

最新技術やアイデアが次から次へと創出される自動運転分野。特許庁や特許検索・特許分析サービスを手掛けるパテント・インテグレーションによる調査によると、「自動運転」関連の特許出願件数は国内、国外(米国、欧州、中国、韓国)ともトヨタがトップとなっているようだ。
この記事では、技術やアイデアの宝庫・トヨタの特許出願案件に迫っていく。
【参考】特許庁による調査結果については「トヨタ、世界でダブル首位!自動運転&MaaSの特許出願、米中勢抑え」も参照。パテント・インテグレーションによる調査結果については「トヨタ独走!自動運転の特許出願件数、2019年は国内で234件」も参照。
記事の目次
- ■特許情報プラットフォーム「J-PlatPat」で検索
- ■トヨタが出願した特許・実用新案
- 自動運転車両の円滑な運行をより確実に実現できる自動運転車両とその制御方法(特願2020-66599/2020年4月2日)
- 自動運転制御を中断する場合に車両の乗員や周辺車両に自動運転制御の中断を情報提供する技術(特願2020-125235/2020年7月)
- 自動運転車両の停車位置を適切に決定する技術(特願2020-60835/2020年3月)
- 自動バレーパーキングにおける自動運転車の制御方法(特願2020-26435/2020年2月)
- 自動運転システムと車両プラットフォーム間のインターフェースに関わる技術(特願2020-15722/2020年1月)
- 自動運転車両が障害物に接触した際の技術(特願2020-2992/2020年1月)
- 物流インフラ構造に関する技術(特開2021-109712/2020年1月)
- 自動車モニタリングシステムに関する技術(特願2019-231929/2019年12月)
