


自動運転開発各社が技術を競い合っているAI(人工知能)技術。センサーが取得した画像データ内のさまざまな物体を正確に検出・解析し、自動運転車の制御を判断する重責を担う。自動運転システムの核となる技術だ。
このAI能力の技術レベルを判断するには、交差点における走行能力を比較するとわかりやすいそうだ。各自動運転システムがどのような手法で交差点における自律走行を可能にしているのか、その手法を紐解くことでAI技術のレベルを知ることができるというのだ。
言い換えれば、高度な自動運転システムを実現し、交差点を制覇すれば自動運転を制すということになる。それだけ交差点が重要なのだ。
今回は、自動運転開発においてなぜ交差点対策が重要なのか解説していこう。
記事の目次
■交差点の特徴
運転において、最も注意を必要とするスポットの一つが交差点だ。これは、交通事故の発生状況においても裏打ちされている。
警察庁発表の2017年中の交通事故の発生状況によると、同年の交通事故発生件数は47万2165件で、このうち交差点関係が計25万5356件と全体の54.1%を占めている。
内訳では、環状交差点内が6件(構成率0%)、信号機のある交差点内が7万6078件(同16.1%)、信号機のない交差点内が11万4452件(同24.2%)、環状交差点付近が18件(同0%)、交差点付近が6万4802件(同13.7%)となっている。
交通事故の過半数が交差点付近で発生しており、若干の差はあれこうした傾向は大半の国で共通しているようだ。
では、なぜ交差点で事故が多発するのか。交差点は2本以上の道路が交わる場所であり、あらゆる方向へ自動車が行き交うほか、歩行者らが横断歩道を介して道路を横断する場所でもある。人、自転車、自動車など、異なる移動主体が複雑に交差するスポットなのだ。
通行量が多い場所では、円滑な交通制御や安全向上のため信号機や歩道橋などが設置されているが、それでも事故が発生してしまうのが実情だ。
■自動運転における交差点
自動運転の開発においては、こうした交差点における自律走行技術が非常に重要となる。交通事故の過半数を占める交差点を抑えておかなければ、安全を担保することができないからだ。
一般的な自動運転技術は、道路の高精度3次元マップとセンサーが取得した画像データを基にしたAIによる解析・判断、V2V(車車間通信)やV2I(路車間通信)などの通信技術で構成されている。
交差点では、信号情報や周辺の歩行者・自転車の挙動情報、車列や周辺の車両の走行情報などを、交差点付近に設置した各種センサーが周囲を走行する車両に配信するV2Iをはじめ、信号や車線、交通標識などを網羅した高精度3次元マップなどの情報、車載センサーが検知した情報をもとに、AIが自動車の挙動を制御する。
高精度3次元マップの作製に課題
ここで一つの課題が浮き彫りとなる。高精度3次元マップの作製だ。すでに開発・実用化が進められている高速道路におけるマッピングは、速度などの標識や車線の変化が少なくマップ化しやすい環境にあるが、一般道において複数の道路が交わる交差点は、停止線や歩行者用を含む信号情報、各方向の標識、進行が可能なすべての方向に向けた仮想走行線など情報は膨大で、その一つひとつをタグ付けしていかなければならない。
このタグ付け・ラベリングは確認を含め基本的に手作業で行われる。全国に何百万カ所と点在する交差点を手作業で網羅するには、コストや労力、時間がどれだけ必要になるか。また、こうした情報を定期的に見直し、微々たる変化もマップに反映させなければならないため、開発と維持の手間を考えると、ため息どころか魂が抜けてしまいそうになる。
それゆえ、どこまでの情報を高精度3次元マップに盛り込むべきかを考慮するとともに、ラベリングを含む効率的なマッピング技術の開発も必要不可欠となる。
別の観点では、車載センサーとAIの進化によってその精度や効率を高めることもできそうだ。センサーが交差点のあらゆる情報を的確に読み取り、その情報をもとにAIが効率的に解析・判断を下すシステムが完成すれば、情報インフラとなる高精度3次元マップの負担を減らすことが可能になるのだ。
