

空港内への自動運転技術導入に向け検討を進める「空港制限区域内における自動走行の実現に向けた検討委員会」はこのほど、安全な自律走行に必須のインフラに求めるべき要件をまとめた「共通インフラガイダンス(案)」を作成した。
空港では、2025年のレベル4導入を目標に共通インフラや運用ルールの在り方などについて議論が進められており、2022年12月開催の検討委で共通インフラガイダンスの案が示された。各事業者が円滑にインフラを共有して利用できるよう、最低限統一すべき事項をまとめたものだ。
この記事では、これまでの検討の経緯とともにガイダンス案の内容を解説していく。
▼共通インフラガイダンス(案)|国土交通省航空局
http://www1.mlit.go.jp/koku/content/001582613.pdf
記事の目次
■これまでの検討の経緯
「共通インフラ検討WG」と「運用ルール検討WG」を設置
検討委は2019年、車両のみで対応困難な課題についてはインフラの整備や運用ルールの整備などが必要であることから「共通インフラ検討WG」と「運用ルール検討WG」の2つのワーキンググループを立ち上げ、具体的な検討に着手した。
共通インフラ検討WGでは、共通施設・設備における仕様や整備スケジュール、概算、維持管理方法をはじめ、共通情報基盤として高精度3次元地図(3Dマップ)の仕様の検討や試行、通信インフラ、航空機・GSE(航空機地上支援車両)の位置情報などの共有に焦点を当てて協議を進めてきた。
磁気マーカーや高精度3次元地図の整備・実証に着手
自己位置を推定するためのインフラとしては、磁気マーカーや看板状のランドマーク、電子的なランドマークなどさまざまな方式が想定される中、まずは2020年度に羽田空港の国内線地区で磁気マーカーの整備を実施することと、高精度3次元地図の共有化に向けた検証調査を実施することを決定した。
このほか、AeroMACS(空港用航空移動通信システム)や5Gなどを活用した通信ネットワークの増強や、カメラやセンサー、信号機の設置などによる交差点等死角箇所の情報提供、AeroMACSの活用による他車両位置把握、管制情報との連携による航空機位置把握、共用充電ステーションの整備、自動運転車両専用の通行帯・駐停車スペースの確保などについて、中長期的に検討を進めていく方針とした。
高精度3次元地図は、最低限必要と考えられる区画線、路側縁、停止線、横断歩道の実在地物と、車線中心線、交差点内車線中心線、交差点領域の仮想地物の7項目を抽出し、整備することとした。
【参考】羽田空港における実証については「SIP第2期、羽田空港地域で自動運転の実証実験がスタート!」も参照。