- ■【まとめ】特許出願案件は将来技術の宝庫
■特許情報プラットフォーム「J-PlatPat」で検索
特許情報プラットフォーム「J-PlatPat」でキーワード「トヨタ 自動運転」で特許・実用新案を検索すると、985件がヒットする。必ずしもこの記事で期待される「自動運転」技術と合致するわけではないが、公知日ベースで古くは1979年のものまで存在する。
出願件数は2015年まで概ね年間10件以下だが、2016年に65件と急増し、2017年102件、2018年112件、2019年151件、2020年201件、2021年208件(10月時点)と右肩上がりを続けている。
なお、特許は出願公開制度のもと、原則として出願から1年6カ月経過すると公開される。1年6カ月の秘匿期間経過後、早期公開により産業の発達を促進する狙いがあるようだ。また、特別に申請のあったものなど、1年6カ月を待たずに公開されるものもある。
トヨタの案件では、2021年10月現在公開されている985件のうち、977件が2020年3月までに出願された特許・実用新案となっている。つまり、公開まで基本的にタイムラグが生じることを書き加えておく。
以下、比較的新しい出願案件の中からいくつかピックアップし、内容を紹介していく。なお、カッコ内は「出願番号/出願日」となっている。
▼J-PlatPat [JPP]
https://www.j-platpat.inpit.go.jp/s0100
■トヨタが出願した特許・実用新案
自動運転車両の円滑な運行をより確実に実現できる自動運転車両とその制御方法(特願2020-66599/2020年4月2日)
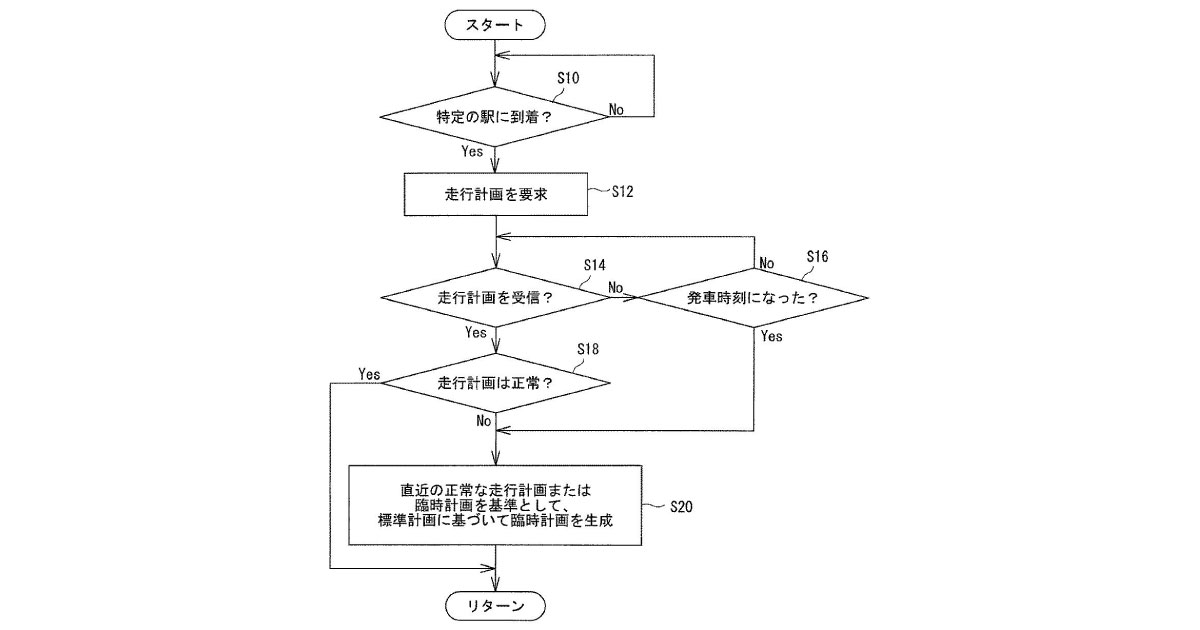
