


トヨタの宇宙事業が着実に進展しているようだ。トヨタと三菱重工業、宇宙航空研究開発機構(JAXA)は2023年7月、共同開発を進めている月面有人探査モビリティ「ルナ・クルーザー」などの進捗状況について発表した。
目標に据える2029年の打ち上げまで残すところ6年。開発はどこまで進んでいるのだろうか。プロジェクト概要とともに現在の開発状況に迫る。
▼「有人与圧ローバ」および「LUPEXローバ」の開発状況に係る概要資料について
https://global.toyota/jp/newsroom/corporate/39537608.html
記事の目次
■宇宙探査に向けた取り組み
過酷な月面環境に耐える有人与圧ローバの開発に着手
トヨタは2019年、JAXAと国際宇宙探査ミッションにおける協業に向けた検討を進めていくことに合意したと発表した。
両者がこれまで共同検討を進めてきた、燃料電池車の技術を用いた月面有人探査活動に必要なモビリティ「有人与圧ローバ」の開発を加速させ、2029年の打ち上げを目指す方針だ。
地球比6分の1の重力下で多数のクレーターや崖が点在し、過酷な放射線環境や温度環境、極高真空環境の中で、実際に人を乗せて1万キロ以上を走破可能な有人与圧ローバを開発し、2030年代の有人月面探査を支えていく計画だ。
ローバは月面を6週間にわたって走行することが求められるため、マイクロバス2台分に相当する6.0×5.2×3.8メートルのボディに4畳半ほどの空間を設け、2人が滞在できる居住能力も持たせる。
水素と太陽光発電をエネルギー源とするほか、クルーが安全かつ確実に移動可能な自動運転機能を搭載する。
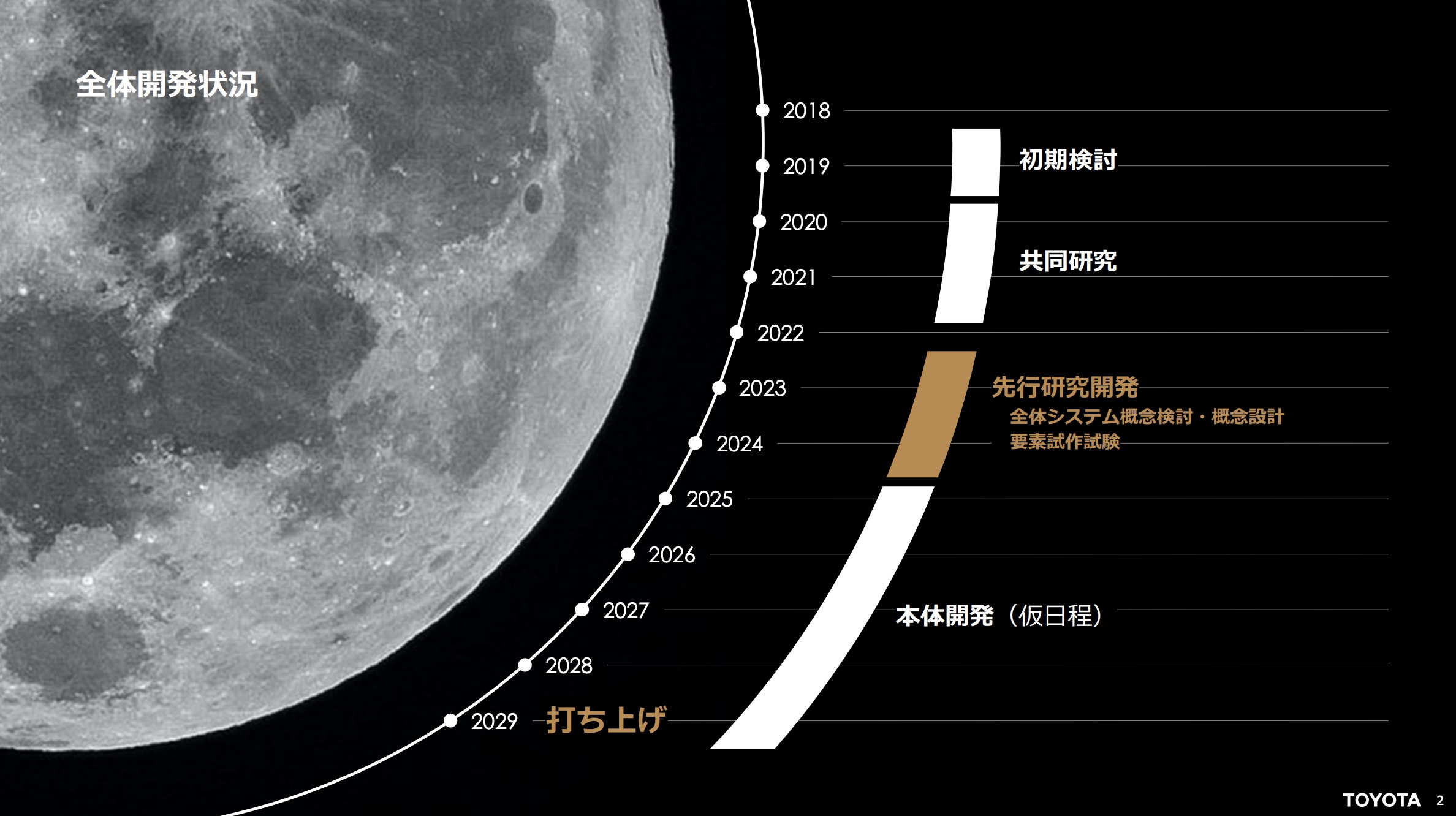
