

経済産業省と国土交通省が所管する自動走行ビジネス検討会は2023年4月、前年度の取り組み総括と新年度の取り組み方針案をまとめた報告書「自動走行の実現及び普及に向けた取組報告と方針 version7.0」を発表した。
2022年度は4つのワーキンググループ(WG)が活動し、自動運転実現・普及に向けた議論を深めてきた。
自動運転レベル4を解禁する道路交通法が施行され、大きな節目を迎えた2023年度。本格的な普及に向けどのように取り組みを加速していくのか。Version 7.0の概要を解説していこう。
▼自動走行ビジネス検討会 報告書「自動走行の実現及び普及に向けた取組報告と方針 Version7.0」
https://www.meti.go.jp/policy/mono_info_service/mono/automobile/jido_soko/20230428_report.html
記事の目次
■自動走行ビジネス検討会の取り組み概要
2016年度から毎年取組方針を発表
自動走行ビジネス検討会は、産学官のオールジャパン体制で自動運転技術の早期確立・ビジネス化を実現するため2015年2月に設立された。2016年度から毎年度「自動走行の実現に向けた取組方針(取組報告と方針)」を取りまとめており、7年目を迎えた2022年度バージョンがVersion 7.0となる。
version1.0では、レベル2のADAS(先進運転支援システム)を含む一般車両の自動走行などの将来像の明確化や協調領域の特定などを進めてきた。
version2.0では、研究開発成果を活用した安全性の評価方法の在り方などを中心に議論を進め、version3.0では、安全性評価方法の在り方や人材育成・確保に係る検討などを実施した。
