

自動運転車の自己位置の特定には、大きく分けて3つの手法がある。「電磁誘導線等」型と「高精度GPS」型、そして「高精度3次元地図」型だ。ただこれらにはそれぞれ弱点ともなり得る課題があると言われている。
国土交通省がウェブサイトで公表している資料(http://www.mlit.go.jp/common/001294006.pdf)を基に解説していく。
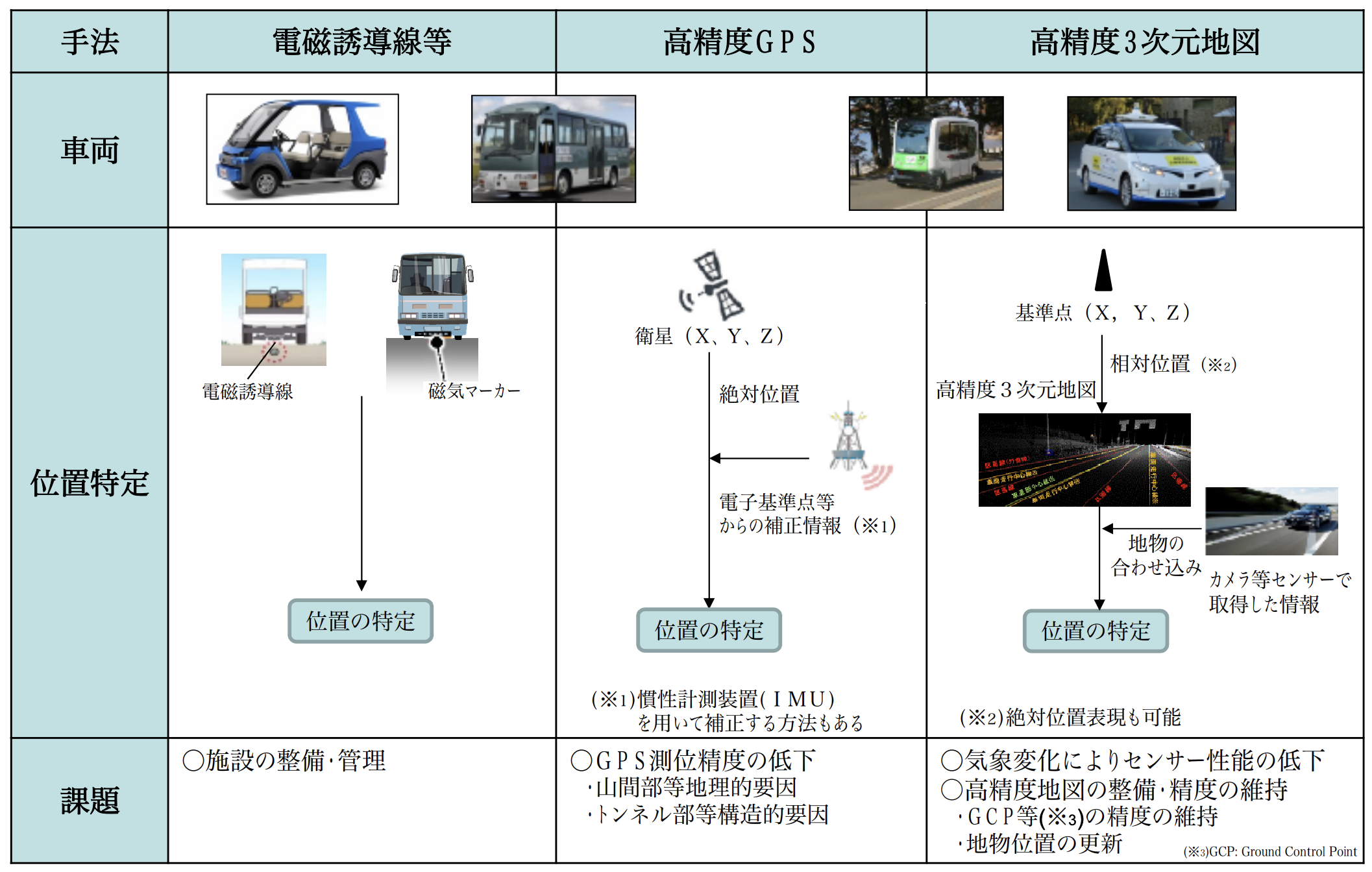
■「電磁誘導線等」型の弱点
この手法では、道路に敷設した電磁誘導線と車両の下部に設置した磁気マーカーを使って、自動運転車の位置を特定しようというものだ。
ただ課題となるのは整備や管理で、全国の全ての道路に電磁誘導線を敷設するのは簡単ではない。一方で限定された道路ではこの手法が採用しやすいだろう。
■「高精度GPS」型の弱点
この手法では、衛星と電子基準点などからの補正情報、もしくは慣性計測装置(IMU)を使った補正で車両の位置を特定する。
課題とされるのは、山間部などの地理的な要因やトンネルなどの構造的な要因でGPSの測位精度が低下することだ。
■「高精度3次元地図」型の弱点
ダイナミックマップとも呼ばれるこの手法では、車両に取り付けたセンサーから得られる情報を活用して位置を特定するというものだ。
ただ気象の変化などによってセンサー性能が低下する可能性があるほか、高精度地図の情報を常に更新しなければいけないなどの課題がある。
■どの手法が主流に?
3つの手法にはそれぞれこうした弱点や課題があり、現在はスタートアップ企業を含めた各社が独自に方向性を模索している段階だ。各社が手掛ける技術の開発状況に今後も注目していきたい。
【参考】関連記事としては「衛星・GPSはもう要らない?非依存型で自動運転を可能に」も参照。
衛星・GPSはもう要らない?非依存型で自動運転を可能に オランダのベンチャー企業が発表 https://t.co/xreVUL89hG @jidountenlab #GPS #自動運転 #不要
— 自動運転ラボ (@jidountenlab) June 17, 2019


とは?いつ実現?")




の意味・読み方は?自動車業界の新潮流を示す")
ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

