

自動運転の実用化で世界の先頭を走る米グーグル系Waymo(ウェイモ)。今日の自動運転開発競争の火付け役として、追随する他社を寄せ付けぬ研究開発力を誇る。
こうした研究開発力を示す1つの指標に、特許技術が挙げられる。この記事では、日本国内で同社が出願した特許技術を紹介していく。
なお、特許情報は独立行政法人工業所有権情報・研修館(INPIT)が運用する「J-PlatPat(特許情報プラットフォーム)」を参照した。カッコ内は出願日・出願番号を表す。
記事の目次
- ■ウェイモ(グーグル)の自動運転関連特許
- 自動運転車向けサーマルイメージング(2020年10月23日/特願2020-177754)
- 自動運転車両カメラのセンサクランプ設計(2019年12月20日/特願2021-532302)
- 遮蔽を伴う道路利用者反応モデリングに従って自律車両を動作させること(2019年12月3日/特願2021-532040)
- 車両の内部状態の判別と応答(2019年2月19日/特願2020-541977)
- 自動運転車両の画像捕捉デバイスが遭遇する光の範囲を制御するための方法およびシステム(2018年12年3日/特願2020-531521)
- 光検出および測距(LiDAR)システムにおける範囲のエイリアシング検出および軽減のための延長された検出期間の使用(2018年6月6日/特願2020-504710)
- 車両の速度を制御するための予測推定(2017年8月8日/特願2017-153343)
- ■【まとめ】自動車メーカーの高い壁、テクノロジー企業が超える日は?
■ウェイモ(グーグル)の自動運転関連特許
自動運転車向けサーマルイメージング(2020年10月23日/特願2020-177754)
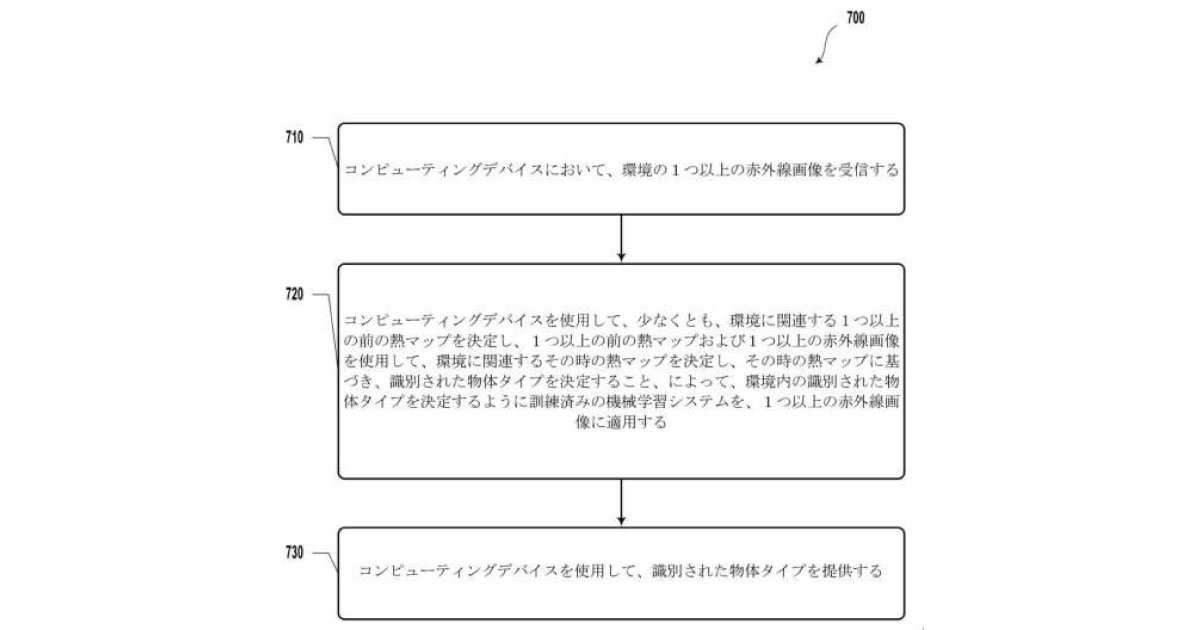
機械学習技法を活用し、サーマルイメージングシステムにおける物体の識別・分類を向上させるためのコンピュータ実装方法などに関するもので、サーマル・赤外線イメージングデバイスを使用して所与の環境内の物体を分類する技術だ。