version4.0では、無人自動運転サービスの実現・普及に向けたロードマップを策定し、version5.0では次期プロジェクトの工程表や、実証実施者の協調による取り組み推進、今後の協調領域として取り組むことが考えられる課題などを整理した。
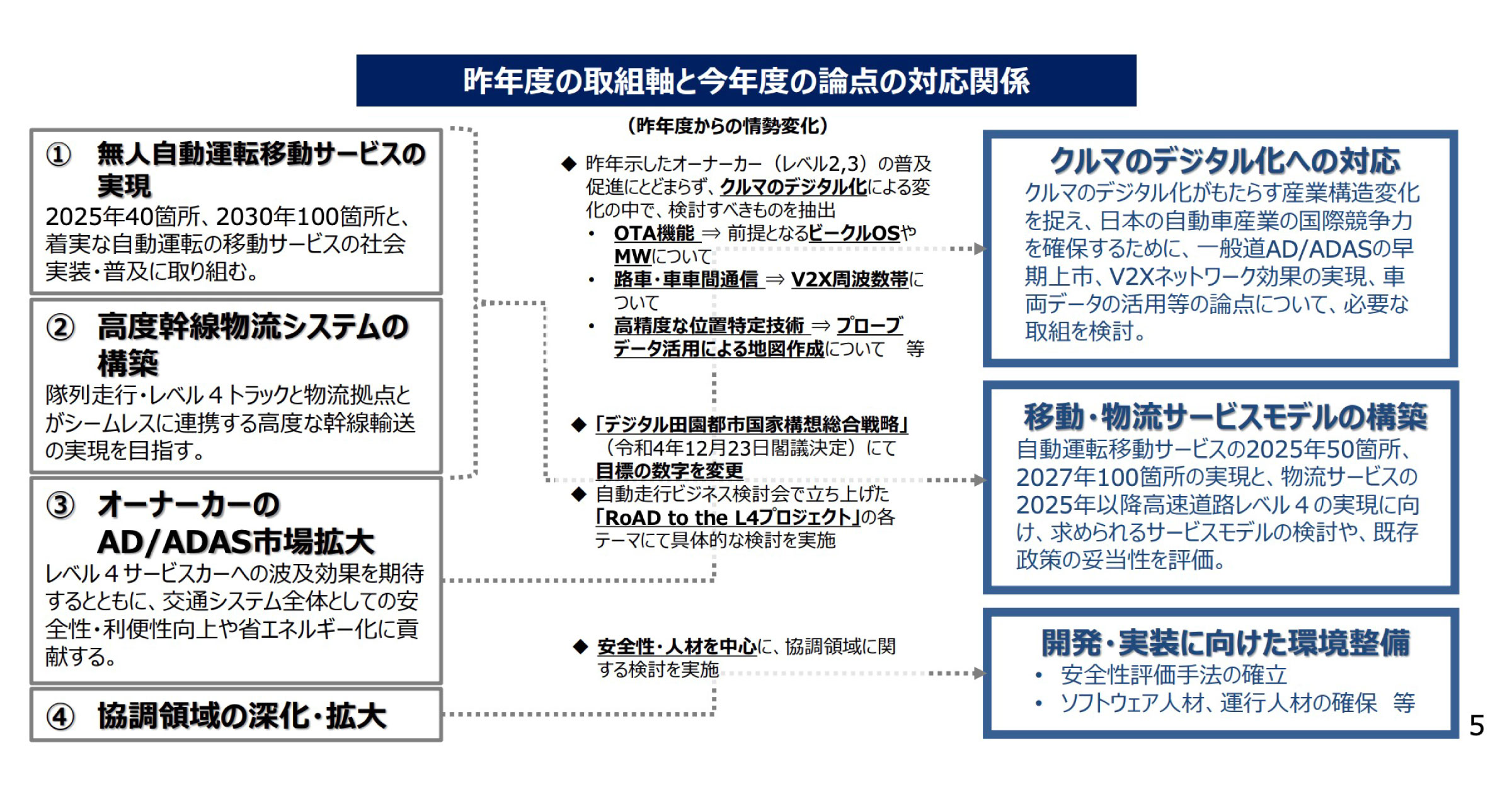
version6.0では、無人自動運転移動サービスと高度幹線物流システム、オーナーカーAD(自動運転)・ADASの3軸に切り分け、取り組みの方向性を整理した。
2022年度以降は、無人自動運転サービスや高度幹線物流システムの構築に向けた取り組みの加速、オーナーカーAD・ADASの普及、協調領域の進化・拡大、終了するSIPからRoAD to the L4プロジェクトに引き継ぐべき課題・内容の整理といった体制の見直しを進めていくとしている。
2022年度はクルマのデジタル化などに焦点
Version7.0となる2022年度は、自動運転・デジタル化戦略WG、自動運転移動・物流サービス社会実装WG、安全性評価戦略WG、人材戦略WGの4つのグループで検討を進めた。
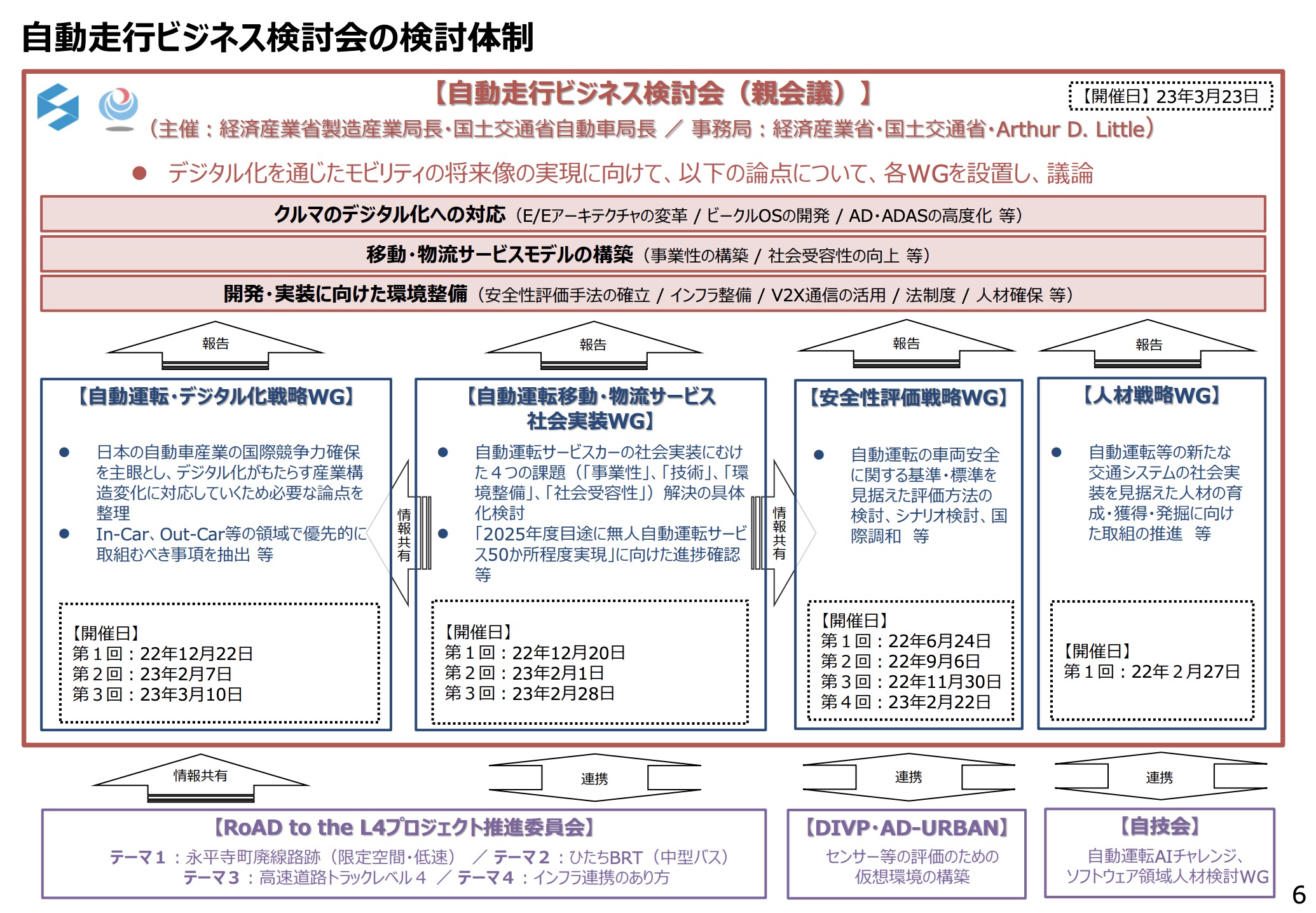
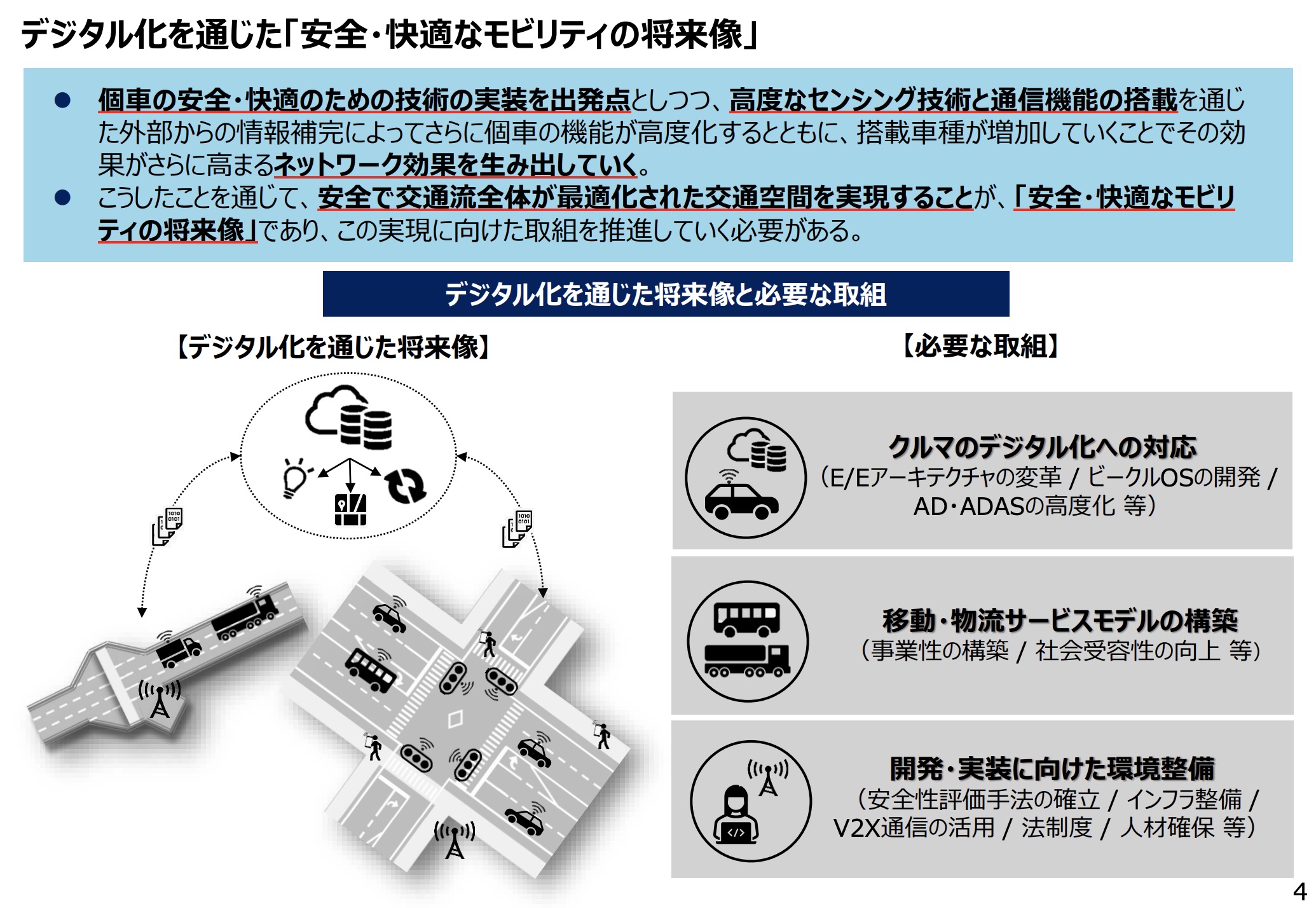
センシング技術や通信機能といったデジタル化を通じ、「安全で交通流全体が最適化された交通空間」を「安全・快適なモビリティの将来像」と位置付け、実現に向けた論点として「クルマのデジタル化への対応」「サービスモデルの構築」「開発・実装に向けた環境整備」に焦点を当てた検討を進めていくとしている。
以下、各WGの検討内容を解説していく。
