


自動運転技術の社会実装が進展しているが、その活躍の場は道路に限らない。農業の現場では、自動運転農機=ロボット農機の開発が進み、一定レベルの無人作業を可能にしている。
スマート農業実現に資する重要な技術として早くから官民協働のもと研究開発が進められており、2017年には「農業機械の自動走行に関する安全性確保ガイドライン」が策定された。
2023年3月には、新たにロボットコンバインに対応するようガイドラインが改訂されるなど、現在進行形でアップデートを重ねている。
この記事では、同ガイドラインをベースに、ロボット農機の現在に迫る。
▼農業機械の自動走行に関する安全性確保ガイドラインの概要|農林水産省
https://www.maff.go.jp/j/press/nousan/gizyutu/attach/pdf/230329-1.pdf
▼農業機械の自動走行に関する安全性確保ガイドライン
https://www.maff.go.jp/j/press/nousan/gizyutu/attach/pdf/230329-2.pdf
記事の目次
■ガイドライン策定に向けた取り組み
スマート農業実現に向け研究会設立
農水省は2013年、「スマート農業の実現に向けた研究会」を設置し、ロボットやICT技術を活用したスマート農業実現に向けた取り組みに本格着手した。
先端技術によってもたらされる新たな農業の姿について、①超省力・大規模生産②作物の能力を最大限に発揮③きつい作業、危険な作業から解放④誰もが取り組みやすい農業⑤消費者・実需者に安心と信頼を提供――の5つの方向性に整理し、ロボットや自動運転技術、センシング技術などの導入に向けた研究開発を推し進めている。
農業機械へのロボット・自動運転技術の導入は①③④に資する技術で、省人化や省力化、安全性の向上、熟練技能の代替などに期待が寄せられる。
2017年に指針となるガイドライン作成
そこで農水省は、ロボット技術を組み込み自律走行や作業を行う車両系農業機械の安全性確保を目的に、メーカーや使用者など関係者が遵守すべき指針となる「農業機械の自動走行に関する安全性確保ガイドライン」を2017年に作成した。
その後も、新たなロボット農機の開発状況などを踏まえ修正を重ねており、これまでに5回の改訂を行っている。
■ガイドラインの概要
農機自動化レベル2が対象、ロボットの種類は6種類に拡大
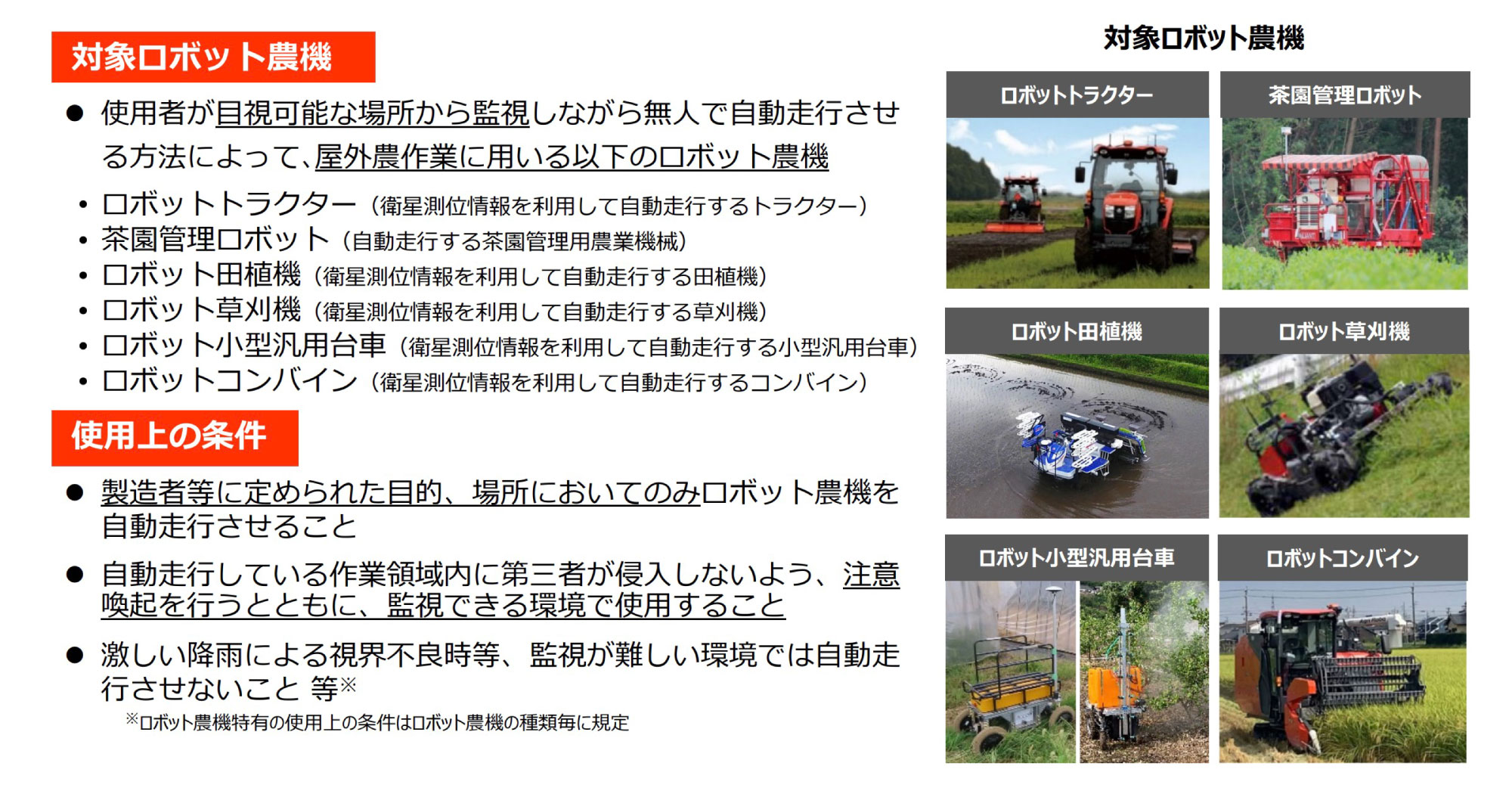
ガイドラインは、ロボット農機に使用者が搭乗せず、無人走行させる方法によって屋外ほ場などの開放系での農作業に用いるものに適用し、ロボット農機の設計や製造、輸入、販売、設置、管理、使用、修理の各段階を対象とする。
