

愛知県豊田市内の公道で2019年8月26日に発生した試験走行中の自動運転車による事故に関し、事故検証委員会は11月28日、検証結果を発表した。報告では、リスクアセスメントやフェールセーフ対策の不足などが指摘され、数々の再発防止策が提示されている。
「交通事故」としてはあくまで軽微な類だが、自動運転車が起こした事故として世間の注目度は高い。今回の事故の概要を振り返るとともに、事故検証委員会の報告内容に目を通し、事故がどのようにして発生したのか、またどのような対策を講じる必要があるのかなど見ていこう。
記事の目次
■事故の経緯
実証実験(試験走行)の概要
事故は、実証実験に向けた試験走行中に発生した。豊田市美術館で開催中の展覧会に合わせて2019年8月29日から31日までの期間、名鉄豊田市駅前から美術館を結ぶ片道約1.3キロの移動手段として低速自動運転車を活用する実証実験で、実験に先立ち、8月21日、22日、23日、そして事故が発生した26日に試験走行を実施していた。
使用した車両は、名古屋大学が所有する「ゆっくり自動運転」車両で、4人乗りのヤマハ発動機製ゴルフカートをベースに自動運転システムを搭載したもの。2018年度に同市稲武地区で実施した実証実験でも活用されていた。実証実験では、運転席と助手席にスタッフが搭乗し、後ろのシートに希望者を乗せて時速約15キロで自動走行する予定だった。
事故の概要
事故が発生した8月26日は、自動運転車両管理者の名古屋大学が午前10時ごろから試験走行を実施。午後2時20分ごろ、低速自動運転車両が時速約14キロで市道樹木線を自動運転走行中に、後ろから追い越してきた車両と接触した。