■自動運転・デジタル化戦略WG
デジタル化による新たな協調領域特定へ
自動車業界においてもソフトウェアの相対的価値が向上することにより、各分野に強いプレイヤー が市場シェアを拡張する水平分業化の動きを見せながら、異業種を含めた新興プレイヤーの参入や海外メガサプライヤーのシェア拡大によって日本企業を取り巻く競争環境は激化している。
日本がこうした産業構造変化に対応していくためには、デジタル化による新たな競争環境における協調領域を特定し、これを深化させるべき各論点を整理していかなければならない。
同WGは、この論点を以下に分類した。
- ①In-Car領域(AD/ADAS、E/Eアーキテクチャ、ビークルOS)
- ②V2X周波数帯の確保
- ③Out-Car領域におけるプローブデータの活用
- ④ソフトウェア人材
①のAD/ADAS機能については、機能開発・検証負荷が高く、特定OEM向けの垂直統合型の開発では開発リソースの確保や投資回収が困難になりつつあり、カスタマイズを前提としない水平分業を行う外資系プレイヤーが市場を占有しつつあると指摘している。
このため、AD/ADASの将来像の認識を共有し、ミドルウェア標準化や一般道におけるAD/ADASシステムの共同開発を進めてはどうか――といった意見が出された。
E/EアーキテクチャやビークルOSに関しては、既存ECU機能に加え、IVI(in-vehicle infotainment)やAD/ADAS、モビリティービスといったサードパーティ機能が統合されていくことが期待される一方、ビークルOS導入やその前提となるE/Eアーキテクチャの変革には多額の開発コストや多岐に渡るエコシステム連携が普及のボトルネックになり得ると指摘している。
