

米半導体大手エヌビディアは2019年3月21日までに、自動運転車を衝突から守るためのドライビングポリシー「DRIVE AV Safety Force Field」(SFF)について発表を行った。
同社は報道発表で「シミュレーションで検証済みの安全運転決定アルゴリズムが、予測不可能な現実世界の交通から車両と道路利用者を守る」と強調しており、車両と乗員、歩行者などの道路利用者を守るために役立つとしている。
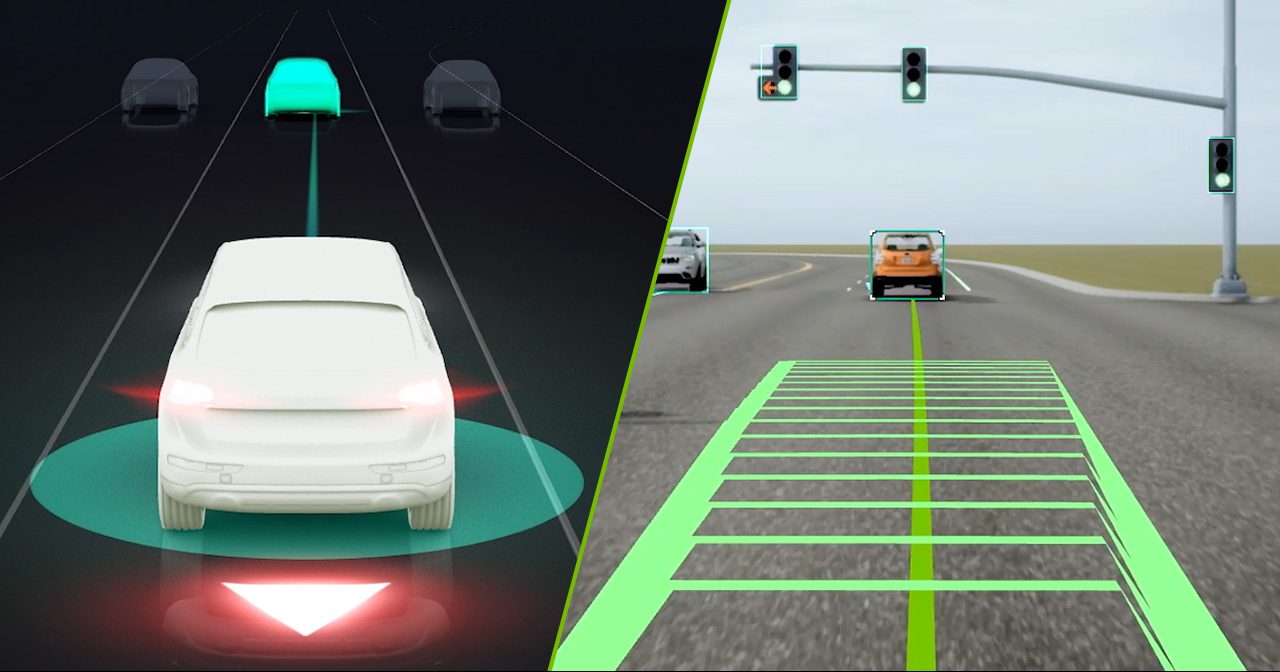
発表によれば、今回発表したSFFは車両に設置されたセンサーから得たデータを基に周辺環境のダイナミクスを分析し、それに合わせて自動運転車の行動を決定するというもののようだ。
米運輸省道路交通安全局(NHTSA)は過去に自動車の衝突の約94%はヒューマンエラーによるものという調査結果を発表している。エヌビディア社はプレスリリースで「SFFを搭載した自律走行車は、まるで反発する磁石のように自らを危険から遠ざけつづけ、また自らが危険な状況を作り出す一因にもならないよう設計されている」と強調している。
【参考】関連記事としては「エヌビディア(NVIDIA)の自動運転戦略まとめ 半導体開発や提携の状況は?」も参照。
大手メーカーと軒並み提携…エヌビディアの自動運転戦略まとめ 半導体事業核にプラットフォーマーに AI開発にも注力、トヨタ自動車も技術採用 https://t.co/GIfFt9J4OS @jidountenlab #エヌビディア #自動運転 #半導体
— 自動運転ラボ (@jidountenlab) December 3, 2018







の意味・読み方は?自動車業界の新潮流を示す")
ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

