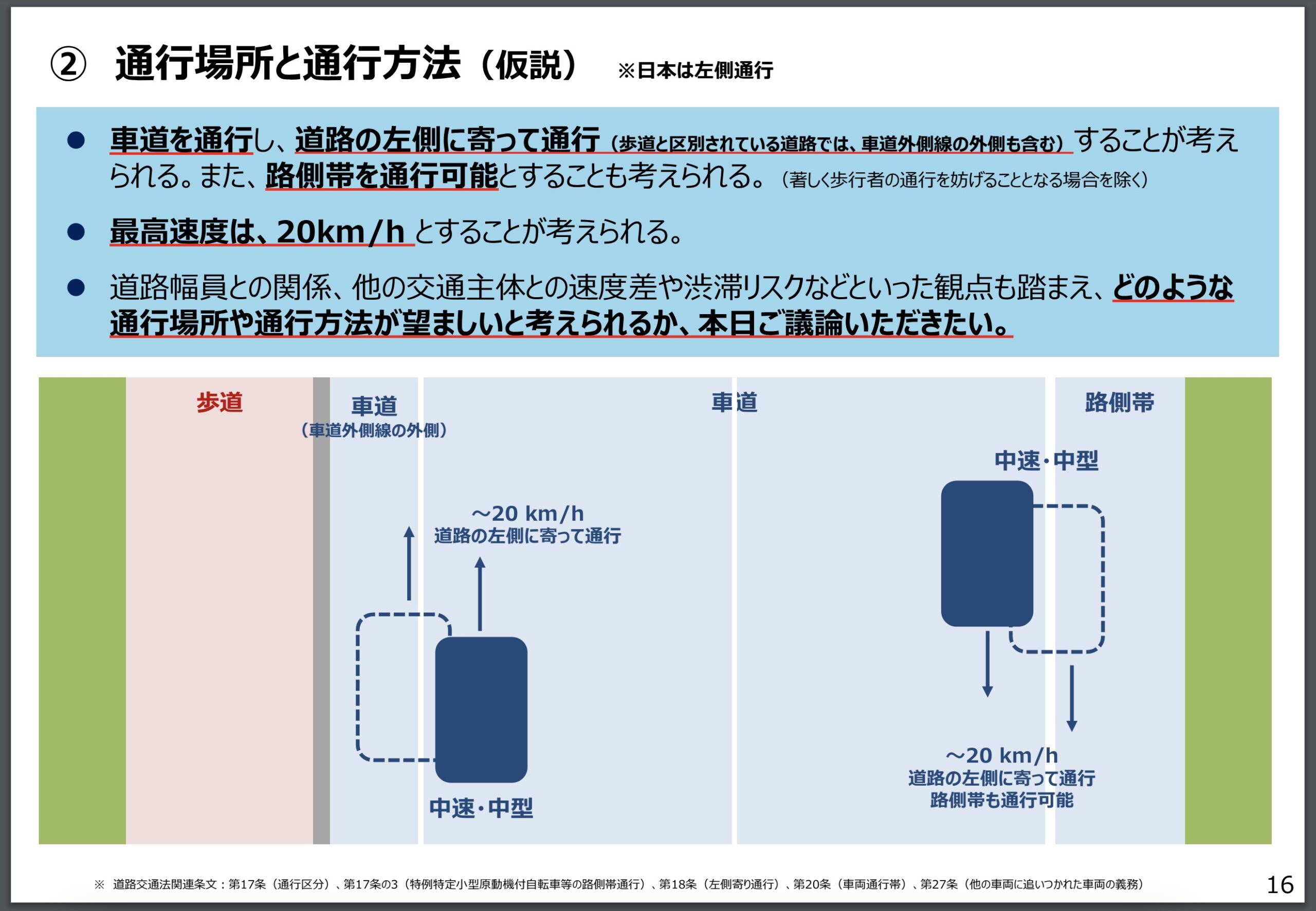
通行場所と通行方法については、車道を通行し、道路の左側に寄って通行することが考えられる。歩道と区別されている道路では車道外側線の外側も含み、ケースによっては歩行者の通行を著しく妨げない前提で路側帯を通行可能とすることも考えられるとしている。
こうした論点を踏まえ、最高速度は時速20キロを想定する。道路幅員との関係、他の交通主体との速度差や渋滞リスクなどの観点も踏まえる。
車両通行帯の設けられた道路では、第一車両通行帯を左側に寄りながら走行することが考えられる。右折時の 2段階右折 (特定小型原動機付自転車等と同様)や、多通行帯道路における右折時の 2段階右折(一般原動機付自転車と同様)が求められるかどうかについては、今後の実証も踏まえ、関係省庁を交えた検討が必要としている
2段階右折が求められる場合、通常は4輪以上の中速・中型ロボットにおいて技術的に対応可能かどうかや、求められない場合、または技術的に困難な場合においてどのような右折方法が考えられるかなど、議論を進めていく方針だ。
■海外の事例
カリフォルニア州では時速32〜40キロで走行可能
参考として、例えば米国では低速・小型相当のロボット(PDD)や低速車両(LSV)といった実証規定を含めた既存の枠組みにおいて走行が認められている。LSVは、連邦法により機体の安全基準などについて、各州法によって運用条件が規定されているという。
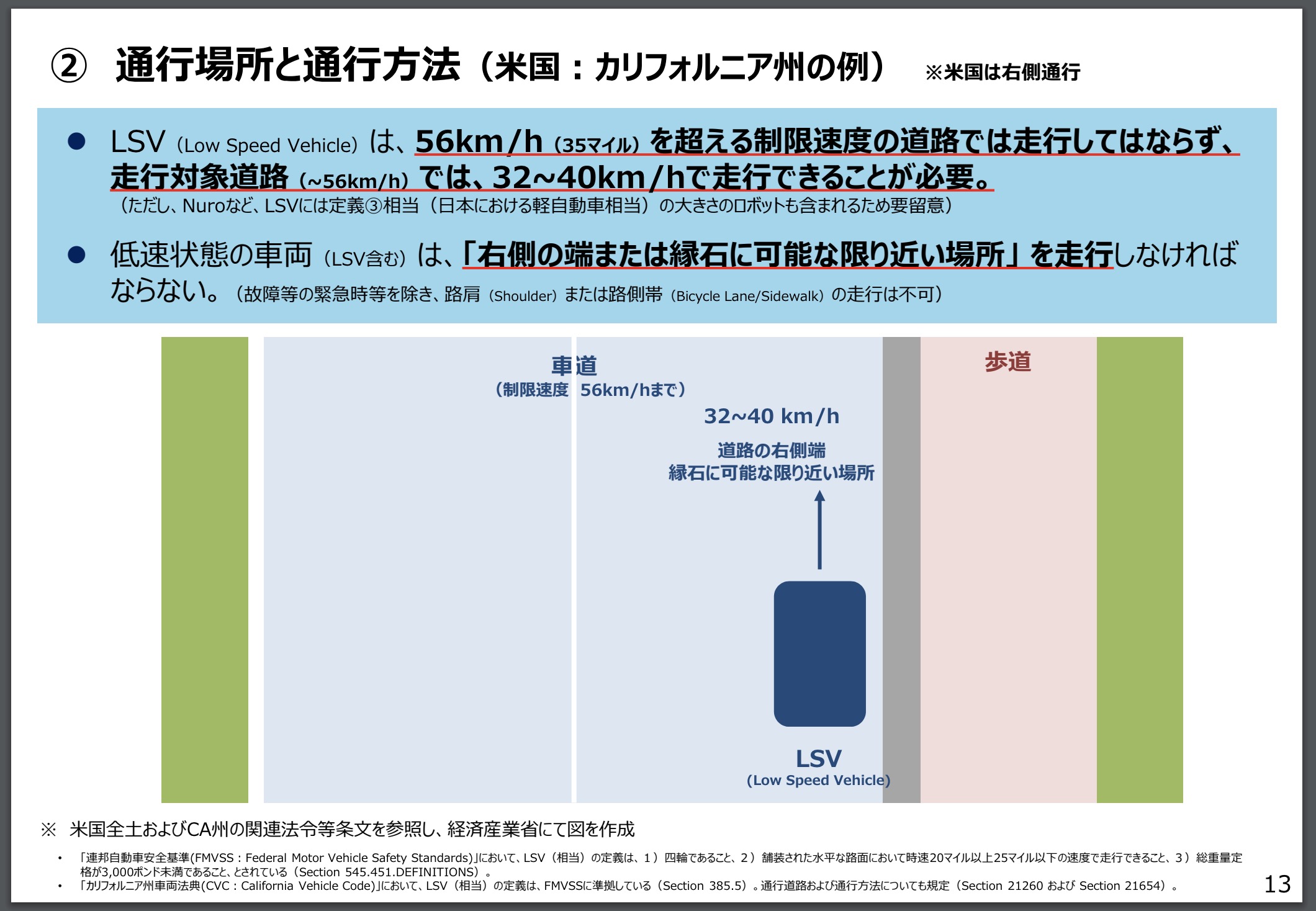