対象となるロボット農機は、2023年4月時点で以下となっている。他のタスクを担う農機についても、技術の向上・確立とともに随時加えられていくものと思われる。
- トラクター(衛星測位情報を利用して自動走行するもの)
- 茶園管理用自走式農業機械
- 田植機(衛星測位情報を利用して自動走行するもの)
- 自走式草刈機(衛星測位情報を利用して自動走行するもの)
- 自走式小型汎用台車(衛星測位情報を利用して自動走行するもの)
- コンバイン(衛星測位情報を利用して自動走行するもの)
なお、現時点では使用者がほ場内やほ場周囲などロボットを目視可能な場所から監視する方法に限っている。農機における自動化レベル2に相当するロボット農機を対象としており、完全な遠隔監視型となるレベル3は対象外だ。
【参考】農機の自動化レベルについては「スマート農業で自動運転技術が活躍!仕組みや各社の動向を解説」も参照。
「無人農業」における技術リファレンス 自動運転技術、ロボット技術、IT技術… https://t.co/FFUR6sszAY @jidountenlab #無人農業 #スマート農業 #自動運転
— 自動運転ラボ (@jidountenlab) May 10, 2019
■ガイドラインにおける共通事項
安全確保に向けた共通事項を規定
ガイドラインは2部構成で、1部では安全性確保の原則やリスクアセスメントと保護方策の実施方法、使用上の条件、安全性確保に向けた関係者の取り組みなど、共通事項が規定されている。
共通事項としては、以下の各項目について細かく規定されている。
- ①安全性確保の原則
- ②リスクアセスメントと保護方策等
- ③使用上の条件等
- ④安全性確保のための関係者の取組
- ⑤事故等発生時の対応
- ⑥国等の施策
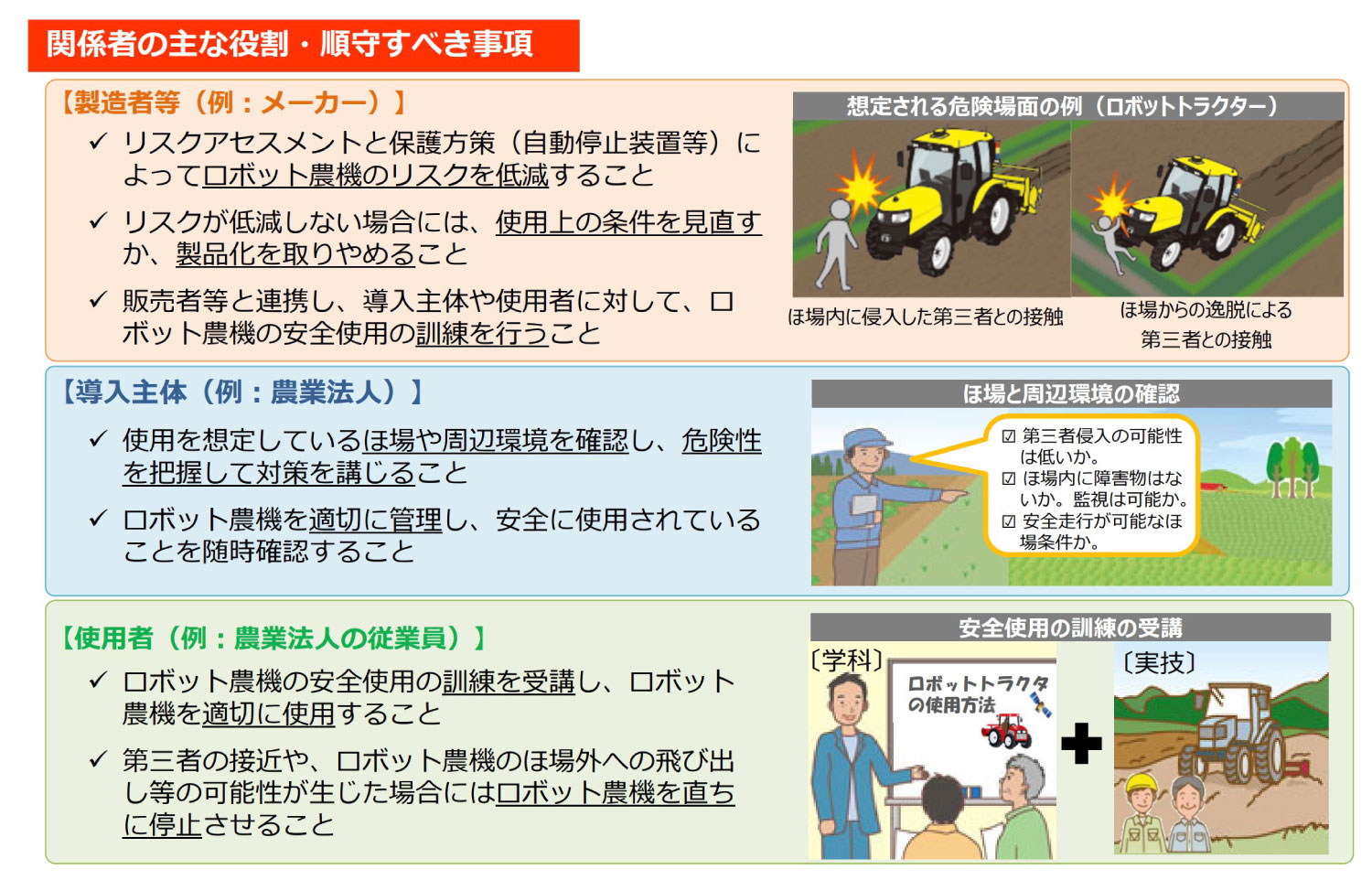
①では、ロボット農機の安全性確保に向け、ロボット農機の特性、製造者等・販売者等・導入主体・使用者、管理等・販売等・使用の状況、類似する事故の事例を踏まえたロボット農機のリスクアセスメントと、その結果に基づく保護方策の立案・リスク低減効果の検証を反復し、許容可能な程度にリスクを低減することとしている。
②の保護方策においては、ロボット農機が計画上の走行経路から逸脱した場合、安全に停止させることができる措置を講ずることや、作業領域に第三者が侵入しないよう必要な措置を講ずること、ロボット農機であることを認識しやすい構造とするなど注意喚起機能を有すること、不正稼働や情報漏洩などのサイバー攻撃を防ぐことができるようサイバーセキュリティ対策を講ずることなどが盛り込まれている。