SIP第2期、羽田空港地域で自動運転の実証実験がスタート! https://t.co/PBwvRLt6dm @jidountenlab #自動運転 #羽田空港 #実証実験
— 自動運転ラボ (@jidountenlab) June 12, 2020
事業者の4/5が高精度3次元地図を有効と評価
実証実験参加者を対象にしたヒアリングでは、試作した高精度3次元地図について、5事業者のうち4事業者が共通インフラとして有効とし、「位置推定精度が格段に向上した」「準静的、準動的、動的情報もカバーしてほしい」「データの更新頻度・信頼性に関する情報の提供や更新データの共有方法も含め、共通化された基盤として整備してほしい」といった声が寄せられている。
このほか、磁気マーカーについては2事業者、通信インフラ3事業者、充電インフラ4事業者がそれぞれ必要と回答している。これら以外に必要なインフラとしては「空港共通のフリートマネジメントシステム(FMS)」「航空機の位置・状態検知システム」「監視カメラ・センサー」「信号機・仮想信号機」「双方向通信機」「天候情報の監視・通知システム」「基準点」「地図(2D)」「縮退走行時に安全に停止できる場所」「自動運転車両の駐車場所」が挙げられた。
【参考】空港における自動運転については「「空港×自動運転」のこれまでと今後——委員会資料から」も参照。
「空港×自動運転」のこれまでと今後——委員会資料から https://t.co/dokT7qBTde @jidountenlab #空港 #自動運転
— 自動運転ラボ (@jidountenlab) October 28, 2022
■共通インフラガイダンス(案)の概要
3Dマップや磁気マーカー、FMS、信号設備などをピックアップ
ガイダンス案では、複数事業者の利用を前提として整備するインフラ=共通インフラについて、整備する際に最低限統一しておくことが望ましいとされる項目をまとめている。あらかじめ統一した仕様を定め、これに沿ってインフラを整備することで、各事業者の利便性を図っていく狙いだ。
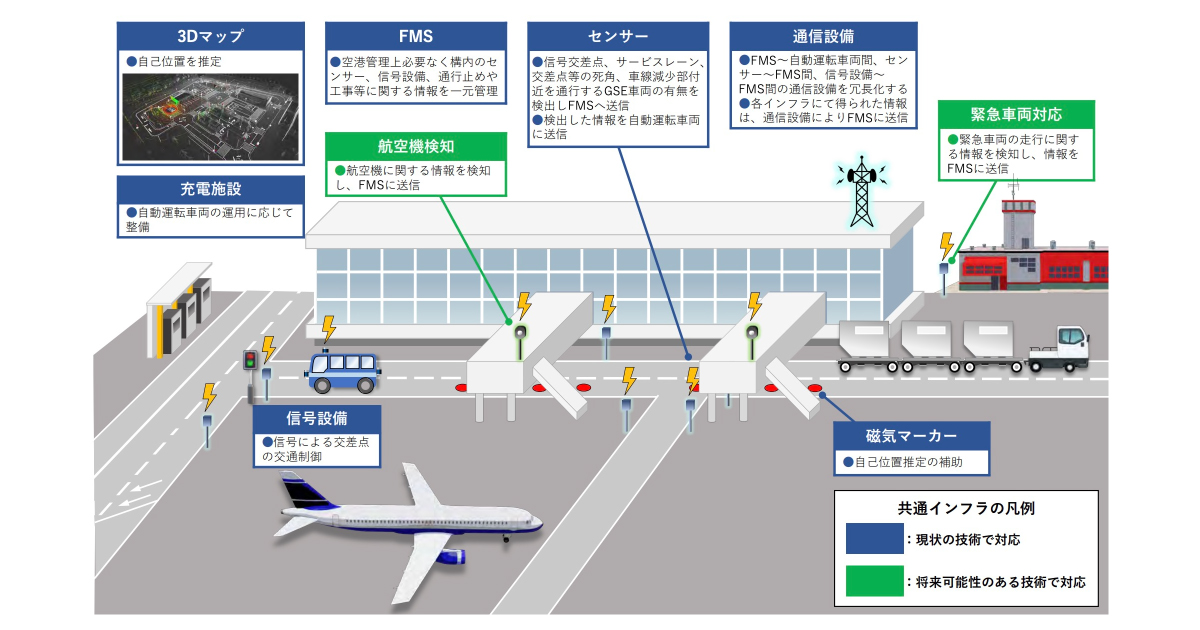
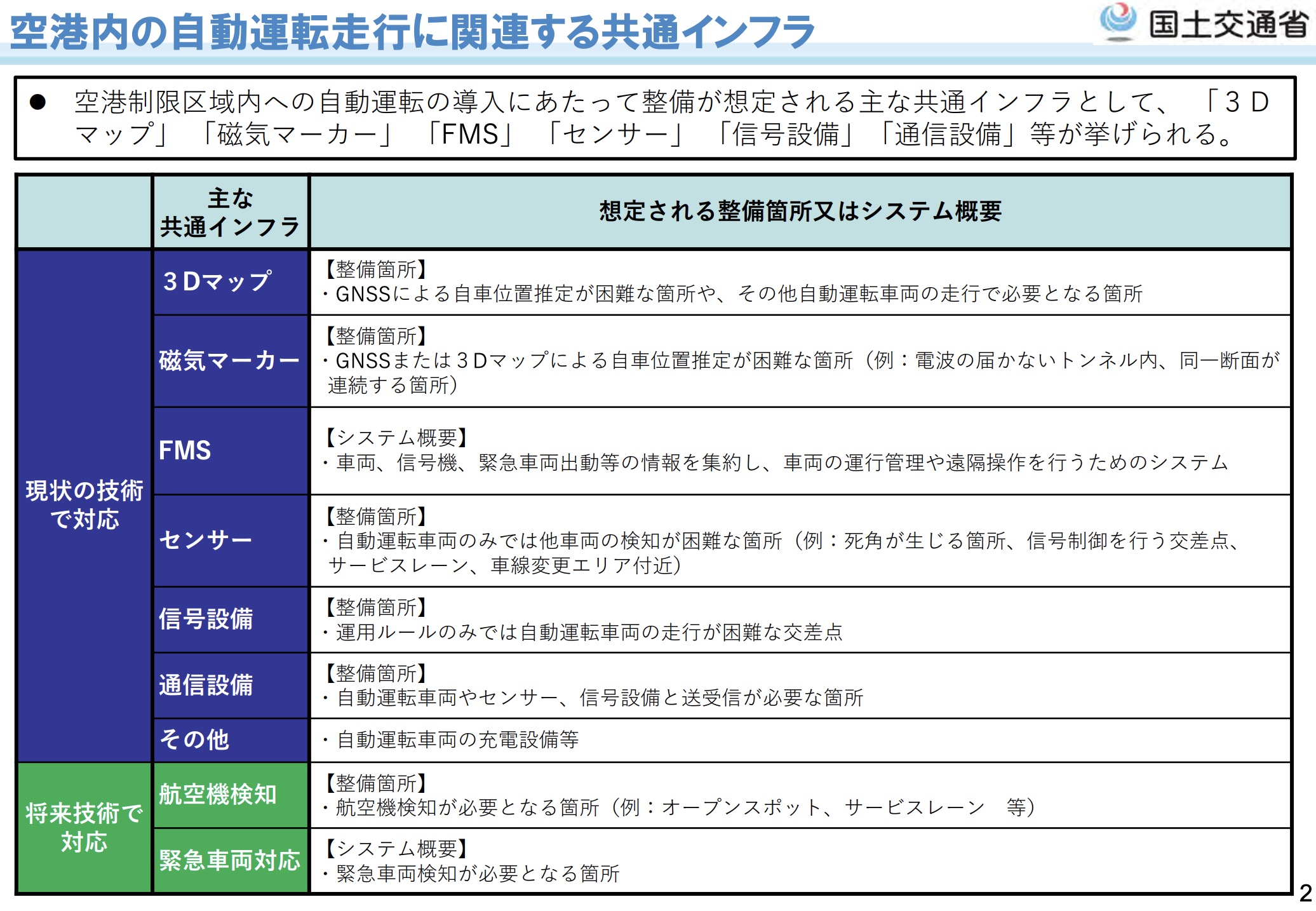
ガイダンスでは、主な共通インフラとして「3Dマップ」「磁気マーカー」「FMS」「センサー」「信号設備」「通信設備」「その他」を挙げたほか、将来技術で対応するものとして「航空機検知」「緊急車両対応」を掲げている。

3Dマップは仮想中心線や拡張性なども要件に