当初計画では、最初の3カ年でローバに必要とされる技術要素の識別や試作車の仕様定義、各技術要素の部品の試作や試作車の製作、これらを用いた実験・評価を行う。
また、2029年の打ち上げ実現に向け、2022年以後に1/1スケールの試作車を製作・評価し、月極域での走行系に関するデータ取得や実証を行う。2024年以後にエンジニアリングモデルの設計・製作・評価を行い、フライトモデル(実機)の設計を進める。そして2027年以後にフライトモデルの製作・性能品質の検証を行うとしている。
愛称は「ルナ・クルーザー」
2020年には、有人与圧ローバの愛称を「LUNAR CRUISER(ルナ・クルーザー)」と命名した。トヨタのSUV「ランドクルーザー」に込められた「必ず生きて帰ってくる」という精神を月面でも引き継ぐ想いが込められている。
オールジャパン体制で開発
開発はトヨタとJAXAだけでなく、オールジャパン体制が敷かれているようだ。2020年時点で開発チームには約100社が集まり、さまざまな角度から技術を学んでいるという。
タイヤを例にすると、ブリヂストンが月面用タイヤの試作を進めている。放射線が降り注ぎ、マイナス170度に達する月面ではゴムは使いものにならないため、オール金属製のタイヤを使用するという。
■最新の開発状況
半世紀ぶりの月有人探査プロジェクトが進行
最新の発表では、月探査をめぐる国際動向やトヨタと三菱重工の連携をはじめとした日本における国際宇宙探査への取り組みなどが紹介されている。
月探査は米国や中国、ロシア、欧州、インド、UAE、韓国などが調査を進めており、米国では月面有人探査をはじめとするアルテミス計画が進行中だ。
