


NEXCO中日本とNECは2023年7月31日までに、除雪車の「梯団(ていだん)走行」の自動運転化に向けた技術開発に共同で着手したことを発表した。2024年度内を目標に、自動運転技術や車間距離の保持技術の完成を目指し、試験走行や検証などを行う計画だという。
■「梯団走行」での除雪を自動化へ
高速道路の除雪作業は、安全な走行環境の確保に必要不可欠だ。NEXCO中日本では、吹雪による視界不良などの悪条件において、除雪車の梯団走行により複数車線の除雪作業を行っているという。梯団走行とは、複数の車両が斜めに並んで走行することをいう(なお、複数の車両が同じ車線を縦に並んで走行することを「隊列走行」という)。
梯団走行の除雪作業では、除雪車の先頭車両と後続車両が一定車間距離を保ちながら、前面に装着した排雪板を少し重ねて走行する必要がある。そのため除雪車1台につき熟練した運転技術を有する者と、除雪操作装置や周囲確認などを行う者の計2人が乗車しているという。
しかし高齢化などによる労働人口減少により、除雪車の運転技術者の担い手不足が深刻化しており、除雪車の梯団走行に関する少人化・省力化を目的とした自動運転化に向けた技術開発をするに至ったようだ。
■技術開発のポイントは2つ
今回開発を行う技術は2つある。
1つ目は「各除雪車が異なる走行軌跡を自立走行する(自立走行技術)」だ。隊列走行では、先行車両の後ろを後続車両が同じ走行軌跡を追従する技術が用いられているが、梯団走行は各車両の走行軌跡が異なる。そのため全車両が高精度な衛星測位により自車位置を正確に把握し、道路線形データにより車両ごとに異なる走行軌跡を自立走行することを可能にする技術となる。
2つ目は「後続車両が先行車両と異なる軌跡を適切な車間距離を保ちながら走行する(車間距離の保持技術)」だ。隊列走行では、LiDARで先行車両との車間距離を計測しながら、追従技術との組み合わせで車間距離制御を行っていたという。
【参考】関連記事としては「LiDARとは?(2023年最新版)」も参照。
しかし、除雪時にはLiDARは雪の反射により正確な距離計測が困難になると想定されるため、各車両の位置や速度をV2V(車車間通信)のデータを用いることにより車両相互の位置関係を把握し、適切な車間距離を保ちながら梯団走行を可能にする技術を開発していく。
なおこの2つの技術は特許出願中だという。
■これからの日本に大きな助けに
除雪車は、除雪作業開始前に隊列走行状態から梯団走行状態になり、除雪作業終了後に再び隊列走行状態に戻る。
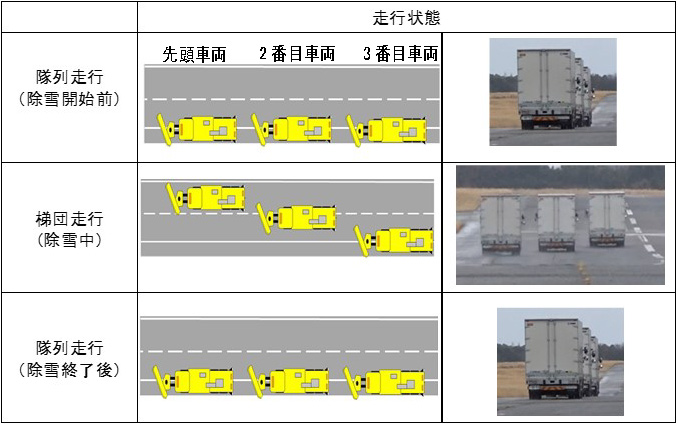
現在は、隊列→梯団→隊列の走行形態における先頭車両のハンドル操舵と2・3番目車両のハンドル操舵・速度制御について、人の手を介さずプログラム制御する試験走行を開始している段階のようだ。将来的には、除雪車の2・3番目車両では除雪装置操作者などを含む運転技術者を、2人から1人に減らした梯団走行の実現を目指す。
豪雪地域は高齢化が進む地域とエリアが重なることも多く、除雪作業の担い手不足が深刻化している。除雪作業の自動化は、これからの日本に大きな助けとなるはずだ。今回のNEXCO中日本とNECにも引き続き注目していきたい。
【参考】関連記事としては「成功!除雪の自動運転に向けた実証事業 福島県昭和村で」も参照。







の意味・定義・読み方は?自動車業界の新潮流を示す")
ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