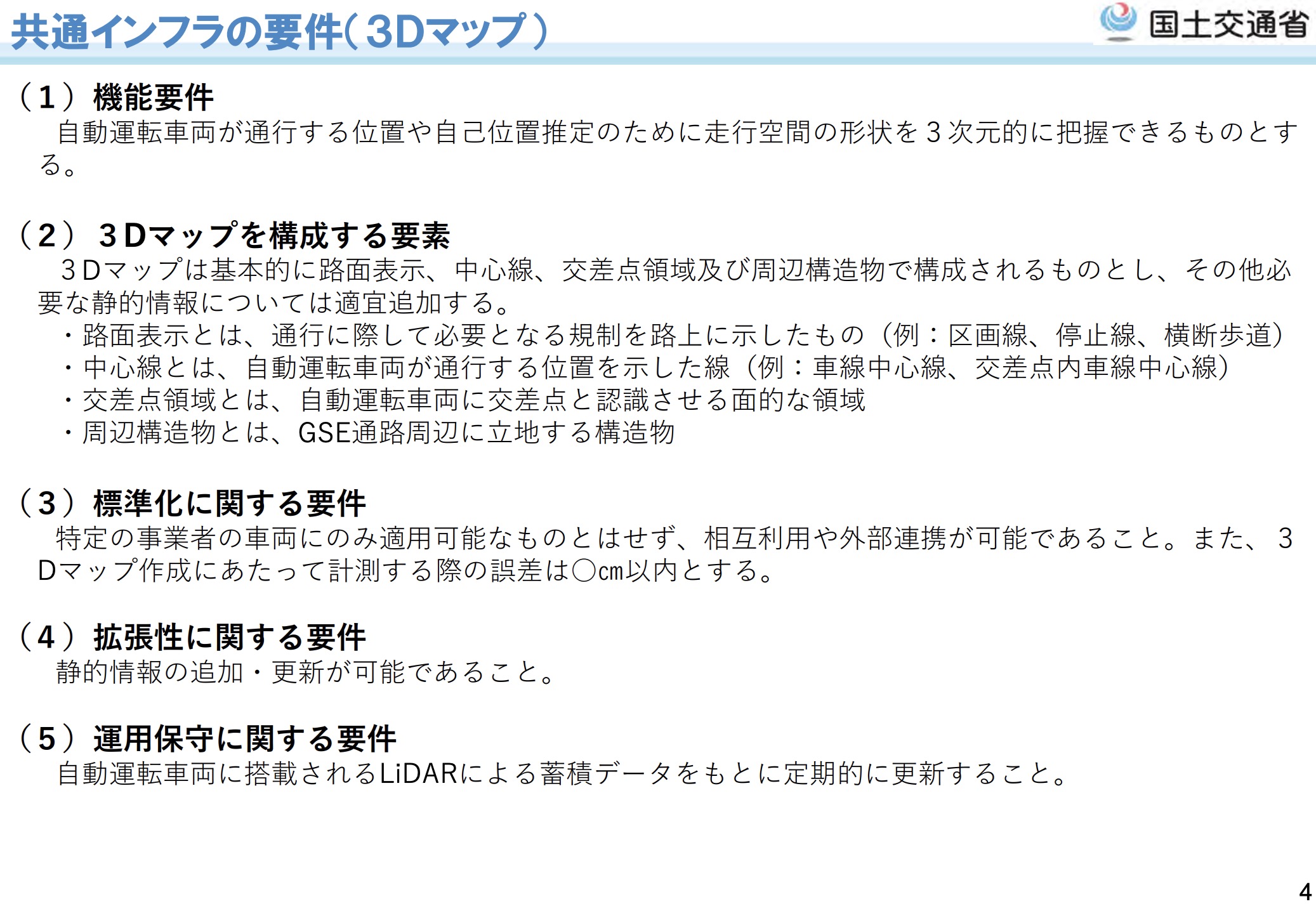
3Dマップは、GNSS(衛星測位システム)による位置推定が困難な箇所や自動運転車両の走行において必要となる箇所に整備する。自動運転車両が通行する位置や自己位置推定のため、走行空間の形状をあらかじめマッピングして3次元的に把握できるものとする。
構成要素としては、区画線や停止線、横断歩道といった路面表示をはじめ、車線中心線や交差点内車線中心線など車両が通行する位置を示した仮想の中心線、交差点領域、GSE通路周辺に立地する周辺構造物を想定している。
特定の事業者の車両のみに適用可能なものではなく、共通インフラとして相互利用や外部連携が可能であることや、作成にあたって計測する際の誤差についても「○センチ以内」などと定める。
静的情報の追加・更新が可能であるなど拡張性があり、その他必要な静的情報を適宜追加できることや、自動運転車両に搭載されるLiDARをベースにした蓄積データをもとに定期的に更新することとしている。
磁気マーカーは形状や性能などを規定
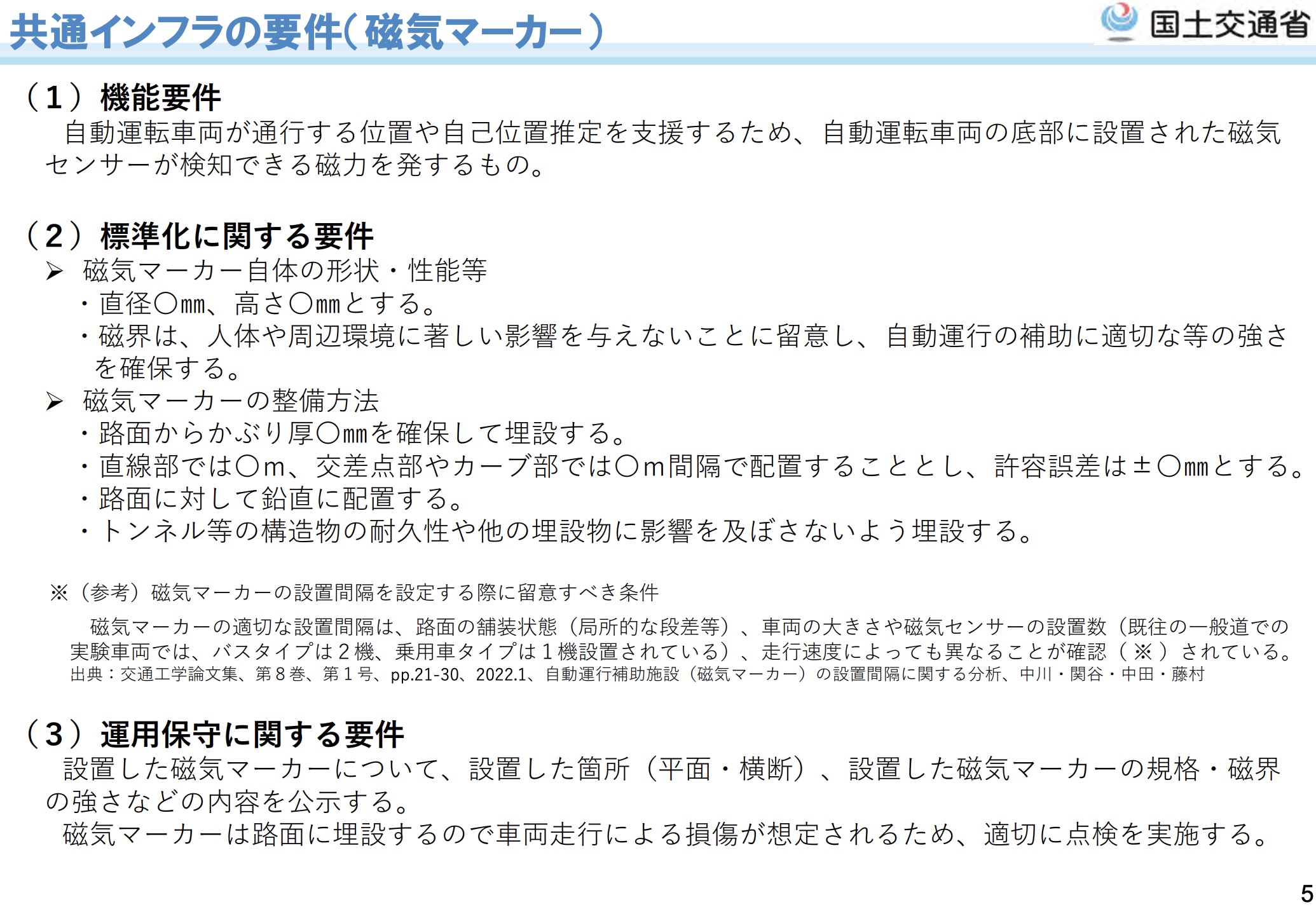