後ろから来た一般車両が低速自動運転車両の右側を追い越そうとした際、低速自動運転車両が急に右側に寄ったことにより接触したとみられる。両車両が破損したもののけが人はなかった。なお、この事故の影響により予定していた実証実験は中止となった。
■初期の事故報道発表
豊田市は8月29日、報道発表で事故の概要を説明した。事故発生時、車両には豊栄交通株式会社の社員が運転者として、また特任准教授と名大研究員2名が同乗していたという。
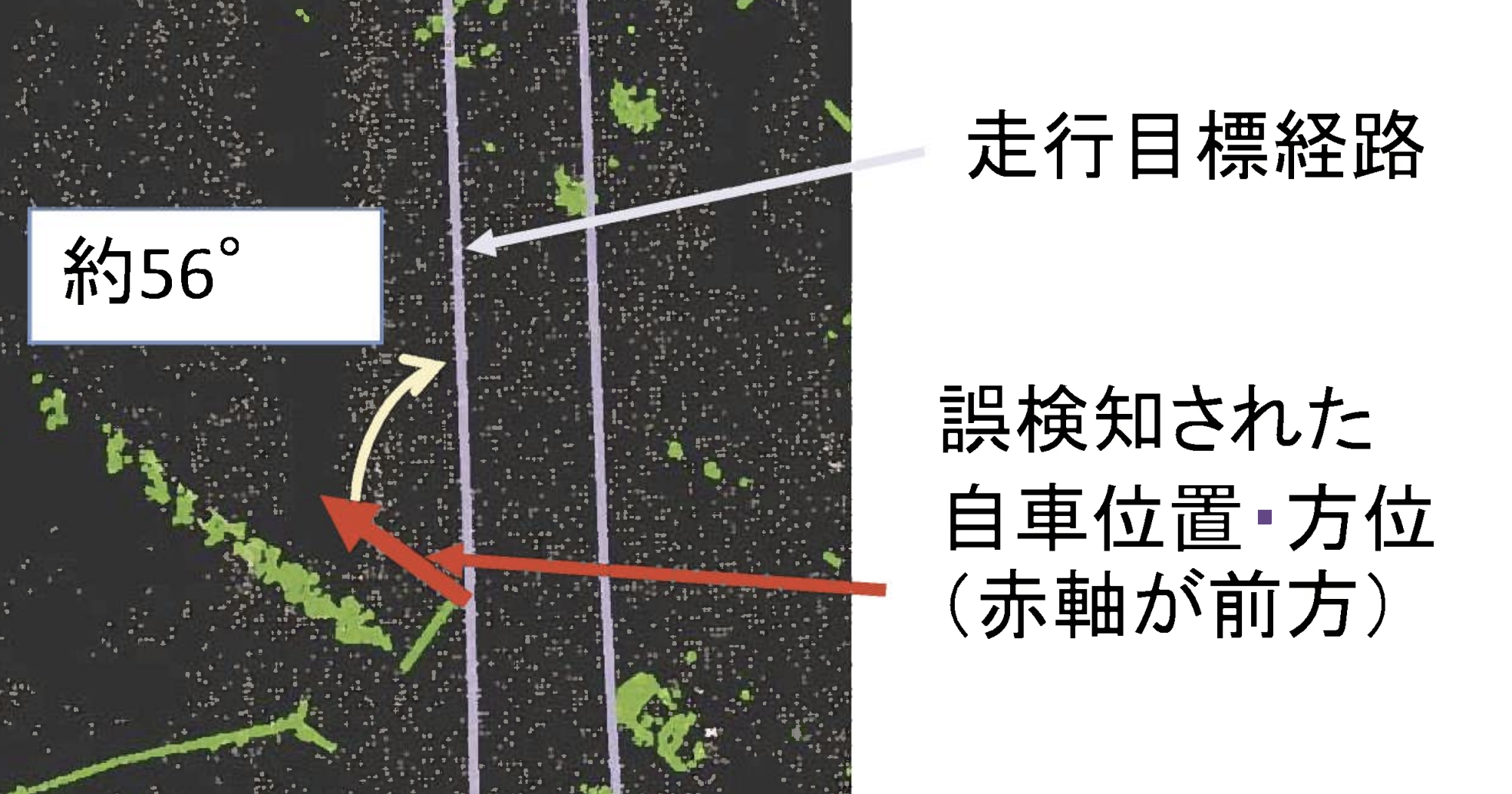
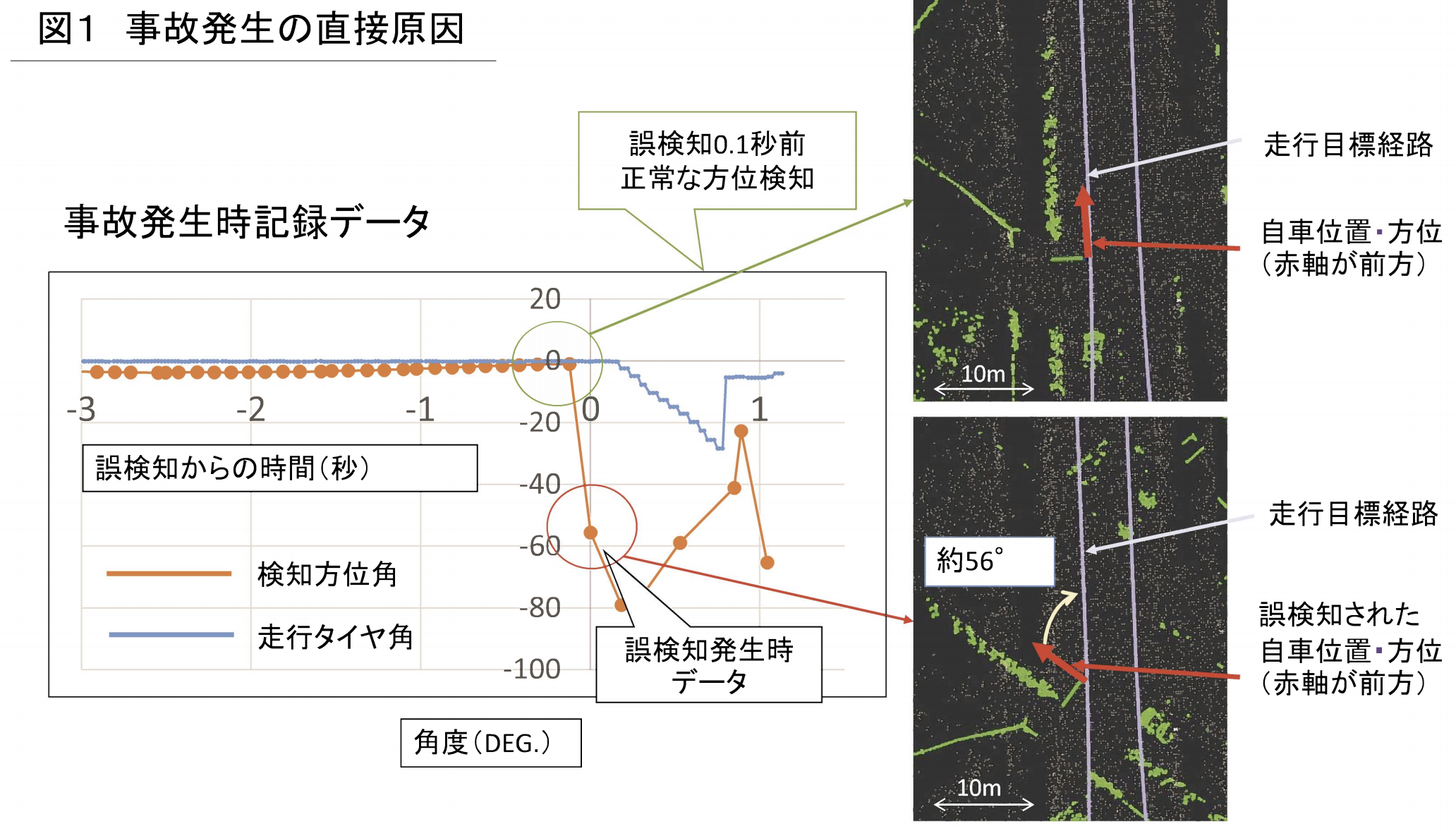
システムは、衝突する1.4秒前まで正常な走行方向を検知していたが、1.3秒前に本来の走行目標経路から自車位置・方向が左側に56度ずれたものと誤検知し、このためシステムが右に向けてハンドルを切ったとされている。
この事故を受け、名古屋大学は学内に事故検証委員会を設置して原因を究明し、再発防止策を検討することとし、原因究明とともに再発防止策が整うまで、「ゆっくり自動運転」の公道実証実験は停止することを決めた。
【参考】事故報道発表については「低速自動運転車の接触事故、システムが自車の向きを誤って認識か」も参照。
■検証結果における事故原因
事故検証委員会は、名古屋大学副総長で未来社会創造機構長の佐宗章弘氏を委員長に学外有識者を含む委員やアドバイザー、オブザーバーで構成され、個別調査や評価試験など交えながら検証を進め、11月28日に検証結果を発表した。