③では、運転開始の合図や停止方法などロボット農機の運用に係るルールを設け、使用者や補助作業者、ほ場等周辺で作業を行うその他の者で事前に打ち合わせを行って内容を周知することや、ロボット農機に接近する必要がある際はロボット農機を停止させることなどを規定している。
④では、製造者は販売者などと連携し、ロボット農機の導入主体や使用者に対し安全な使用などに係る必要な訓練を実施することとしている。
⑤では、導入主体及び使用者は、ロボット農機の使用に係る人的・物的事故や安全に関わる故障、事故になり得る状況などが発生した場合、速やかに製造者または販売者などに連絡することとしている。
■ロボット農機個別のリスクアセスメント
農業機械の種類ごとにリスクアセスメントを規定
ガイドラインの第2部では、農業機械の種類ごとにリスクアセスメントで考慮すべき危険事象や各ロボット農機固有の使用上の注意といった追加事項が種類別に規定されている。
トラクター
トラクターの使用者は、有人・無人協調システムを実施する際、自らが乗用トラクターに搭乗する場合においては転倒や転落などによる事故を防止するため、安全フレームまたは安全キャブを装着した乗用トラクターを使用するとともに、運転時にはシートベルトを着用することとしている。
リスクアセスメントにおける危険源などの同定にあたっては、ほ場内に侵入した第三者への被害や、ほ場外への暴走による使用者や補助作業者、第三者への被害、機械同士の衝突による使用者や補助作業者への被害、非定常作業時の使用者や補助作業者への被害、用途外使用等による使用者や補助作業者、第三者への被害などについて分析・評価を行う 。
茶園管理用自走式農業機械
茶園管理ロボットにおいては、ほ場内に侵入した第三者への被害、ほ場外への暴走による使用者や補助作業者、第三者への被害、非定常作業時の使用者や補助作業者への被害、用途外使用等による使用者や補助作業者、第三者への被害などについて分析・評価を行う。
田植機
田植機の使用者及び補助作業者は、苗の補植などでほ場内に立ち入る必要がある場合、田植機との接触による事故を防止するため、作業前の自動走行経路には立ち入らないこととする。また、田植機に苗補給を行う場合、田植機との接触や田植機からの転落による事故を防止するため、田植機を停止させた状態で行うこととしている。
リスクアセスメントにおいては、ほ場内に立ち入った補助作業者への被害や、ほ場外への暴走による使用者や補助作業者、第三者への被害、非定常作業時の使用者や補助作業者への被害、用途外使用等による使用者や補助作業者、第三者への被害などについて危険源や危険状態の同定を行う。
自走式草刈機
自走式草刈機の使用者や補助作業者は、監視の際に飛散物との衝突による事故を防止するため、刈取物の排出口付近には近づかないこととする。傾斜地で使用する場合は、機体の転落による事故を防止するため、斜面の下方にも注意を払う。