このため、サプライヤー開発資源の分散化防止・早期技術獲得・国際競争力確保に向け、パワートレインごとのE/Eアーキテクチャ変革のロードマップ策定を促す意見や、ソフトウェア開発効率向上に向けた開発資産の共同管理、アプリ開発APIの標準化・開放を進めてはどうか――といった意見が出されている。
5.9GHz帯活用に向けた方法を模索
②のV2X関連では、協調型自動運転社会の実現には、既存の760MHzに加え新たな通信帯域が必要で、国際的に活用が見込まれている5.9GHz帯の活用の必要性などについて議論が必要とする意見や、V2Xに対応した安全性評価環境の構築の検討が必要とする意見が出されている。
760MHz帯は、遠くまで届きよく回り込む性質があるため、位置確認などのやりとりに適する一方、周波数幅(=通信容量)が限られることがネックとなる。情報量が多くなることが想定される将来に向け、即時性・信頼性の高い通信がさらに必要で、二重投資を防ぐ観点などから、国際動向と協調したシステムの導入が望ましい。
国際的に導入が進展する5.9GHz帯は、日本では他用途で利用されており、既存通信の利用者を移行するといった対応が必要となるため、V2Xを5.9GHz帯で実現しなければならない必要性・有効性などについて議論を進めていかなければならない――といった観点だ。
また、V2Xにおける安全性評価環境の構築に向けては、これまでに推進してきたSAKURAプロジェクト(安全性評価シナリオの整備)やDIVP(仮想空間上での安全性評価環境の構築)ではV2Xが加味されていないことから、V2Xに対応した安全性評価環境の構築(シナリオの整備・評価環境の構築)についても検討が必要と結論付けている。
プローブデータによる市街地高精度地図の作成も視野に