報告では、自動運転車両の位置・方位検知機能が進行すべき方位を誤検知したことを事故の直接的な原因とし、誤った急操舵が生じたとした。誤検知を引き起こす要因としては、コンピューターやセンサー系の遅延などにより、初期推定値の真値からのずれが拡大することで、検知探索機能が正常に働かなくなったためである可能性が極めて高いとしている。
本件事故の事後解析データからは、これらの複合化された誤検知プロセスを完全に再現することは不可能であったため、初期推定値の誤差を疑似的に発生させるシミュレーション試験を行った結果、方位の誤検知が生じうることが確認されたという。
■事故に関する問題点について
事故に関する問題点では、運用面において①リスクアセスメント水準の低さ②実験実施体制の不備――の2点を挙げている。
①リスクアセスメント水準の低さ
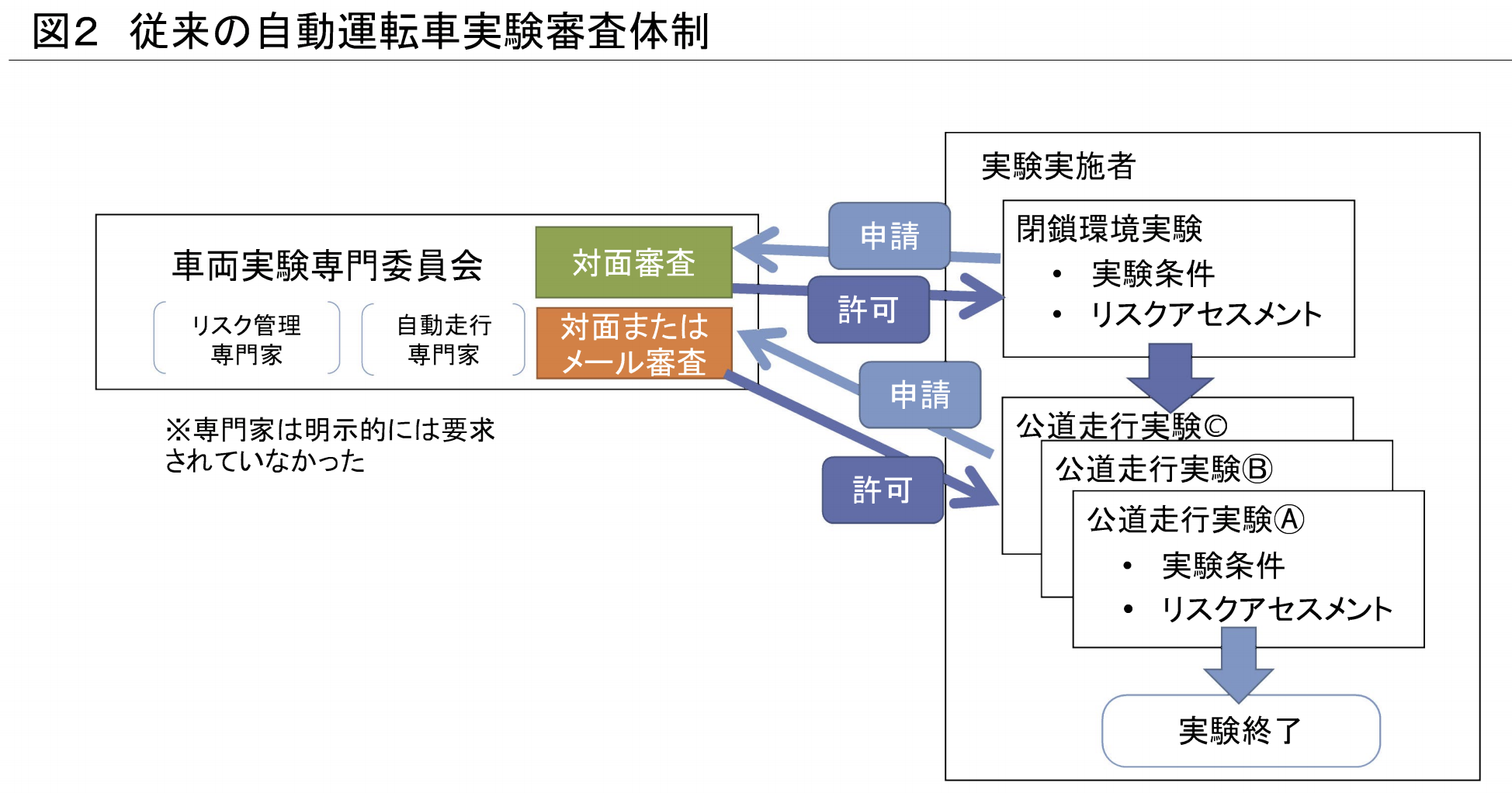
①では、実験実施者が実験計画を申請する段階、及びその審査段階において、事故の発生を事前に予見するためのリスクアセスメントの技術的水準が低く、システム面や運用面、体制など、実験条件を具体的に明確にしたうえでのリスクアセスメント評価が適切にできていなかったと指摘している。
