

自動運転ソフトウェアの先行開発を手掛けるトヨタ子会社のトヨタ・リサーチ・インスティテュート・アドバンスト・デベロップメント株式会社(本社:東京都中央区/CEO:ジェームス・カフナー)は2020年3月10日、自動運転用の高精度な一般道マップの生成に関する実証実験に成功したことを発表した。
自動運転向けの高精度地図の作成は、これまでは高速道路が主な対象だった。もちろん高速道路だけではなく一般道の高精度地図の作成も取り組まれてきたが、高速道路よりはるかに総延長が長い一般道の場合は、作成効率が良い方法やコストが安く済む方法を編み出す必要があるとされてきた。
トヨタの今回の発表によれば、衛星や一般車両から得られる画像データを使うことで、専用の計測車両を使用しなくても一般道の高精度地図の作成が可能になることが、実証実験を通じて確認できたという。トヨタは作成コストや維持コストの大幅な削減や更新期間の短縮ができると説明している。これは大きな前進だ。
報道発表によれば、オランダの地図データ大手TomTomと新たに実証実験を実施し、TRI-ADの自動地図生成プラットフォームである「Automated Mapping Platform」(AMP)の車両データを変換し、TomTom独自のアルゴリズムを活用して入力することで、高精度な一般道地図の生成と更新に成功したという。
また、オランダの地図データ大手HERE Technologiesとも共同で実証実験を行い、車線データを含む一般道の高精度地図データの作成に成功したようだ。作成にあたっては、TRI-ADの車両データ位置の誤差をHEREの高度セルフヒーリング技術で補正する仕組みを導入したという。トヨタは報道発表で「車両データをHERE Platformに入力することで、HERE独自のアルゴリズムで高精度の一般道地図を自動生成することができます」としている。
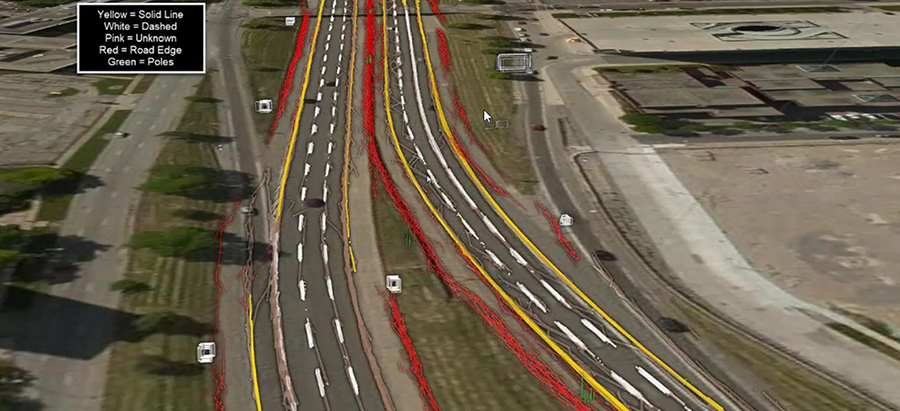
■自動運転車は「センサー×地図データ」で安全走行
いま私たちが運転している自動車では運転手が主に目をセンサーとして使い、その都度状況を判断しながら安全な運転動作を連続的に行う。一方で自動運転車の場合は、LiDARやカメラなどのセンサーと地図データを組み合わせて走行させる方法がいまのところ主流となっている。
TRI-ADのAutomated Driving Strategy and Mapping部門でバイスプレジデントを務めるマンダリ・カレシー氏は、これまでに実施しているマクサー・テクノロジーズやNTTデータなどとの実証実験の成果についても触れつつ、「人々にとって自動運転がより安全で身近な技術となる未来にまた一歩近づきました。さらに精度を向上させるため、今後もパートナー企業との連携を進めて参ります」としている。
【参考】関連記事としては「【最新版】自動運転向けダイナミックマップの開発企業まとめ 地図データ作製の進捗は?」も参照。







の意味・読み方は?自動車業界の新潮流を示す")
ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