専用路線を走行する自動運転交通システムと複数車両を運行させる管制制御システムにおいて、何らかのトラブルによって車両が運行計画を受信できなかったり運行計画の内容に何らかの異常が発生したりする場合の制御に関する技術だ。
車外に設けられた運行管理装置から走行計画を受信する通信装置と、走行計画を充足するよう、複数の駅が設定された走行経路に沿って自律走行させる自動運転コントローラーを備え、自動運転コントローラーが自車の標準的な運行スケジュールを規定した標準計画を有することで、走行計画に不着や異常があった際にも標準計画に基づいた臨時計画を生成し、臨時計画を充足するよう自車を自律走行させる技術のようだ。
自動運転制御を中断する場合に車両の乗員や周辺車両に自動運転制御の中断を情報提供する技術(特願2020-125235/2020年7月)
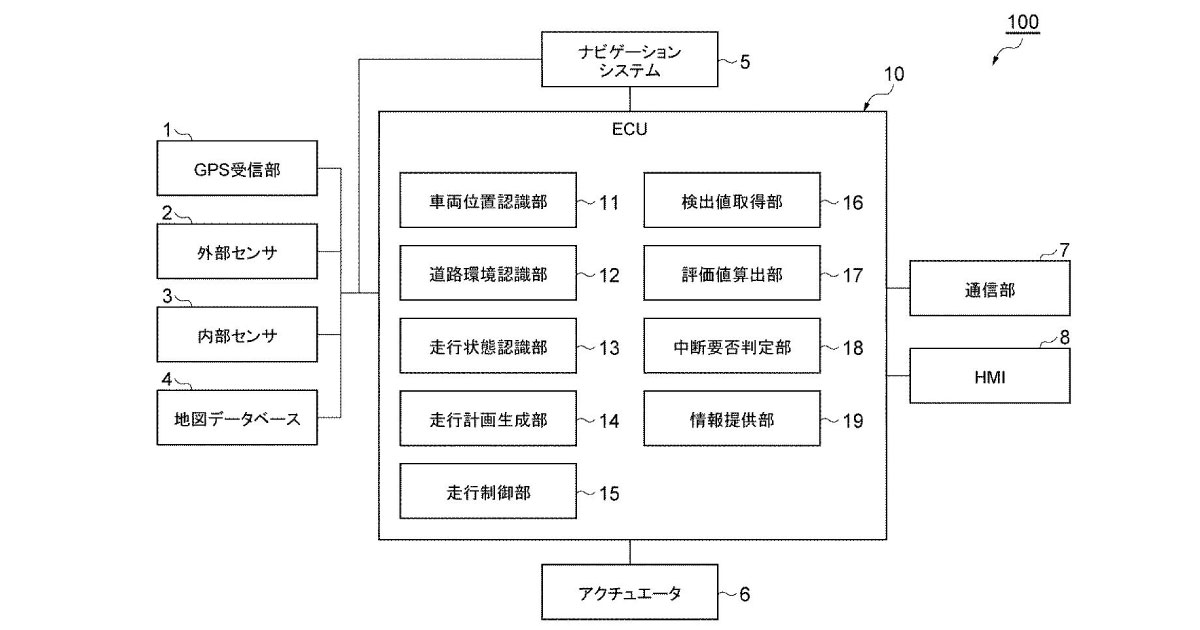
自動運転制御を中断する際に、車両の乗員や周辺車両に自動運転制御の中断を情報提供する技術となっている。
車両の制御目標値と制御結果検出値の比較結果に基づき、自動運転制御の中断の要否を判定する中断要否判定部と、中断要否判定部により自動運転制御の中断が必要と判定された際に、車両の乗員や車両周辺の他車両に対し自動運転制御の中断情報を提供する情報提供部を備えることで、地図情報に起因する自動運転制御の中断情報を提供することができるとしている。
自動運転車両の停車位置を適切に決定する技術(特願2020-60835/2020年3月)
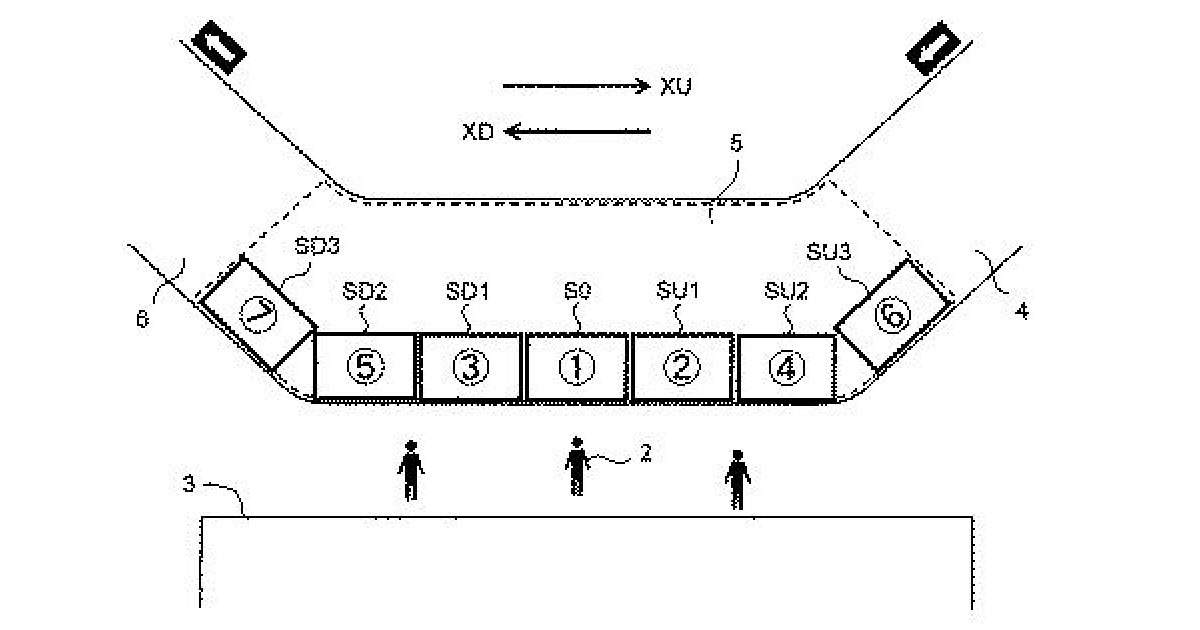
