

自動運転に必須の技術と言われる高精度地図。自動運転車は、LiDAR(ライダー)などを使って3次元マッピングした地図データと常に交信することで自車の安全性をより高めている。
しかし、自動運転開発企業の中には、この高精細地図がなくとも自動運転を可能とする技術開発を進める強者がいる。
果たして、高精度地図は本当に必要ないのか。どのような技術でそれを可能にするのか。「いらない派」にスポットを当て、その自動運転技術を追いかけてみた。
記事の目次
■自動運転における高精度地図の役割
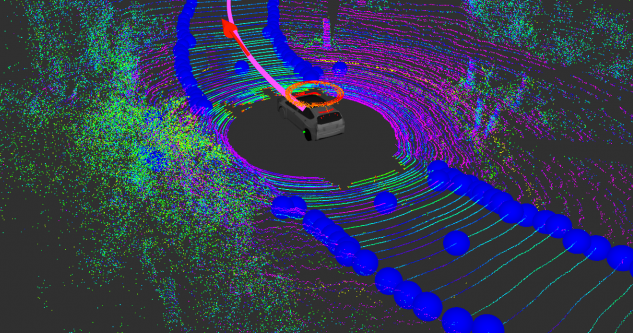
一般的に、自動運転車は搭載したカメラやLiDARなどのセンサー類で周囲の状況を認知し、他の車両や歩行者、街路樹、車線などを区別して解析した上でどのように車両を制御するか判断を下す。その際、精密な道路情報や信号・街路樹などの位置情報を備えた高精細地図とセンサーが検知した情報を突合することで、より正確に自車位置を特定することが可能になる。また、悪天候時などセンサー類のパフォーマンスが落ちた際にも効果を発揮する。
さらに、渋滞状況や一時的な走行規制、落下物や故障車といった準動的情報や、信号現示情報、交差点内歩行者・自転車情報、交差点直進車情報など、1秒単位での更新頻度が求められる動的情報など、V2V(車車間通信)やV2I(路車間通信)によってリアルタイムに付加していくことで、より利便性や安全性を高めることが可能になる。
【参考】V2Vなどの通信方法については「自動運転とデータ通信…V2IやV2V、5Gなどの基礎解説」も参照。
自動運転とデータ通信…理解必須の4大規格、基礎解説&まとめ AIやLiDARが膨大な情報生成、自動車イノベーションの鍵握る|自動運転ラボ https://t.co/Tbo2uSLgPW @jidountenlab #自動運転 #データ通信 #4大規格
— 自動運転ラボ (@jidountenlab) October 7, 2018
■いらない派①アセントロボティクス:AI教育環境「ATLAS」であらゆる状況に対応
東京を拠点に自動運転車や産業用ロボットに向けたソフトウェア開発を行っているアセントロボティクス。卓越したAI技術が最大の持ち味で、必要最小限のデータからAIの学習に必要となる膨大なデータをシミュレーション環境内で生成し、現実世界に対応可能なAIを開発する。
開発を進める自動車・産業用ロボット向けのAI教育環境「ATLAS」は、VRヒューマンインターフェイスやGAN (Generative Adversarial Network)技術を活用したシミュレーション環境、AIアルゴリズムを統合し、効率的なAIの教育を可能にしている。
シミュレーターベースで学習が可能なため、膨大な実データを必要とせず、スピード・コストの観点で優位性を持つほか、AIがタスクの意図を獲得できるワンショットラーニングや効率的な模倣学習などを実現しており、未知の物体や道路環境にも対応可能なシステムとして構築を進めている。
このため、ATLASを活用した完全自動運転は3次元高精細地図を必要とせず、初めての場所や、どのような地域・状況下においても、周辺を検知するセンサーのデータを基に状況を総合的に判断しながら走行することが可能という。
かいつまむと、処理スピード・能力に優れた優秀なAIを活用することで、高精度地図による補完を要せずセンサー類の検知・解析だけで迅速に車両を制御するシステムだ。
【参考】アセントロボティクスについては「【最新版】アセントロボティクスとはどんな会社? AIで自動運転実現目指すスタートアップ」も参照。
気になるアセントロボティクスの「AI×自動運転」情報をまとめ 優秀なエンジニア集う注目スタートアップ、大型資金調達も https://t.co/6chjSftys1 @jidountenlab #アセントロボティクス #AI #自動運転
— 自動運転ラボ (@jidountenlab) November 16, 2018
■いらない派②マサチューセッツ工科大学:TRIと共同開発、MapLite技術で道路を検出
優秀なスタートアップの卵たちが研究に没頭するマサチューセッツ工科大学(MIT)のコンピュータ科学・人工知能研究所(CSAIL)は、GPSとLIDARにより高精度地図データがない道を走行可能な自動運転車の開発を進めている。
「MapLite」と名付けられたこの技術は、GPSで自車位置を特定しながら、LiDARなどのセンサーで進行方向や周辺の物体を検知・解析し、走行可能な道路を検出するという。