サーマルイメージングデバイスは、所与の物体に関するラジオメトリック情報をもとに物体の放射率値が推定され得る場合、この情報を利用して物体の温度を知ることができるが、推定放射率値を有する多数の物体が関与している場合、サーマルイメージングデバイスは物体間の温度のバラツキを決定することができ、組成または物体のタイプに関する予測を行うことができるという。
自動運転車両カメラのセンサクランプ設計(2019年12月20日/特願2021-532302)
イメージングシステムは、ビデオカメラやスマートフォン、ウェブカメラ、デジタル一眼レフなどによって電子動画を取得するよう構成可能だが、多くの場合、各デバイスが独自の熱膨張係数(CTE)を有するため、イメージングシステムのコンポーネントの位置がずれたり、互いに不適切な間隔になったりする可能性がある。
イメージングシステムのコンポーネントが最初は望ましい形で配置されていても、その配置はデストレッシングやデボウイング、他の材料緩和挙動を引き起こす場合がある温度サイクルのため、時間の経過とともに変化するケースがあるという。
しかし、一部の用途では温度サイクルの影響に関係なく、配置を固定したままにすることが望ましく、こうした際に有用な設計方法に関する技術のようだ。
遮蔽を伴う道路利用者反応モデリングに従って自律車両を動作させること(2019年12月3日/特願2021-532040)
自動運転車を動作させる手法で、車両の環境内の遮蔽された車線セグメントを使用し、車両の環境内の道路利用者の挙動を予測する技術だ。
交差点における右左折などの際、自動運転車は車両操縦のタイミングを判定するために周囲の物体の挙動を予測することが求められるが、物体が走行するだろう車線セグメントや、物体が通過すると予測される車線セグメントを遮蔽するかどうかを検出することで、複雑なマルチボディ問題を解決する必要がなく経路再計算などのプロセスを簡素化することができ、自動運転システムが予測や反応をより迅速に行うことができるとする技術のようだ。
車両の内部状態の判別と応答(2019年2月19日/特願2020-541977)
自動運転車が移動や輸送サービスを提供する過程で、車内の状態を自動判別する技術だ。
ドライバーレスの自動運転車においては、車内の画像を人間のオペレータに直接送って確認してもよいが遠隔オペレータとのやり取りに待ち時間が発生し、乗員がシートベルトを外して車両周辺を移動する場合など、特定の状況では問題となるケースがあるという。また、車両が通信可能エリアにない場合や車両のコンピューティングデバイスと接続できないエリアにある場合、このプロセスが無効になることもあるという。