月面有人探査は、初めて有人月面着陸を果たしたアポロ11号(1969年)からアポロ17号(1972年)まで行われてきたが、それ以後50年余りにわたり行われていない。政治面や予算面が主な要因となっているようだ。
ゴールは火星有人着陸
NASAはアルテミス計画で2030年代の火星有人着陸を目標に掲げており、月面における持続的な活動を通じて火星探査に必要な技術の獲得を狙っているようだ。日本や欧州、カナダなどの関係国が参加を予定しており、2025年以降に有人月面着陸を再開させる計画としている。
JAXAも有人火星探査を最終ゴールに据え、月軌道や月面で事前実証を行うとともに持続的な月面での経済活動に向けた準備を進めている。国際協力の枠組みでキー技術を有効活用し、2030年ごろの日本人月面到達を目指す構えだ。
着陸技術については、無人月面探査機「SLIM」でのピンポイント着陸技術を発展させ、着陸能力を段階的に拡大する。表面探査技術については、月極域探査などで走行技術や電力発生技術、越夜技術などの基本技術を実証した上で与圧ローバに発展させる。
月探査における通信・測位に関しても優位性のある技術を生かしつつ、国際協力によってアーキテクチャ構築を目指すという。
トヨタと三菱重工が連携
こうした枠組みのもと、有人与圧ローバの開発を進めているのがトヨタや三菱重工だ。トヨタは再生型燃料電池(RFC)やオフロード走行性能、オフロードにおける自動運転、居住性や視認性、操作性といったUXをコア技術に先行研究開発を進めている。
再生型燃料電池は、14日間に及ぶ太陽光のない月の夜を無事に過ごせるよう、昼間に大容量のエネルギーを繰り返し再生する持続可能な小型軽量エネルギーシステムを構築する。
三菱重工と連携した海洋技術の知見や、地上で鍛えた燃料電池の技術・信頼性を生かし、燃料電池技術と水電解技術、太陽電池を統合したシステムを開発する。