MapLiteの開発には、トヨタ自動車の自動運転開発会社「トヨタ・リサーチ・インスティテュート(TRI)」も共同で研究を進めている。
■いらない派③アップル:外部データ不要の自動運転ナビゲーションシステムで特許取得
次世代モビリティに関する数々の特許を取得している米アップル。その中でも、2017年末に米特許商標庁に登録された特許「Autonomous Navigation System(自動運転ナビゲーションシステム)」は、外部データを一切必要としない自動運転システムのようだ。
常に更新しなければならない高精度地図のリスクやコストを排除し、車両に搭載したセンサー類とプロセッサによるリアルタイムな認識・解析技術で車両をナビゲーションすることができる技術のようだ。
【参考】アップルの自動運転戦略については「2019年、Appleは自動運転領域のゲームチェンジを目論むのか?」も参照。
2019年、Appleは自動運転領域のゲームチェンジを目論むのか? https://t.co/4gZnQjRhbW @jidountenlab #自動運転 #Apple #リンゴはいつ熟すのか
— 自動運転ラボ (@jidountenlab) January 10, 2019
■いらない派④WaveSense:通常の高精度地図とは一線を画す地中マッピング技術
番外編的要素が強いが、米スタートアップ企業WaveSenseは、通常の高精度地図とは異なるアプローチで自動運転開発を進めている。それは、地中をマッピングする方法だ。
自社開発の地中レーダー(GPR)により、地下の地形を路面の最大10フィート(約3メートル)下までスキャンしたベースラインマップを作成する。これと車載センサーからのデータを組み合わせることで地中のさまざまな状況を反映したマップを作成し、路上での車両の位置特定をリアルタイムで維持するという仕組みだ。
刻々と変化する地上に比べ地中は安定しており、ダイナミックマップのように動的情報を逐一入手する必要はない。荒天などの影響も受けにくい。
マップを必要とする仕組みだが、高精度地図とは一線を画すものとして番外編とした。
【参考】WaveSenseの取り組みについては「アメリカのスタートアップWaveSense、悪天候時の自動運転走行に有効な地中センサー・レーダーを発表」も参照。
斬新!直下の地中データ照合し、AI自動運転車の位置特定 軍事向け技術、深さ3メートルまでセンシング 米スタートアップがイノベーション牽引|自動運転ラボ @jidountenlab https://t.co/4qLc0o8aJb #地中レーダー #斬新アイデア #自動運転 #軍事向け技術
— 自動運転ラボ (@jidountenlab) August 26, 2018
■自動運転レベル5でいらない派が主流に?
いらない派は、基本的にはセンサーやAIによる解析・判断能力・スピードを格段に向上させることにより自動運転を成し遂げようとしているようだ。これが実現すれば、高精度地図にかかる手間やコストを別のシステムに振り分けることもできる。
極論を言えば、それは人間による運転と同じ能力をAIなどが備えることを意味する。悪天候や道なき道でも解析・判断する能力が備われば、自動運転レベル5の実現が一気に身近なものとなろう。
ある種の理想論と言ってしまえばそこまでだが、LiDARやAIはまだまだ開発途上にある技術のため、現段階で天井を語るべきではない。自動運転レベル4技術が確立し、レベル5の開発が加速する頃にはこちらが主流になっている可能性は十分考えられるだろう。
【参考】ダイナミックマップについては「【最新版】ダイナミックマップとは? 自動運転とどう関係? 意味や機能は?」も参照。
自動運転AIの羅針盤…ダイナミックマップ完全解説&開発進捗まとめ トヨタ自動車や日産なども軒並み出資、イノベーション支える必須データ|自動運転ラボ https://t.co/v2RgYWhShp @jidountenlab #自動運転 #羅針盤 #新たな地図
— 自動運転ラボ (@jidountenlab) September 23, 2018
とは?いつ実現?")

とは?搭載する自動車の車種は?自動運転ではない?")




の意味・定義・読み方は?自動車業界の新潮流を示す")
ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