自走式草刈機が作業領域の外周付近を走行する際は、飛散物が作業領域外へ飛ぶ危険性を踏まえ、作業領域外にも注意を払うこととしている。
リスクアセスメントにおいては、作業領域内に立ち入った使用者や補助作業者及び侵入した第三者への被害をはじめ、作業領域外への暴走による使用者や補助作業者、第三者への被害、飛散物による作業領域外にいる使用者や補助作業者、第三者への被害、非定常作業時の使用者や補助作業者への被害、用途外使用等による使用者や補助作業者、第三者への被害などについて同定を行う。
自走式小型汎用台車
使用者及び補助作業者は、自走式小型汎用台車に荷の積載を行う場合、機体の転落による事故を防止するため機体を停止させた状態で行うこととする。傾斜地で使用する場合は、機体の転落による事故を防止するため斜面の下方にも注意を払うこととする。
リスクアセスメントにおいては、作業領域内に立ち入った使用者や補助作業者及び侵入した第三者への被害、作業領域外への暴走による使用者や補助作業者、第三者への被害、非定常作業時の使用者や補助作業者への被害、用途外使用等による使用者や補助作業者、第三者への被害などについて同定を行う。
コンバイン
コンバインの使用者及び補助作業者は、収穫物の排出作業や手刈りなどの目的でほ場内に立ち入る必要がある場合、接触による事故を防止するため自動走行を停止させた状態で立ち入ることとする。自動走行を開始する際は、ほ場内への第三者の侵入がないことを確認する。
リスクアセスメントにおいては、ほ場内に立ち入った使用者や補助作業者及び侵入した第三者への被害や、ほ場外への暴走による使用者や補助作業者、第三者への被害、非定常作業時の使用者や補助作業者への被害、用途外使用等による使用者や補助作業者、第三者への被害などについて同定を行う。
■【まとめ】早期レベル3実現に期待
クボタやヤンマー、井関など民間各社が現在実用化を進めているのは、自動化レベル2に相当する農機で、目視による監視が前提となる。トラック隊列走行のように有人機と無人機を連携させるシステムも実用化されており、作業効率化や労力低減などに効果を発揮している。
耕うんや田植えといった作業そのものを無人化する技術も別途必要なため一概には言えないが、農地は第三者の侵入を制限しやすく、その意味で導入のハードルは低い。
技術開発とともに現場における知見を重ねることで、遠隔監視型のレベル3への道も大きく開けるのではないだろうか。早期レベル3実現に期待が寄せられるところだ。
【参考】各社の取り組みについては「自動運転と農業トラクター」も参照。







の意味・読み方は?自動車業界の新潮流を示す")
ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