米カリフォルニア州の場合、LSVは35マイル(時速56キロ)超の制限速度が指定されている道路では走行してはならず、時速56キロまでの走行対象道路において時速32~40キロで走行できることが必要という。
なお、LSVには軽自動車相当のロボットも含まれる。LSVを含む低速状態の車両は、「右側の端または縁石に可能な限り近い場所」(米国では右側通行) を走行しなければならないという。
北京では時速15キロが上限
一方、中国では、配送ロボット固有の実証規定に関する枠組みが設けられ、走行が認められている。国が機体規格や走行ルールの大枠を規定し、地方政府が詳細な部分を規定しているという。
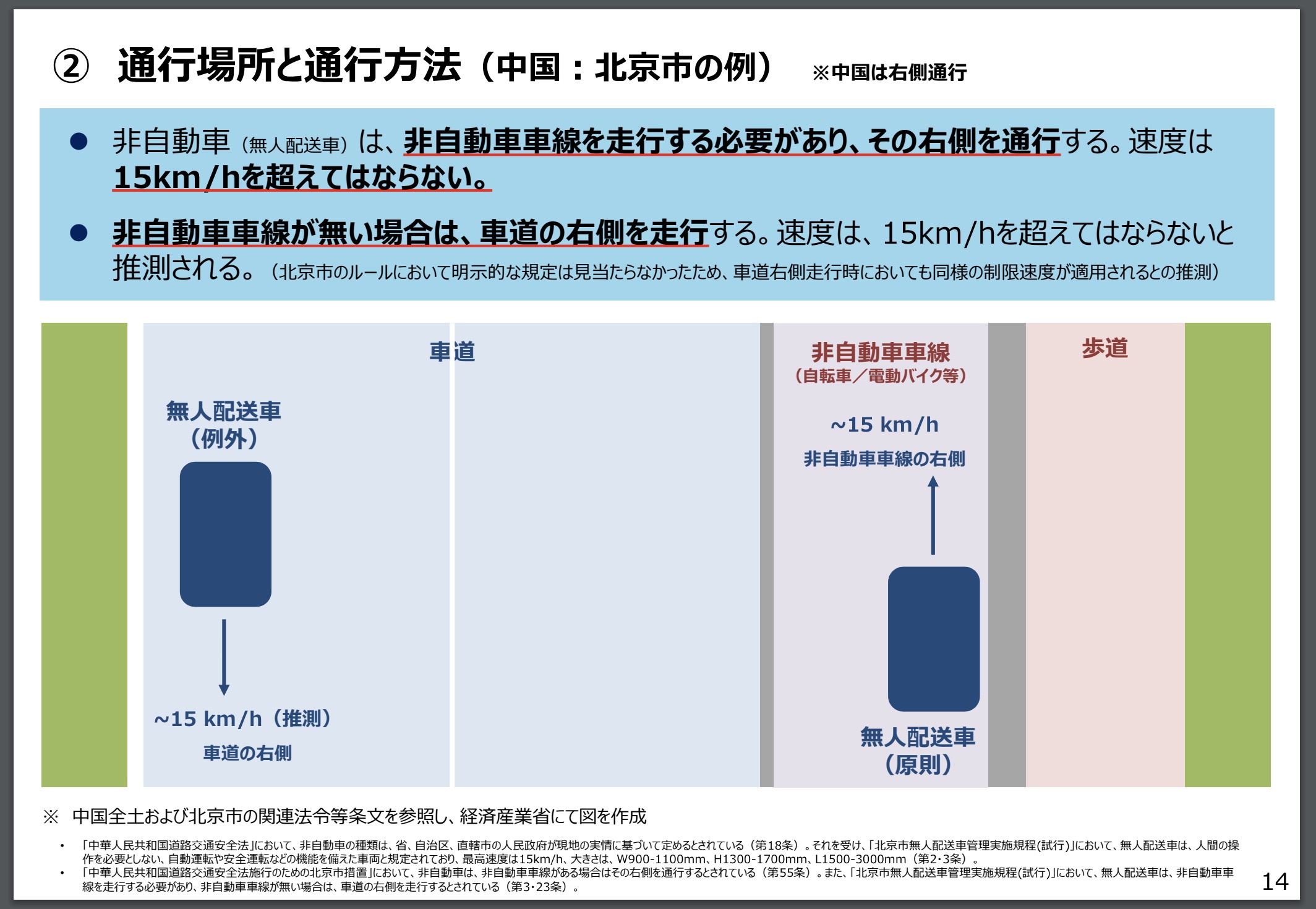
北京市では、非自動車(無人配送車)は「非自動車車線」を走行する必要があり、その右側を通行する。速度は時速15キロを超えてはならない。非自動車車線が無い道路では車道の右側を走行し、その際の速度は時速15キロを超えてはならないと推測されるという。
国内実証の例では、唯一中型・中速モデルに取り組んでいる京セラコミュニケーションシステムは、警察と事前相談のうえ道路交通法第77条に基づく道路使用許可により実施している。車道を走行し、道路の左側に寄って通行(車道外側線を跨ぐ場合あり)しているという。
【参考】京セラコミュニケーションシステムの取り組みについては「京セラが車道実証!自律走行の「配送ロボ軍団」編成に挑戦」も参照。
■運用方法:遠隔操作と自動運転を想定