③のプローブデータの活用関連では、コネクテッド化によってプローブデータの生成・蓄積が進む一方、データ量に比例して取得コストも増加するため、個社単独での活用では事業性を担保することが困難な点や、専用計測車両による市街地の高精度地図の作成は生成コストの観点から作成ハードルが高い点などが指摘されている。
このため、プローブカーデータの協調活用に向け、交通環境情報を一括管理する共通サーバーの構築や、OEM協調によるプローブカーデータを活用したグローバル市街地高精度地図作成に向けた検討を進めていくこととしている。
④のソフトウェア人材は、2025年時点で自動運転に係るソフトウェア人材が約2万1,000人不足する見通しとしており、既存の人材育成の取り組みを集約するとともにスケール化を図る新たな推進主体を組成すべき――といった意見が出されている。
■自動運転移動・物流サービス社会実装WG
政府目標変更を踏まえつつ考え方を整理
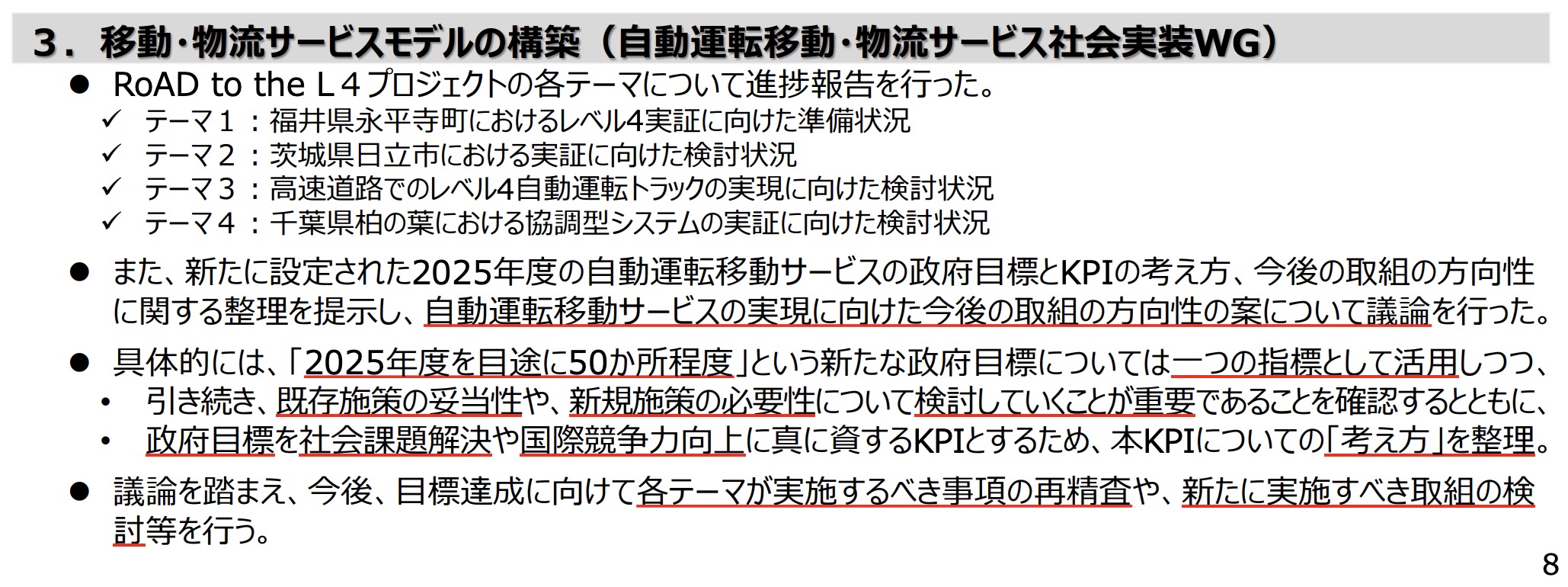
自動運転移動サービスに関しては、デジタル田園都市国家構想総合戦略において実現目標が「2025年度をめどに50カ所程度」に変更された。この新たに設定された政府目標とKPIの考え方、今後の取り組みの方向性に関する整理を提示し、自動運転移動サービス実現に向けた今後の方向性の案について議論を進めた。
2025年度めどに50カ所程度、2027年度までに100カ所以上といった目標に対しては、2025年度末時点で各種法令への適合が満たせていないケースについても将来的な適合を見通せるものや、非公道で道路性もない案件であっても先進的な取り組みや社会に貢献するような取り組み、地域公共交通以外のサービスなども排除しなくてもよいのではないか――など、より多くの取り組みがチャレンジ可能にすべき――といった意見が出されたようだ。