ドライバーレス輸送サービスなどにおいては、利用者をピックアップ・ドロップオフする所定の乗降エリアが設けられている場合があるが、その際に乗降エリア内の停車スペースを利用者の観点から適切に決定するための技術だ。
乗降エリア内の目標停車スペースに停車するよう車両を制御するプロセッサと、乗降エリア内の標準停車スペースの位置を示す標準停車位置情報、車両周囲の状況を示す周辺状況情報などに基づく技術で、乗客をドロップオフする際に標準停車スペースに停車できない場合、上流エリアをまず探索し、次に下流の空きスペースを探索する仕組みにすることで、乗客の利便性向上や車両の効率的な運行が可能になるとしている。
自動バレーパーキングにおける自動運転車の制御方法(特願2020-26435/2020年2月)
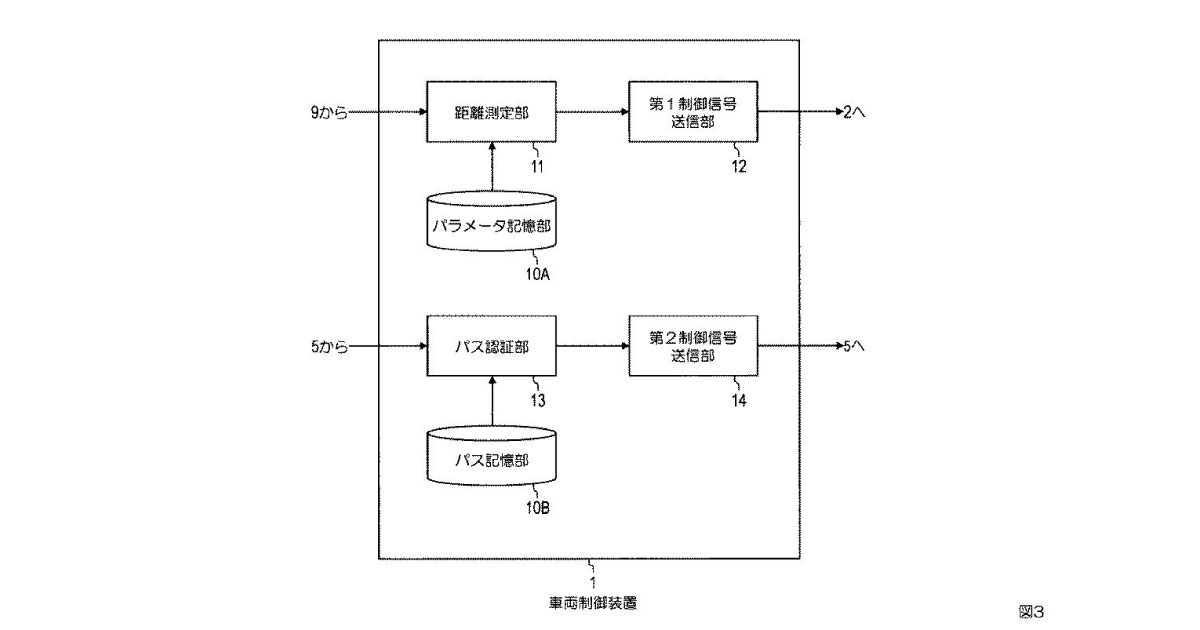
自動バレーパーキングが可能な駐車場内で自動運転車と有人運転車が混走するケースにおいて、有人運転車を優先し、ドライバーのストレスを軽減するよう制御する技術だ。
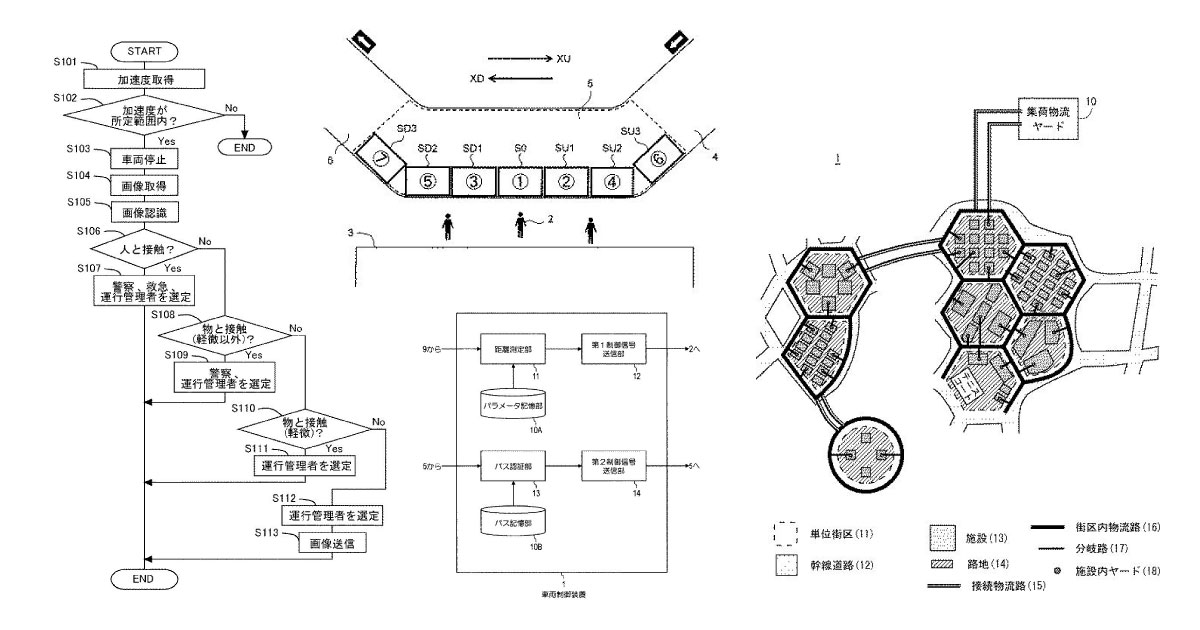
まず、制御対象となる自動運転車と先行する有人運転車との距離Dと、後続する有人運転車との距離Lを測定する。この結果をもとに、制御信号送信部はD、Lともに所定の距離以上である場合に限り駐車スペースに設けられた待機エリアから出て混走路を所定の速度で走行するよう指示し、それ以外の場合は待機エリアで待機させる制御信号を送信する仕組みだ。
自動運転システムと車両プラットフォーム間のインターフェースに関わる技術(特願2020-15722/2020年1月)
自動運転システムを車両本体に外付けするケースにおいて、自動運転システムと車両プラットフォームの連携を適切なものとするインターフェースに関する技術だ。