運用方法に関しては、遠隔操作と自動運転を想定しているようだ。オペレーターによる遠隔操作を含む運行(遠隔操作型小型車や自動運転レベル3に相当)か、特定条件下においてシステムが全てのタスクを実施する自動運転レベル4相当か、どちらを目指すべき姿とすべきかといった点も論点になっているようだ。
諸外国においては、オペレーターによる遠隔操作の実施について規定されており、オペレーターの要件として、対応する車両の種類に応じた運転免許の保持などが必要という。
技術的難易度や社会実装のスピード感を踏まえ、どのような運用方法が望ましいかも議論を進めていく。
■2025年1月にとりまとめへ
今後、2025年1月後半をめどに議論のとりまとめを行う。中速・中型に関する議論を先行し、中速・小型については本年度中に追加調査を実施しながら議論を進める方針としている。
その後、年度末予定の「自動走行ロボットを活用した配送の実現に向けた官民協議会」の議事で関係省庁などに報告する。
■「エリア全体でのマネジメントが必要」
出席した委員からは、以下のような意見が出された。
- カーブサイドについて、第一走行帯は自動運転車両も当然議論をしているところ。空間を共有する協調の議論をしなくてはいけない。
- 低速、中速、高速というそれぞれの速度帯に応じたさまざまな交通が道路上を走っているが、例えば中速帯であれば自転車と共有しながら走ることになる。エリア全体でのマネジメントが必要になる。
- 想定されている機体の大きさ・速度では、車道を通行し、道路の左側を通行することが適切。