具体的には、申請時に提出するリスクアセスメント実施記録簿の内容が不十分であることをはじめ、車両実験専門委員会に安全面および自動運転に関する専門的見識を持つ者を必ず任命する制度ではなかった点、実験の実施研究者が以前に実施した低速自動運転車の公道実験を事前に審議していたことから、本件事故の実験をその一環としてメール審議により許可した点、実験終了後に報告を受け実施状況を管理する体制ではなかった点などを挙げている。
②実験実施体制の不備
②では、事故が発生した際の関係機関への連絡が、実験計画書の緊急連絡体制のとおりでは機能しなかったことや、届け出内容と異なり伴走車が走行していなかった点、書類の更新不備により、実験計画申請書の実験参加者に運転者が記載されていなかった点を挙げている。
また、技術的問題点として、現在の技術レベルでは位置・方位検知機能の誤検知の可能性をゼロにすることは実効上不可能であるのに対し、本件事故においては、その対策としてドライバー操作のみに依存した対策しかなされていなかったため、十分な安全を担保できなかったとしている。
自動運転システムの構成として、それが原理的に発生しうるものであると認識し、誤作動や障害が発生した際にシステムを安全側に制御するフェールセーフ対策をしっかりと講じるべきと指摘している。
■再発防止策(運用面)について
再発防止策として、運用面においては①車両実験審査体制の強化②実験実施体制の徹底――を挙げている。
①車両実験審査体制の強化
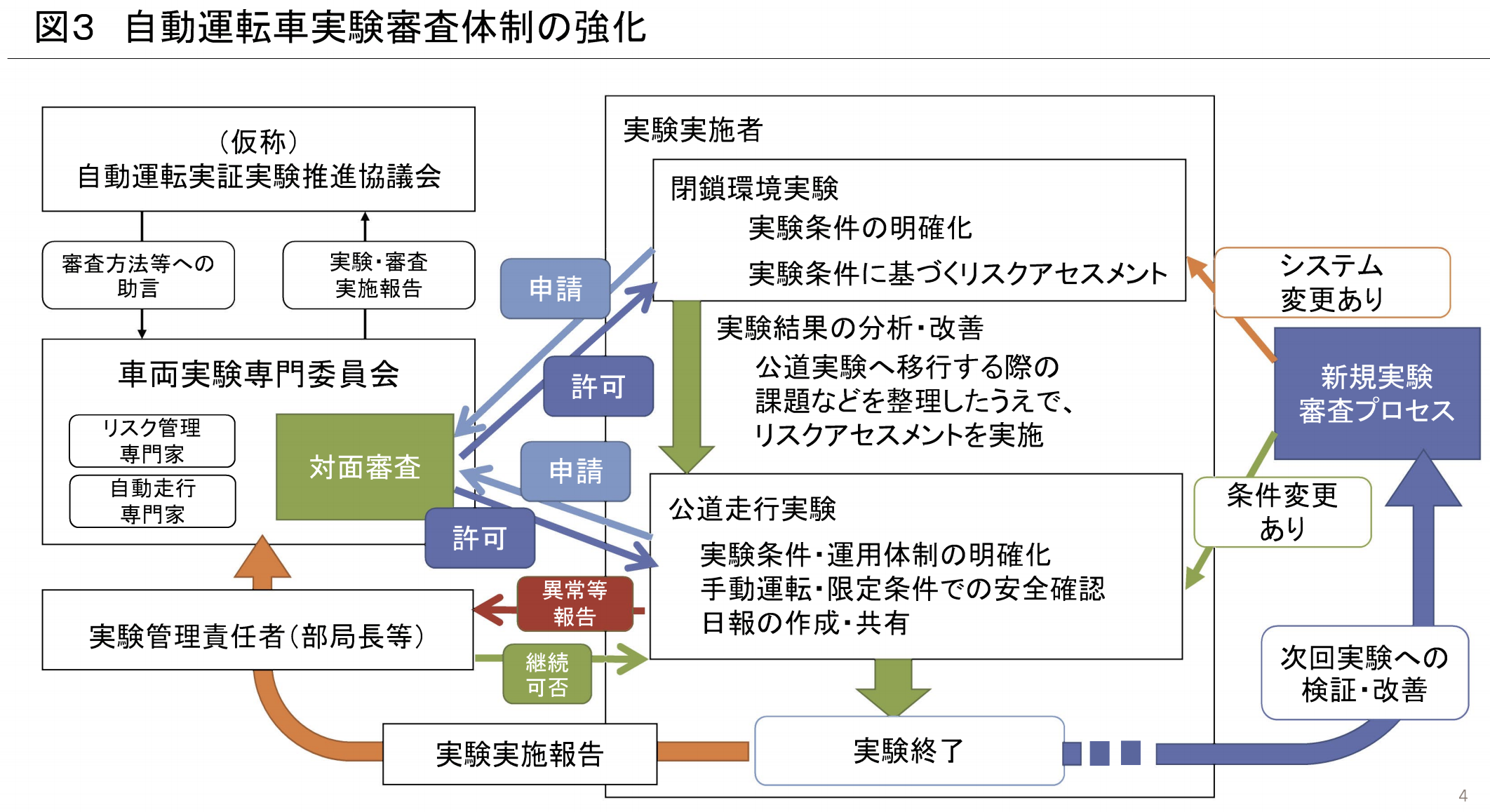