また、RoAD to the L4プロジェクトの各取り組みについても進捗報告が行われている。
福井県永平寺町における公道(車道外)での実証では、レベル4実証を踏まえ、新たに得られた課題の整理や横展開可能な技術・今後の方向性などの整理などを実施予定としている。
茨城県日立市におけるBRTでの自動運転バスの取り組みでは、2023年度の実証結果も踏まえた事業モデル検討を実施する。
高速道路におけるレベル4自動運転トラックは、事業の成立性そのものも含めどのような検討が可能か関係機関や団体と協議予定としている。
千葉県柏の葉における協調型システムの実証では、車両とインフラの機能分担・必要要件を整理し、信頼性評価を実施するほか、多くのステークホルダーのコスト負担を含む事業モデルについて検討していく予定だ。
【参考】RoAD to the L4については「自動運転、「RoAD to the L4」とは?」も参照。
自動運転、「RoAD to the L4」とは? https://t.co/shzRNg74k1 @jidountenlab #自動運転 #プロジェクト #日本
— 自動運転ラボ (@jidountenlab) May 6, 2022
■安全性評価戦略WG
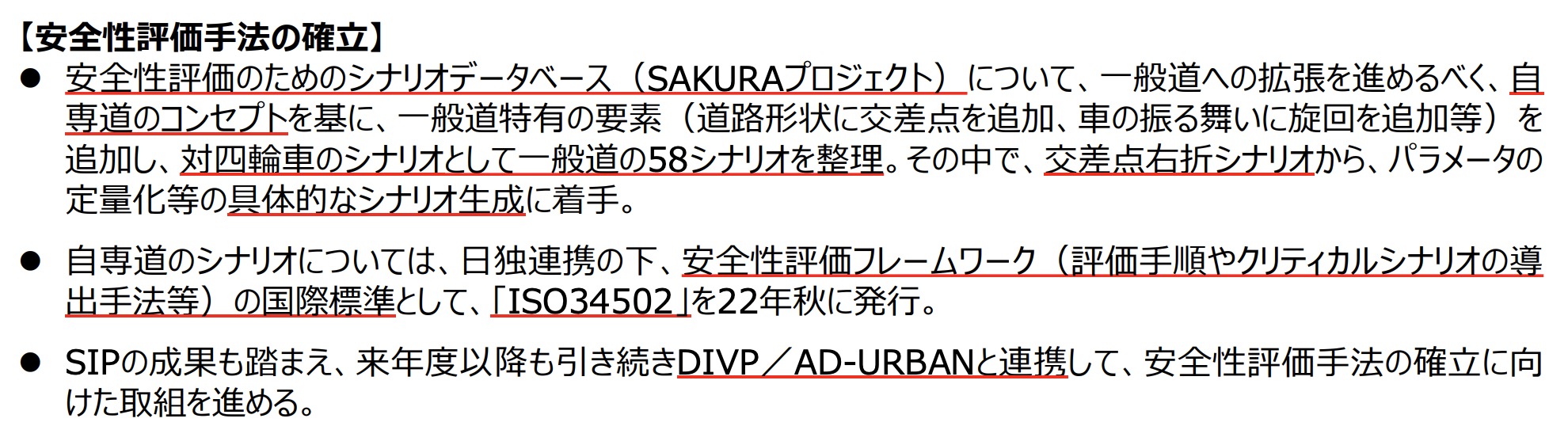
一般道への拡張を推進
自動運転システムが車両の操作を行うことに対応した新たな安全性評価手法の策定が必須で、高速道路における交通外乱のシナリオ検討や、交通外乱に加え認識外乱・車両外乱を体系的に組み合わせたシナリオ検討などを進めている。