- 中速・中型ロボットが車道を走行する実証を行っており、住民からは特段クレームなどをいただくことはない。一方で、車を運転する方から苦言を言われることがあり、中型ロボットが 時速15キロほどで走行していると、運転者側から見てどうしていいか分からないことが多々ある。
- 中速・中型ロボットの場合、路上での荷捌き空間について議論が必要ではないか。
▼第1回 より配送能力の高い自動配送ロボットの社会実装検討WG 議事要旨
https://www.meti.go.jp/shingikai/mono_info_service/delivery_robot/pdf/001_gijiyoshi.pdf
■【まとめ】ラストマイル担う新たなモビリティの実用化に期待
中型・中速モデル実用化に向けた主な論点は、ボディサイズや走行速度、走行形態だ。どれほどのサイズのロボットがどこを時速何キロで走行するのか。
今のところ、ボディサイズはミニカー規格で、走行形態・速度は電動キックボードのようなイメージだろうか。その他、商品・荷物の積み下ろしスペースについてもしっかりと検討していかなければならない。
比較的大きなモノの輸送や中距離輸送、複数カ所への配送など、中型・中速モデル実用化に対する期待は高い。どのような結論に達するのか、今後の議論に要注目だ。
※自動運転ラボの資料解説記事は「タグ:資料解説|自動運転ラボ」でまとめて発信しています。
【参考】関連記事としては「自動運転とは?(2024年版)レベル別の開発状況・業界動向まとめ」も参照。







の意味・読み方は?自動車業界の新潮流を示す")
ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