こうした課題に対し、車両内の所定の場所で1つ以上の可視マーカを識別するための画像処理や、識別した1つ以上の可視マーカに基づいて車両の内部状態を判別すること、判別した内部状態を使用して応答アクションを特定すること、応答アクションを実行するために車両を制御すること――といった工程を踏むことで効果的に応答することが可能になるとしている。
自動運転車両の画像捕捉デバイスが遭遇する光の範囲を制御するための方法およびシステム(2018年12年3日/特願2020-531521)
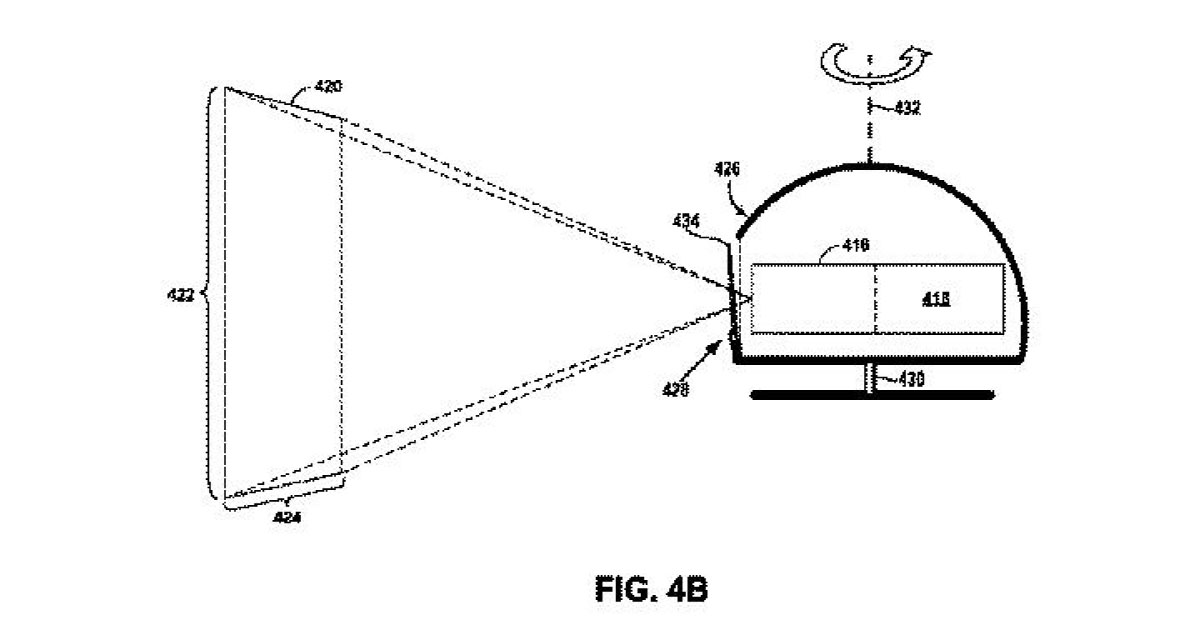
画像データを生成するように構成された画像捕捉デバイスが生成する画像データの品質は、外部光の影響で低下し得るが、この外部光の影響を制御するための方法・システムに関する技術だ。
コンピューティングシステムが、画像捕捉デバイスによって生成される画像データの品質が閾値未満と判定した際、外部光の範囲を制御するために光制御を行い、閾値よりも高い状態に画像データの品質を効果的に増加させることができるといった内容の特許となっている。
光検出および測距(LiDAR)システムにおける範囲のエイリアシング検出および軽減のための延長された検出期間の使用(2018年6月6日/特願2020-504710)
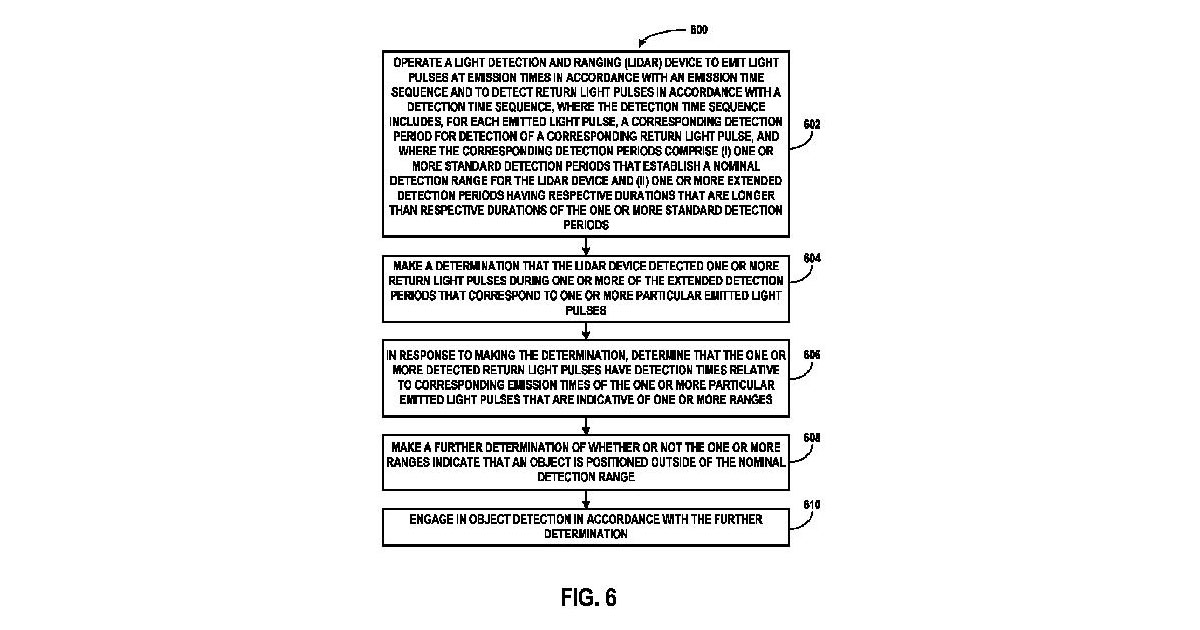
自動運転で活用されるLiDARが、公称検出範囲外に位置するオブジェクトから反射した戻り光パルスを検出したかどうかをコンピューティングシステムが判定するのに役立ち得る手法が開示されている。
LiDARは、デバイスごとに定められた公称検出範囲内において全体をスキャンし、範囲内における反射面を示す「ポイントクラウド」を組み立てながら各オブジェクトまでの距離を算出する。
公称検出範囲外に位置するオブジェクトから反射される光パルスは、LiDARに到達する前に光パルスの強度が大幅に減衰するため、検出されないが、状況によって検出されることもあり、範囲にあいまいさが生じる。