磁気マーカーは、位置特定を支援するため自動運転車両の底部に設置された磁気センサーが検知できる磁力を発するもので、形状については「直径〇ミリ、高さ〇ミリ」などと定めることとする。磁界は、人体や周辺環境に著しい影響を与えないことに留意し、自動運行の補助に適切な強さを確保する。
整備方法については、路面からかぶり厚〇ミリを確保して埋設することや、直線部では〇メートル、交差点部やカーブ部では〇メートル間隔で配置することとし、許容誤差は±〇ミリとすること、路面に対して鉛直に配置すること、トンネルなどの構造物の耐久性や他の埋設物に影響を及ぼさないよう埋設することとしている。
設置した磁気マーカーは、設置した箇所(平面・横断)や磁気マーカーの規格・磁界の強さなどの内容を公示することとし、路面に埋設するため車両走行による損傷が想定されるため、適切に点検を実施する。
FMSは車両の運行管理や遠隔操作機能も必須に
FMSは、自動運転車両の走行に必要な情報を集約し、車両の運行管理や遠隔操作を行うためのシステムを有することとする。
取り扱う情報は、3Dマップや信号情報(信号機の位置、灯光と表示残時間)、通行止め情報、工事情報、緊急車両情報、各種センサーが検出した情報、自動運転車両の情報(位置・走行方向等)などとし、その他必要な情報を適宜追加していく。