オフロード走行性能面では、レゴリス(堆積層)、クレーター、岩石、傾斜といった複合環境を安全に走破できるタイヤ開発と駆動力制御、走破性能と電力消費の両立を図っていく。 具体的には、4輪独立インホイールモーターや転舵機構を採用し、最適な運動制御を開発するとともに、ブリヂストンの金属タイヤやランドクルーザーで培った堅牢な構造などの要素技術の開発を進めていく。

電波航法やスタートラッカー、慣性航法技術などを活用 ガーディアン技術も搭載
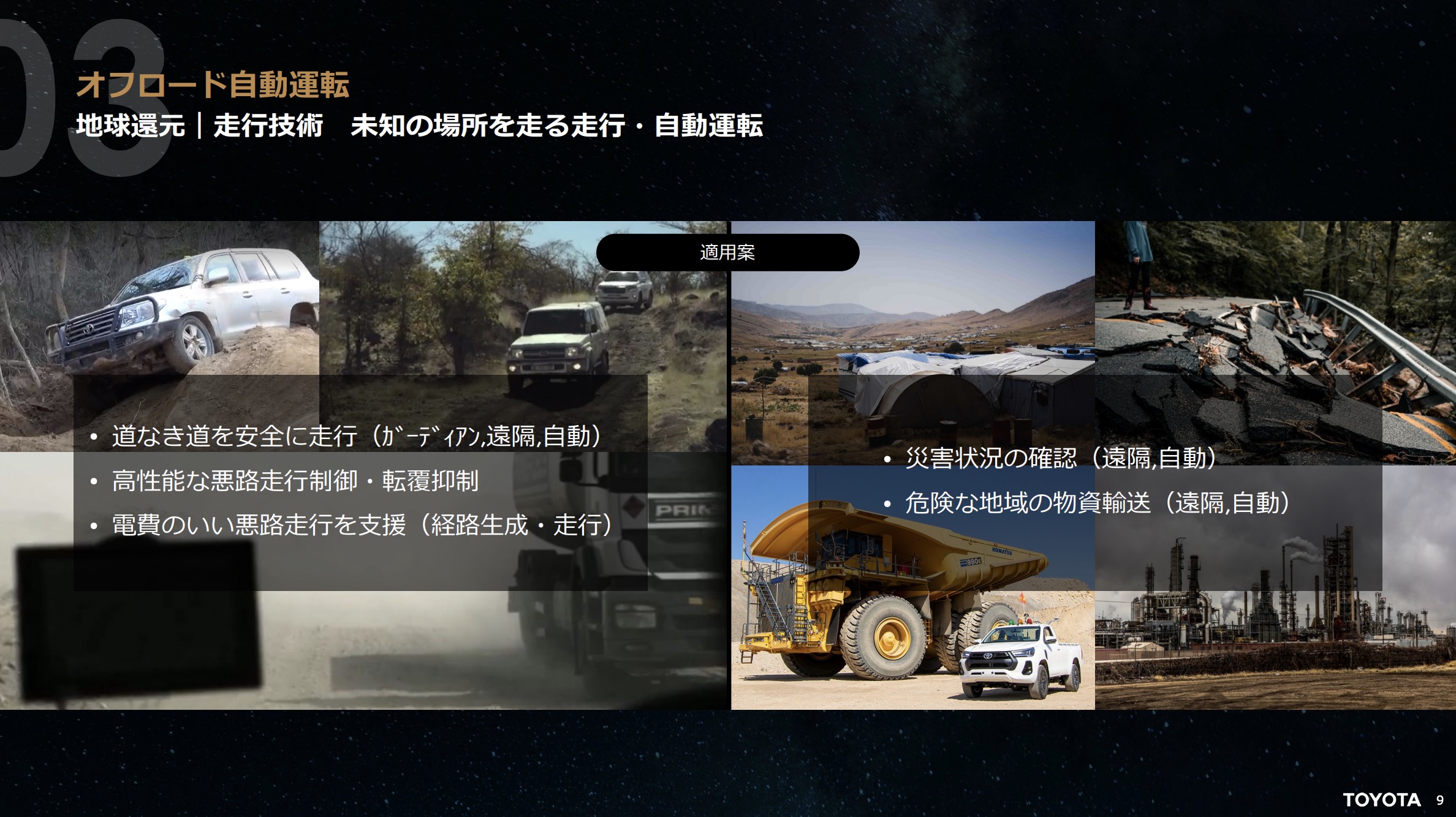
自動運転関連では、初見のオフロード路を自律走行することが求められ、月面における自己位置推定や障害物検知、回避経路の策定などが課題に挙げられている。
道なき道を安全に走行する技術には、トヨタが開発を進めているガーディアン技術が応用されるようだ。
自己位置推定には、電波を用いて自己位置を推定する電波航法や、恒星の位置から姿勢角を推定するスタートラッカー、三次元加速度から速度や移動量を推定する慣性航法などによる航法技術が用いられる。
周辺環境の把握には、自動運転車同様LiDAR点群による障害物検知技術を活用し、障害物や路面勾配を把握する。経路生成においては、安全に走行できる経路を生成し、経路に沿って自動運転する技術やマニュアル操作時におけるガイド機能などを搭載するようだ。
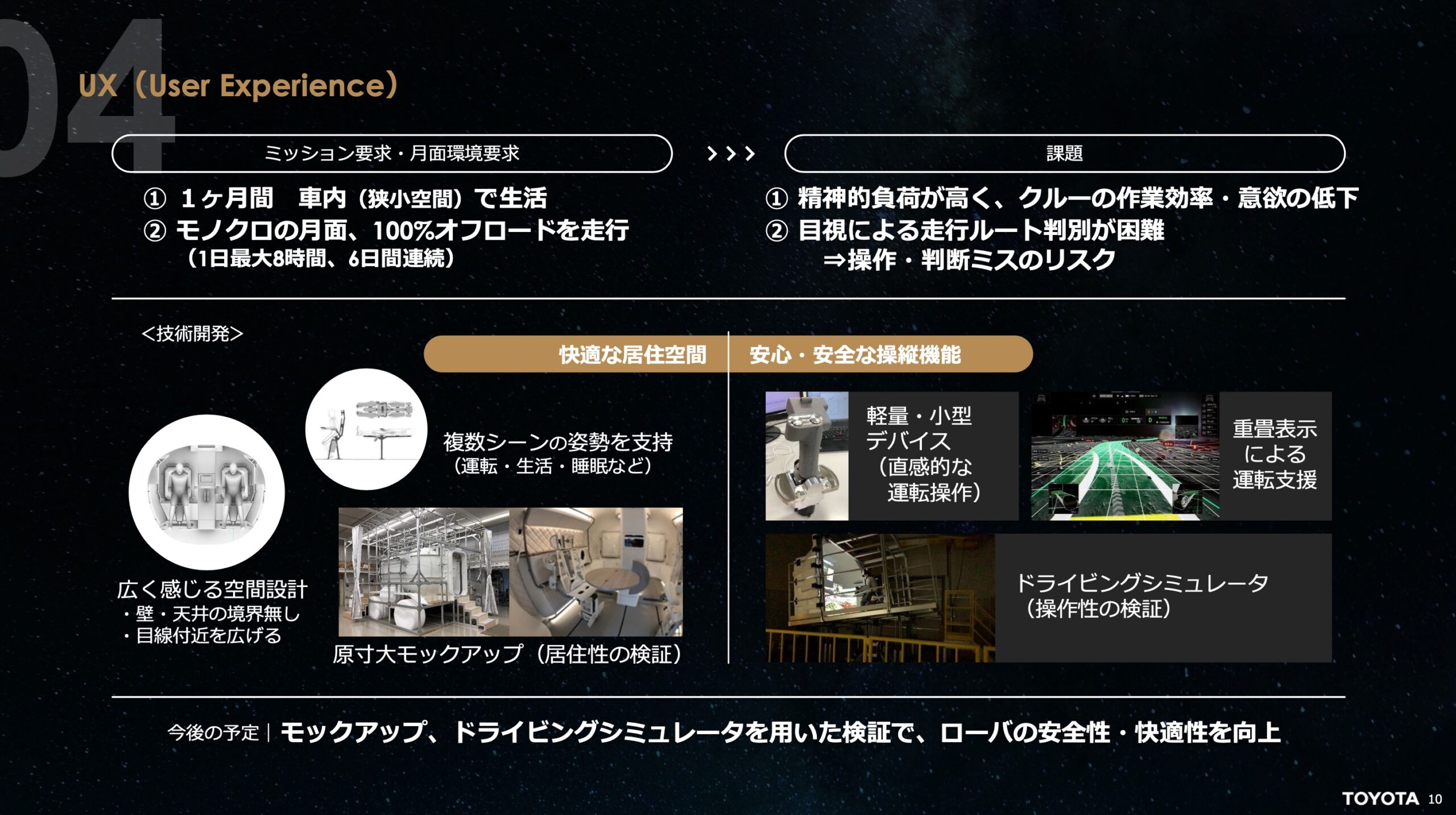
UX関連では、1カ月以上にわたり車内で生活するためクルーの精神的負荷が高く、作業効率や意欲の低下が懸念される。また、目視による走行ルートの判別も困難となることが想定されている。このため、広く感じる空間設計や複数シーンを想定した姿勢の支持、直感的に運転操作可能な軽量・小型デバイス、重畳表示による運転支援などを検討している。