①では、車両実験専門委員会に自動運転やロボティクス分野のリスクアセスメントを行える専門家を加えるとともに、未来社会創造機構内に審査プロセスの実態を把握し、組織、運用の脆弱性を常に指摘できる制度を設けることや、リスクアセスメント実施記録簿を適切に改訂し、実験の審査プロセスにおいて実験実施場所ごとに詳細な実験条件や体制などを明記したうえでのリスクアセスメントを実施し、車両実験専門委員会において聞き取りを行ったうえで可否を判断する体制の構築などを進めることとしている。
②実験実施体制の徹底
②では、緊急時の連絡体制として個人ではなく組織的な窓口を用意し、そこから関連する個人に情報を展開する等の実効性を伴う体制とすることや、実験計画申請書の詳細な記述、実験の実施事項や課題などを端的に記述した日報の作成・共有、運転者への事前教育項目に必要事項を追加するほか、実験時には運転者に対し、周辺に危険要因のある地点ではハンドルに手を添えたり、ブレーキを構えたりするなどの運転姿勢をとらせることなどを盛り込んだ。
■再発防止策(技術面)について
また、技術面での再発防止策として①位置・方位検知機能の監視機構②走行経路計算の監視③センサー・認識系の作動状態監視機能④自動停車処理との連動⑤後続車、交差車両警告機能の導入⑥飛び出し等に対する非常停止機能の導入――の6項目を挙げた。
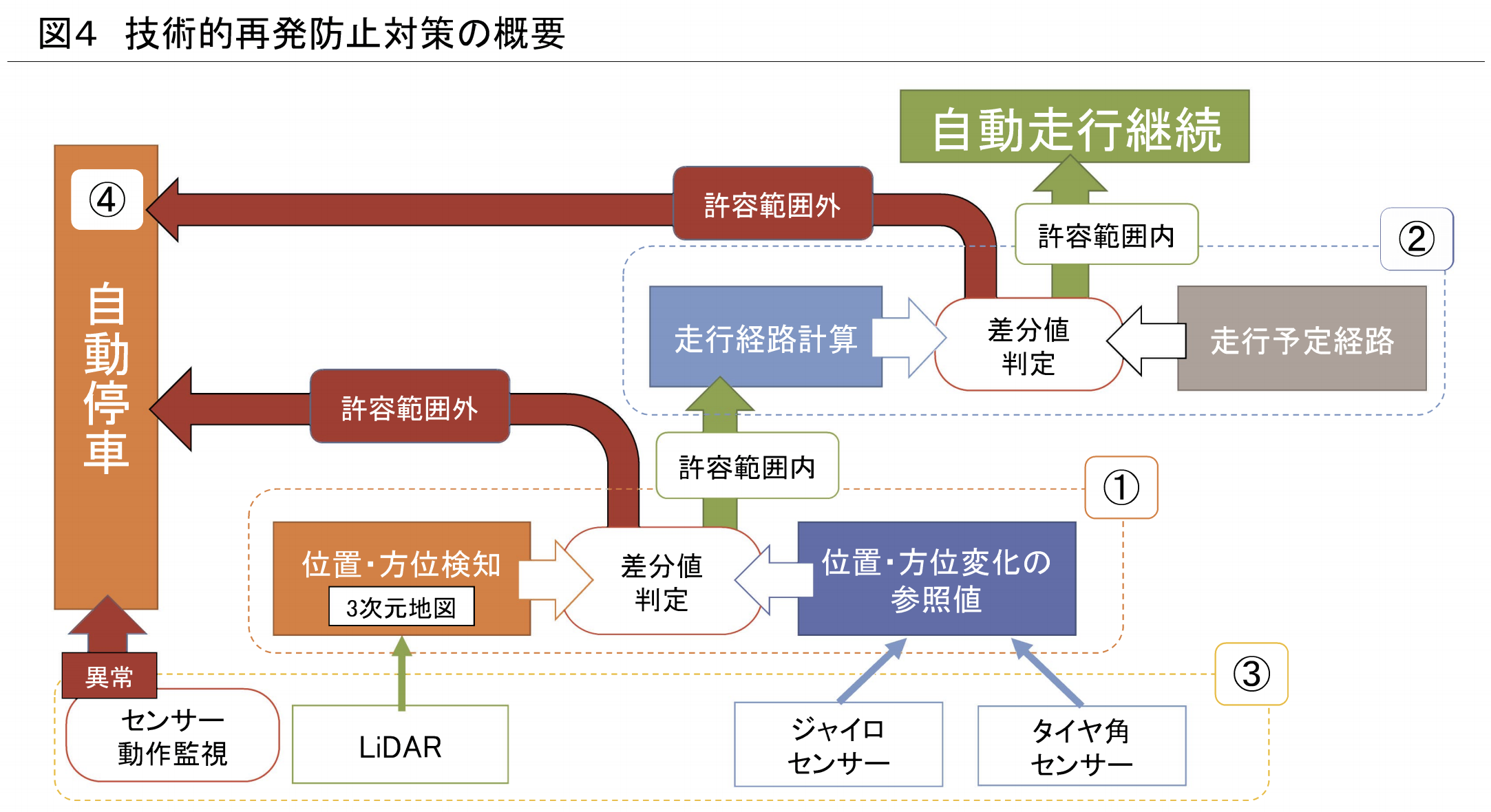
①位置・方位検知機能の監視機構
①では、タイヤ角センサーやジャイロセンサーといった車両の物理的運動量を直接的に計測する方法のデータから現在の旋回角速度を計算することで、位置・方位角変化の参照値とし、この旋回角速度参照値と、位置・方位検知機能単独によって、3次元点群から算出した方位角の変化(角速度)を比較し、差分値が一定以上となった場合は異常として扱い自動停車処理を呼び出す機能を搭載することとした。