このほか、3Dマップ同様相互利用や外部連携が可能であることを求める。運用保守面では、特に動的情報については収集したタイミングでリアルタイムに更新することと、定期保守を行うことを求める。

交差点などに設置するセンサーの要件も規定
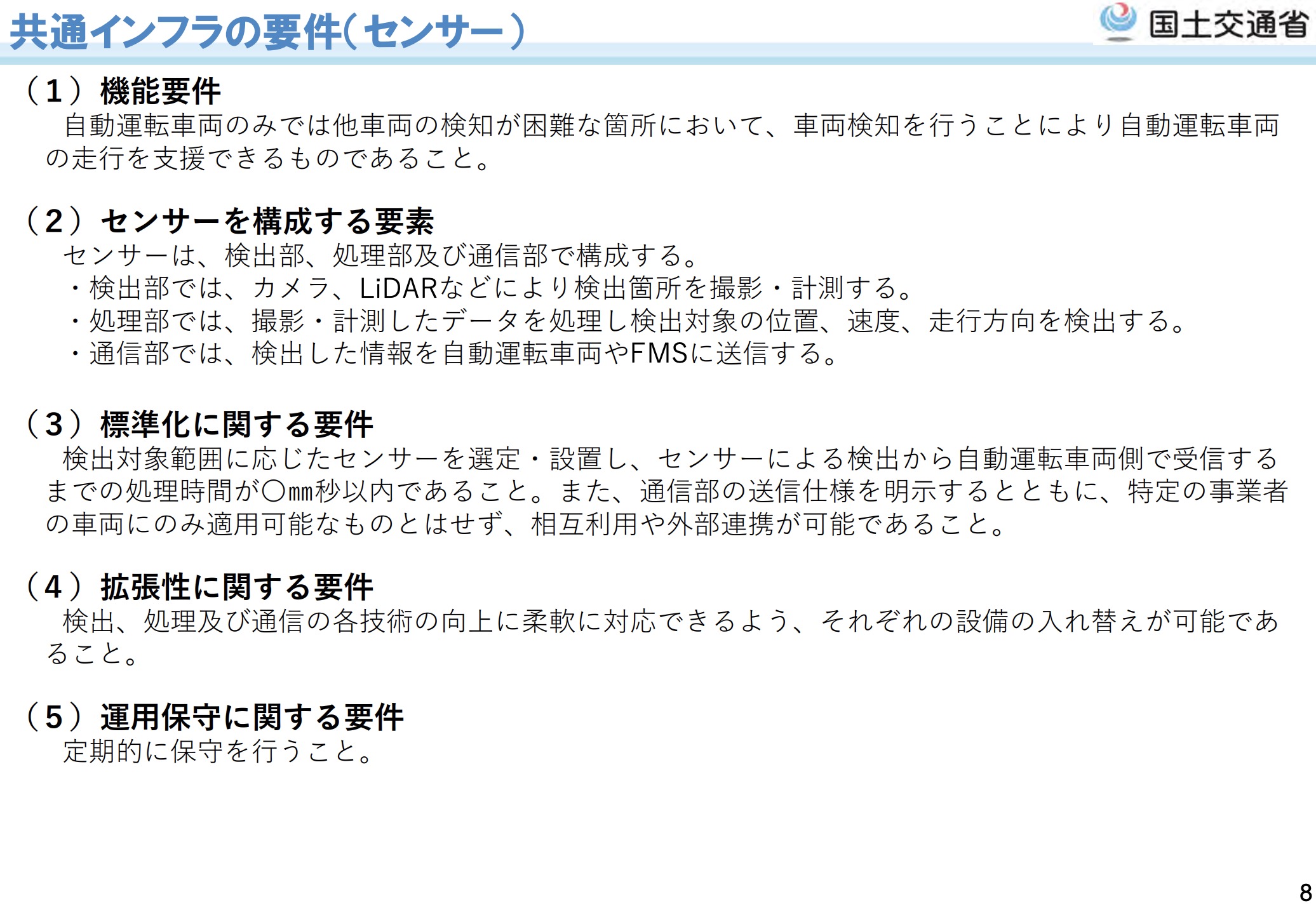
インフラに設置するセンサーに関しては、自動運転車両のみでは他車両の検知が困難な箇所において、車両検知を行うことで自動運転走行を支援できるものであることとする。
センサーは検出部、処理部、通信部で構成され、検出部ではカメラ、LiDARなどで検出箇所を撮影・計測する。処理部では、撮影・計測したデータを処理し、検出対象の位置、速度、走行方向を検出する。通信部は、検出した情報を自動運転車両やFMSに送信する。
標準化に関しては、検出対象範囲に応じたセンサーを選定・設置することとし、センサーによる検出から自動運転車両側で受信するまでの処理時間が〇ミリ秒以内であることなどを求める。また、通信部の送信仕様を明示し、特定の事業者に限らず相互利用や外部連携が可能であることとする。
拡張性に関しては、検出や処理、通信各技術の向上に対応できるよう、各設備の入れ替えが可能であることとする。その他、定期的に保守を行うこととしている。
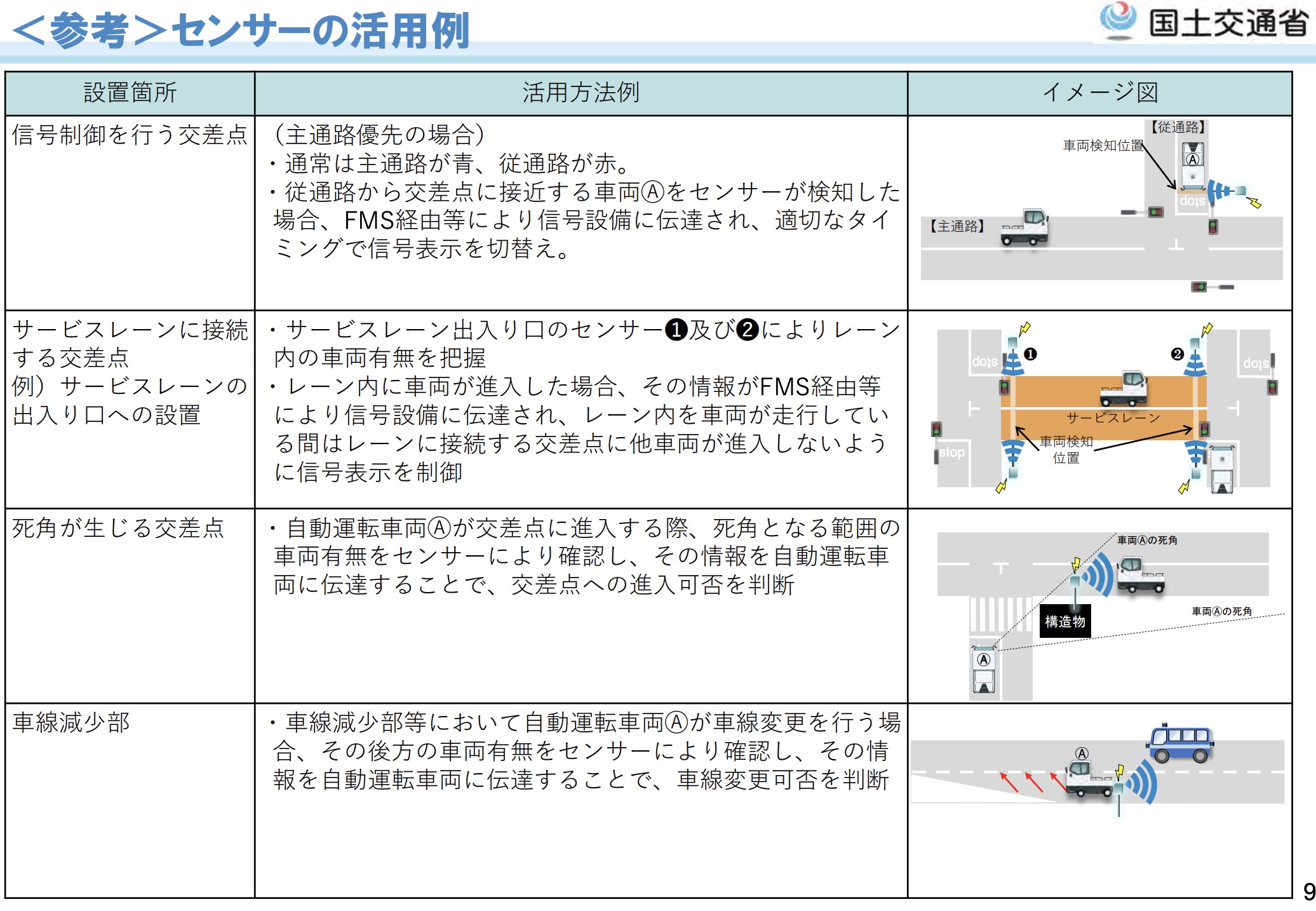
センサーの活用例としては、信号制御を行う交差点やサービスレーンに接続する交差点、死角が生じる交差点、車線減少部などを想定している。交差点やレーン内、死角などの他の車両を検知し、必要に応じてFMSを通じて信号を制御したり自動運転車に通知したりするイメージだ。
■【まとめ】ガイダンスは2024年までに正式に作成
共通インフラ検討WGは今後、共通インフラの優先度・必要時期の検討などニーズを整理し、実証を通じた有効性検証や作成基準、性能要件、設置基準の検討などをさらに進めていく。共通インフラガイダンスは、2025年中の自動運転レベル4導入に向け2024年までに作成する方針だ。
空港制限区域内では、ランプバスやトーイングトラクターをはじめ、滑走路の除雪や旅客搭乗橋に至るまで自動運転化を図る取り組みが進められている。
本格導入される2025年まで残すところ2年。より具体化した実証の進展に期待したい。
【参考】関連記事としては「自動運転と空港」も参照。
とは?いつ実現?")

とは?搭載する自動車の車種は?自動運転ではない?")




の意味・定義・読み方は?自動車業界の新潮流を示す")
ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