自動運転システムと同システムからの指令に従って車両を制御する車両プラットフォームとの間の車両制御インターフェースが機能することで、異なる開発者間で開発された自動運転システムと車両の連携を適切なものとする技術のようだ。
自動運転車両が障害物に接触した際の技術(特願2020-2992/2020年1月)
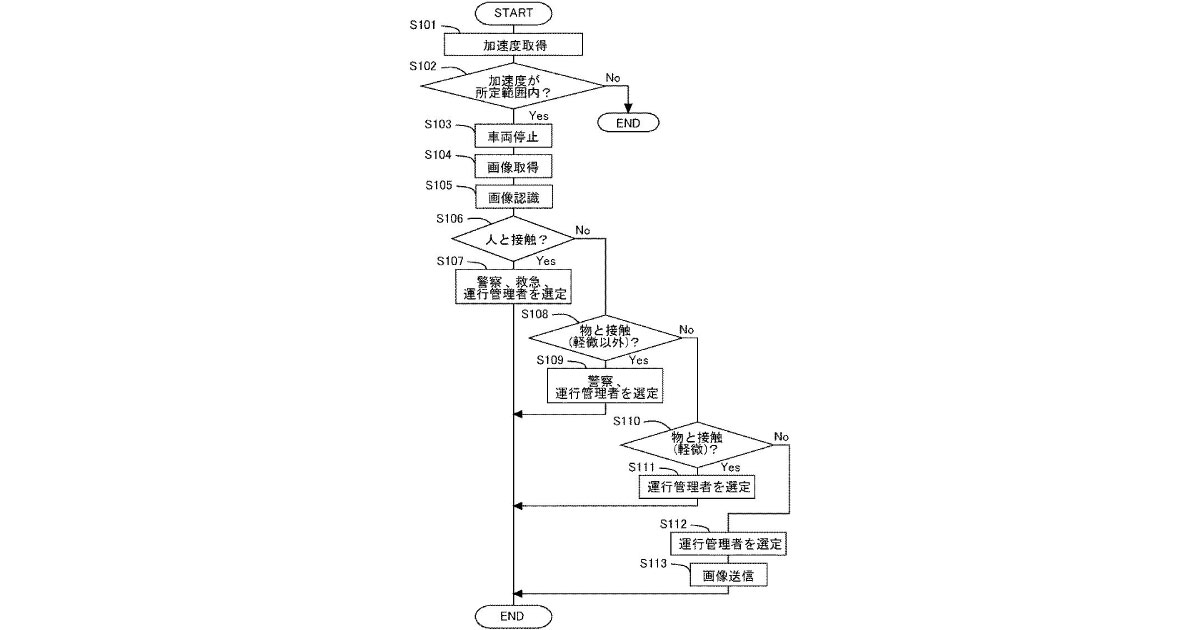
自動運転車両は、事故が起きたかどうかや何に衝突したかを判断することが困難な場合があり、こうした際に適切な措置をとる手助けとなる技術だ。
車両が障害物に接触すると衝撃に応じて車両の速度が変化するが、この車両が受けた加速度が自動運転に起因するものかどうかをセンサーなどで検出し、想定される範囲を外れている場合にはその加速度は自動運転に起因するものではないと判定する。
判定結果が所定の条件を満たした場合は車両が障害物に接触した可能性が高いため、制御部は車両を停止させ、カメラで車両の周囲の画像を取得する。その画像に基づいて、制御部が緊急通報先などを決定する仕組みだ。
物流インフラ構造に関する技術(特開2021-109712/2020年1月)
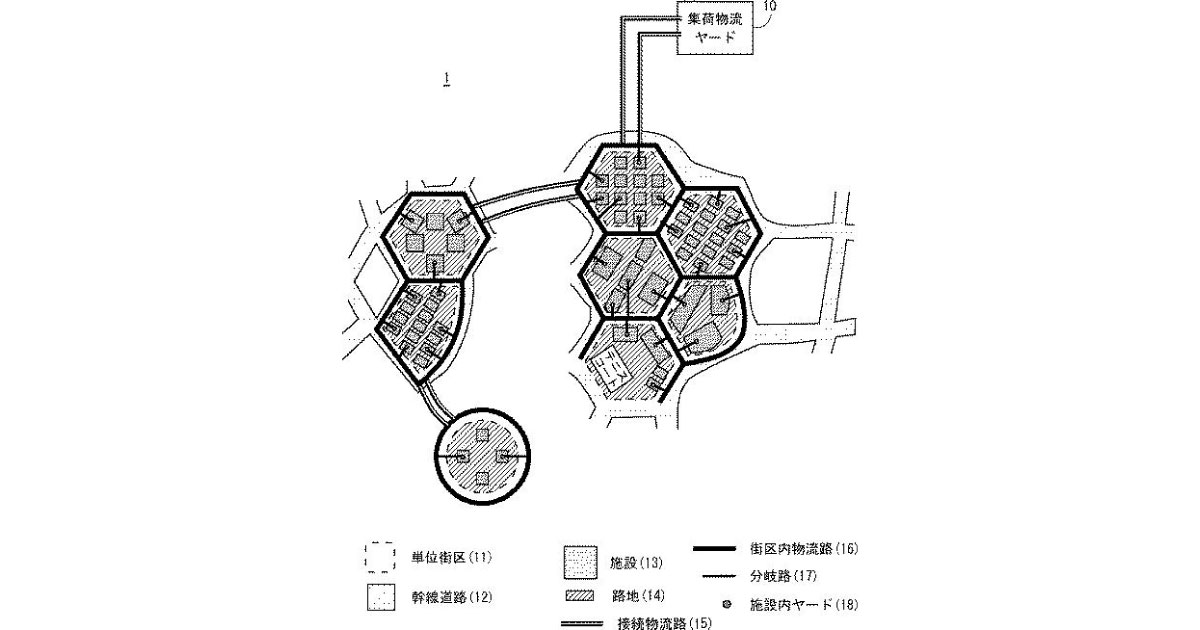
自動走行ロボット実用化に向けた物流インフラ構造に関する技術だ。
物流インフラ構造の一態様として、少なくとも一部が歩道や車道とは異なるレイヤーに設けられた街区内物流路と、単位街区の外周に面する施設にアクセス可能な分岐路、集荷物流ヤードと前記街区内物流路を接続する接続物流路を効果的に敷設することで、物流網の拡張性を高めることができるとする技術だ。