無人探査機で有人与圧ローバ向けデータを取得
一方、三菱重工は月極域探査機(LUPEX)ローバの開発を進めている。太陽光発電パネルや航法向けのカメラ、掘削・採取機構、走行クローラを搭載した無人探査機だ。
早ければ2025年にも打ち上げる計画で、月南極域における水の存在量や資源としての利用可能性の確認、重力天体の表面探査技術の確立、有人与圧ローバ開発に向けた走行技術に関するデータ取得や実証などを行う。
トヨタが地球上で培った自動運転技術を活用し、月面環境においても安全・正確に目的地までローバを移動させる航法誘導制御技術を確立し、月面環境における走行実証とデータを生かして有人与圧ローバの開発につなげていく構えだ。
■【まとめ】月面で培った技術を地球上にフィードバック?
トヨタらは、月面を数時間ではなく、1カ月以上走行かつ生活可能な有人モビリティを開発していることがわかった。長期間走行・生活を可能にするモビリティ開発からは、本格的な月滞在に向けた知見も得られそうだ。
また、道や地図が存在しない月面走行技術は、地球上のあらゆる場所でモビリティを安全に走行させる技術としてフィードバックすることができる。地球上におけるモビリティ技術向上への寄与にも期待したい。
【参考】関連記事としては「建機の「自動運転」、月面で挑戦!その特殊な方法とは?」も参照。

とは?搭載する自動車の車種は?自動運転ではない?")




の自動車保険を比較!")
の意味・定義・読み方は?自動車業界の新潮流を示す")
ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