■NVIDIAの取り組み
AIベースのDNNのみで自動運転実現へ
半導体大手の米NVIDIAは、交差点におけるさまざまな情報を手動でエンコードする労力と、工事など一時的な変化への対応を背景に、高精度3次元マップに頼らずAIベースのディープニューラルネットワーク(DNN)のみで自動運転を実現する技術開発を進めている。
自動運転システムのみで走行可能な技術を完成させることで、マッピングにかかわるコストの低減をはじめ、自動運転車が走行できるODD(運行設計領域)の拡大に直結させることが可能となるため、ハードルは上がるものの自動運転車化に向けた一つのアプローチとして要注目の技術開発だ。
NVIDIAは、自律走行車が停止して待機(Wait)しなければならない諸条件を検出する「WaitNet DNN」でシーンベースの検出と分類を行う手法を採用。通常とは異なる場所にある一時停止標識や信号機、車線境界線などさまざまな特徴によってシーン全体を認識し、交差点の有無や種類を検出する仕組みで、人間が視覚的に交差点を検出する方法と類似したアプローチとなっている。
つまり、マップにおける「ここは交差点です」といった情報なしに、道路上のさまざまな特徴を構造的に解析して交差点を認識する仕組みだ。
高精度3次元マップに依存せずに
このシステムにより高精度3次元マップに依存することなく、また一時停止の標識など一部の検出に失敗してもフォローしやすい環境を構築できる。検出精度・汎用性が高まれば、さまざまな交差点パターンに対応可能となり、ODDを飛躍的に広げることが可能になりそうだ。
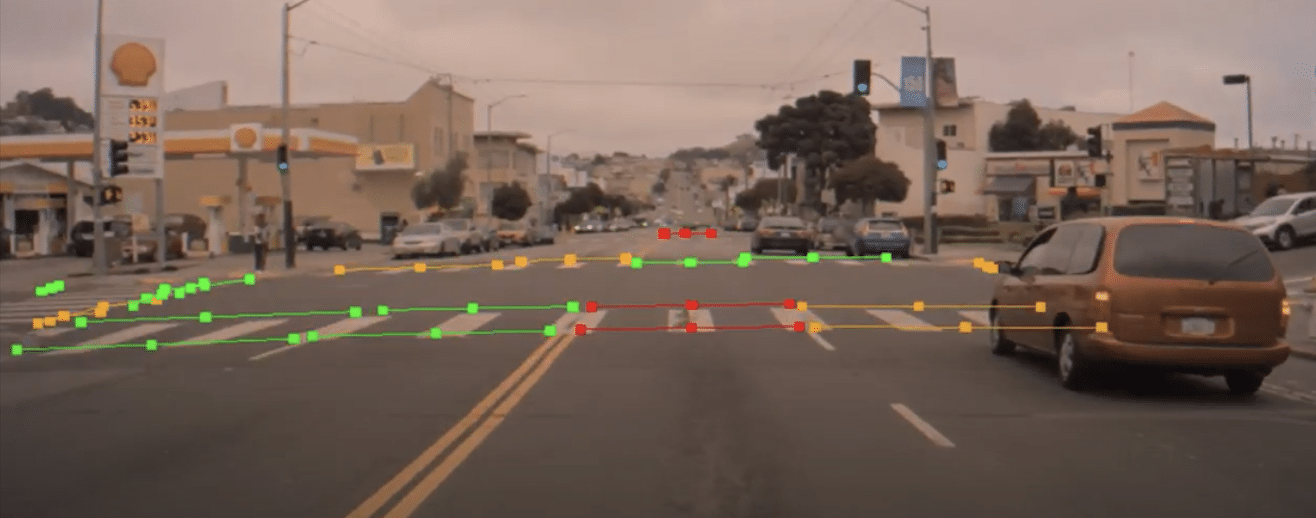
最新の発表では、交差点の構造を点の集まりとして予測できる機能を紹介している。自車両や他車両における交差点への進入点や退出点、横断歩道の始点・終点など構造の特徴をそれぞれ検出して分類し、交差点において自動運転車が進行可能なすべてのルートを示すことを可能にしている。
この交差点構造予測機能は、WaitNet DNNの追加項目として、DRIVEソフトウェアの一部として提供していく予定という。
【参考】高精度3次元地図の要否については「3D地図「いる派vsいらない派」 自動運転業界の仁義なき戦い ダイナミックマップは必要?」も参照。
3D地図「いる派vsいらない派」 自動運転業界の仁義なき戦い 次世代自動車向け、AIの活用方法に違い https://t.co/jn0UrtgPSG @jidountenlab #自動運転 #地図 #仁義なき戦い
— 自動運転ラボ (@jidountenlab) February 18, 2019
■【まとめ】レベル5ではマップなし自動運転が主流に?
NVIDIAのように、マップに依存することなく自動運転システムのみで自律走行を可能にする技術は一つの理想だが、世界各国で開発が進められているすべての自動運転システムがこの手法に切り替わらない限り、高精度3次元マップの必要性は損なわれない。
現実的には、自動運転レベル4開発においては一定品質の高精度3次元マップがベースとなり、それに依存しなければならない自動運転システムが主流となる。
技術が高まり、レベル5に近づけば近づくほどマップに依存することなく独立して自律走行を可能にする自動運転システムのシェアが高まっていくものと思われる。マップなし自動運転は将来に向けた技術と言えそうだ。もちろん、マップと組み合わせることでより高精度な自律走行が可能になるのは言うまでもない。
こうした高度な自動運転技術が試されるのが、道路上において最も注意を要する交差点なのだ。そう遠くない将来、「交差点を制するものが自動運転を制す」という格言が生まれるかもしれない。
【参考】関連記事としては「自動運転AI、常識破りの「教師なし学習」による超進化」も参照。
とは?いつ実現?")






の意味・定義・読み方は?自動車業界の新潮流を示す")
ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