街区内物流路を、単位街区の周囲をループ状に囲むように設けることで物流網の効率性と拡張性を高める効果を見込んでいる。自動走行ロボットは、この街区内物流路を走行するようだ。
自動車モニタリングシステムに関する技術(特願2019-231929/2019年12月)

まちなかを走行する自動運転車同士が相互に走行状況をモニタリングする技術だ。自動運転車が普及すると、センサー認識範囲内に別の自動運転車が存在することも多くなる。同じ走行状況下においては、双方の自動運転プログラムは類似した結果を出すという前提に立てば、互いに相手の次の行動を予測することが可能になる。
仮に、検知した他車両の動作が許容範囲を超えて予測結果と相違する場合、その車両などに異常発生の可能性を示す信号を出力する。信号を受け取った車両は、これをもとに自車の動作をチェックすることで、自身の異常検知手段では検知し得ない異常を発見できる可能性も指摘している。
■【まとめ】特許出願案件は将来技術の宝庫
このほかにも、ターンオーバーリクエストに関するものやバッテリー関連、報知装置に関するものなど、多岐に渡る技術・アイデアが出願されている。
こうしたさまざまな技術やアイデアは、将来技術の宝庫としてさらなるブラッシュアップを重ねた後、必要に応じて順次社会に実装されていくことになる。自動運転分野における技術の発展をリードするトヨタの取り組みに引き続き期待したい。
【参考】関連記事としては「トヨタの自動運転戦略とは?「e-Pallete」が戦略の軸」も参照。


とは?日本やアメリカ・中国の状況は?")




の意味・読み方は?自動車業界の新潮流を示す")
・自動運転ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル・スズキ】欧米車種も")