2022年度には、シナリオベースの安全性評価フレームワークの議論を日本がリードし、自専道を対象としたISO34502が発行されている。
今後、一般道への拡張を推進するため、自専道と比較し増加する道路形状や交通参加者を想定したシナリオを整理していく。また、仮想空間での自動走行評価環境整備手法の開発事業であるDIVPと連携しつつ、自動運転システムの開発プロセスなどに活用できる安全性評価基盤の構築を推進していく方針だ。
【参考】ISO34502については「自動運転、日本発の「安全性評価」枠組みが国際標準に」も参照。
自動運転、日本発の「安全性評価」枠組みが国際標準に https://t.co/NgdoQCWC3h @jidountenlab #自動運転 #国際標準
— 自動運転ラボ (@jidountenlab) November 20, 2022
■人材戦略WG
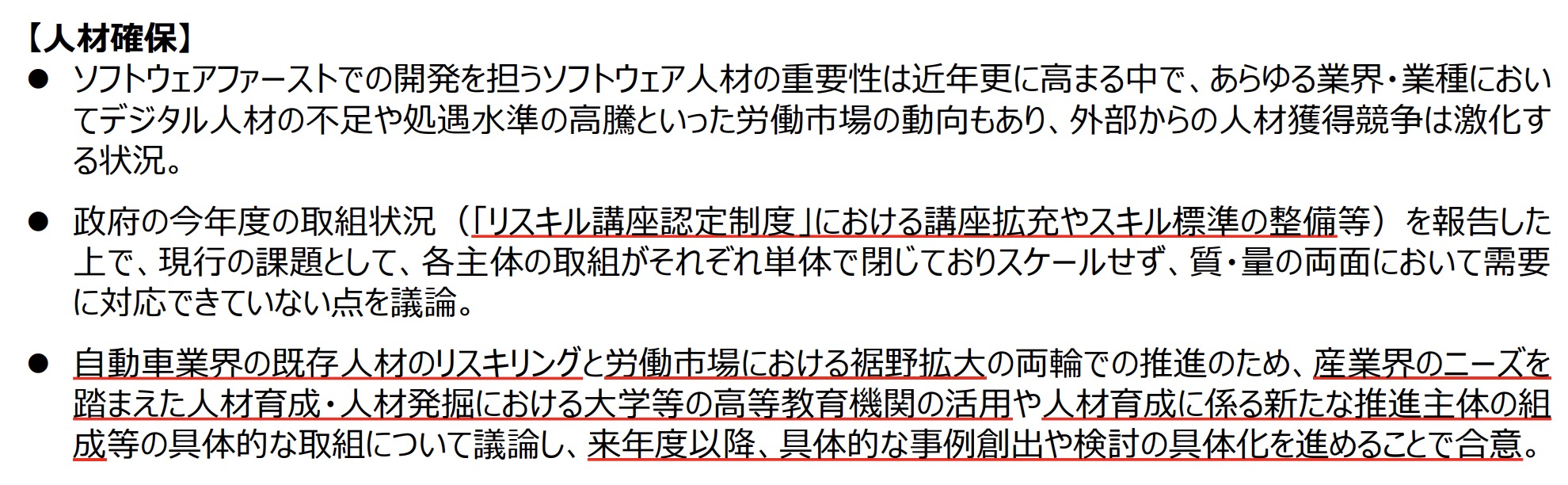
既存人材のリスキリングや労働市場の裾野拡大を推進
経済産業省が2019年度に実施した試算によると、2025年時点で自動運転に係るソフトウェア人材は約2万1,000人不足する見通しという。これを受け、政府は「自動走行IT人材戦略」を策定し、必要な人材をトップ人材とボリュームゾーン人材に整理した上で、求められるスキル水準に応じた各種取り組みを推進してきた。
一方、ソフトウェアファーストで開発を担う人材の重要性はさらなる高まりを見せ、あらゆる業界・業種におけるデジタル人材の不足や処遇水準の高騰といった労働市場の動向もあり、外部からの人材獲得競争は激化の一途をたどっている。