そこで、コンピューティングシステムが1つ以上の標準検出期間および1つ以上の延長された検出期間を有するようにLiDARを動作させ、LiDARの検出範囲を延長することで、延長検出期間中の光パルス(複数可)の検出に基づいて公称検出範囲外から戻り光パルスを検出したかどうかを判定できるようだ。
車両の速度を制御するための予測推定(2017年8月8日/特願2017-153343)
車両の速度を制御するための予測推論に関する実施形態を開示したもので、出願人はウェイモではなくグーグルとなっている。
コンピューティングデバイスが、自動運転車両と同一車線内の前方を走行する第1、第2車両を特定する構成や、第1車両と同等の速度に達する余裕距離を決定する構成、第1・第2車両の余裕距離と自動運転車両の速度に基づいて自動運転車両の速度を調節する距離を決定し、その距離に基づいて速度を調節する構成など、さまざまな形態が示されている。
■【まとめ】自動車メーカーの高い壁、テクノロジー企業が超える日は?
やや漠然とした内容となっているが、Waymoは海外において、乗客をピックアップする場所を正確に特定する技術や、衝突した際に車両の部材を軟化させ衝撃を和らげる技術など、さまざまな特許を取得しているようだ。
なお、特許庁が2021年2月に発表した特許出願技術動向調査によると、2014~2018 年の間に日米欧独中韓で出願された自動運転関連技術は計5万3,394件で、1位トヨタ、2位フォード、3位デンソー――とトップ10は大手自動車メーカーやサプライヤーが占めている。グーグル・ウェイモは10位圏外だ。
自動運転における車両制御関連技術などはまだまだ既存メーカーが強さを発揮しているようだが、将来新参のテクノロジー企業がランクインを果たす可能性も十分考えられる。業界のイノベーションに期待したい。
▼Waymo公式サイト
https://waymo.com/
【参考】関連記事としては「Waymoの自動運転戦略(2022年最新版) 無人タクシーを世界初展開」も参照。

とは?日本やアメリカ・中国の状況は?")




の意味・読み方は?自動車業界の新潮流を示す")
・自動運転ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル・スズキ】欧米車種も")