②走行経路計算の監視
②では、走行予定経路(高精度道路地図の道路線形)から、近傍の経路上を走行するために必要な速度と旋回角速度を算出することで参照値とし、走行制御に用いる走行経路計算の結果(速度と旋回角速度)との差分値が一定以上になった場合は、急加速および急操舵を防止するため、自動停車処理を呼び出す機能を搭載することとした。
③センサー・認識系の作動状態監視機能
③では、各種センサーをはじめジャイロや車体CAN、LiDAR(ライダー)、カメラ、方位検知、経路計画などの認知機能の更新を監視し、設計された時間内に応答がない場合は、自動停車処理を行う機能を搭載することとした。
④自動停車処理との連動
④では、①~③に連動した自動停車処理を搭載することとし、速度を緩やかに減速させ、旋回角度は処理開始時の値を維持する設計とした。
⑤後続車、交差車両警告機能の導入
⑤では、運転者から死角になる後方部分および交差点走行時に交錯する車線上に障害物が接近した場合、音声や警告灯などで警告を行う機能を導入することとした。
⑥飛び出し等に対する非常停止機能の導入
⑥では、従来の障害物に対する自動停車機能を強化するため,運転手の反応時間では停車が困難な障害物が直前に出現した際に自動的に緊急停車を行う機能を導入することとした。
■ゆっくり自動運転とは?