自動車業界の既存人材のリスキリングや労働市場における裾野拡大を両輪で推進していく必要があり、ニーズを踏まえた人材育成・人材発掘における大学などの高等教育機関の活用や、人材育成に係る新たな推進主体の組成などの具体的な取り組みについて議論を進めてきた。
2023年度は、「第四次産業革命スキル習得講座認定制度」における講座拡充を引き続き推進し、WGで整理したソフトウェア人材における重要な人材像に基づき、求められるスキルセットが明確で現場のニーズが高い人材を対象とした講座開設を進める。
また、サイバーセキュリティ人材についても、法制度への対応や安全確保の観点からニーズが高まっているため、自動車分野のサイバーセキュリティに必要なスキル要素を体系的に整理し、講座開設を進めていく方針としている。
■【まとめ】デジタル化への対応と有効活用に注目
クルマのデジタル化に焦点が置かれ、生成されるプローブデータや通信方式などに関する取り組みもますます深化していくものと思われる。引き続き業界の取り組みに注目していきたいところだ。
自動運転の本格的な普及はまだ先だが、この普及に向けた取り組みが2023年度から大きく加速していくことが予想される。世界各国の情勢も然りだ。目まぐるしく情勢が変わる中、数年先を見越した戦略をバージョンアップし続けることは非常に需要なのだ。
※自動運転ラボの資料解説記事は「タグ:資料解説|自動運転ラボ」でまとめて発信しています。
【参考】関連記事としては「【資料解説】自動走行ビジネス検討会「報告書案version 6.0」を読み解く」も参照。






解禁はいつ?")
の意味・定義・読み方は?自動車業界の新潮流を示す")
ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