名古屋大学未来社会創造機構が取り組んでいる「低速度で人や社会と協調する自動運転技術」で、無人運転によるさまざまな地域内移動サービスの実現を目指している。
車両は、トヨタ車体製のコムスをベースにした1号機と、ヤマハ発動機製の電動ゴルフカートをベースにした2号機がある。
同機構は自治体などの協力のもと公道などで公開実証実験を行っており、2017年度に愛知県豊田市足助地区と愛知県春日井市高蔵寺ニュータウン、2018年度に愛知県豊田市稲武地区と愛知県春日井市高蔵寺ニュータウン、2019年度に兵庫県神戸市でそれぞれ実施している。
■【まとめ】加速する公道実証 業界総出で事故防止策を
豊田市、名古屋大学はともに全国の自治体や大学の中でも自動運転の実現に力を入れている有数の地域・組織であり、数多く実施している公道実証の中から今回の事故が発生した格好だ。突発的に発生した誤作動であれ、回を重ねる中で慢心が生まれていたのではないか?と言われれば否定できない状況だろう。
全国各地で公道実証が加速する中、今後も自動運転実証における事故が発生する可能性は否めない。名古屋大学に限らず、自動運転開発業界は本件を他山の石とし、事故の未然防止を図るとともに開発精度をいっそう高める努力が求められる。
【参考】関連記事としては「【最新版】自動運転の事故まとめ ウーバーやテスラが起こした死亡事故の事例を解説」も参照。







の意味・読み方は?自動車業界の新潮流を示す")
ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

