

米ライドシェア最大手のウーバーテクノロジーズの自動運転車が2018年3月に歩行者をはねて死亡させた米アリゾナ州での事故で、米運輸安全委員会(NTSB)は5月24日、事故調査の中間報告書を公表し、事故時に緊急ブレーキが作動する設定になっていなかったことが明らかになった。
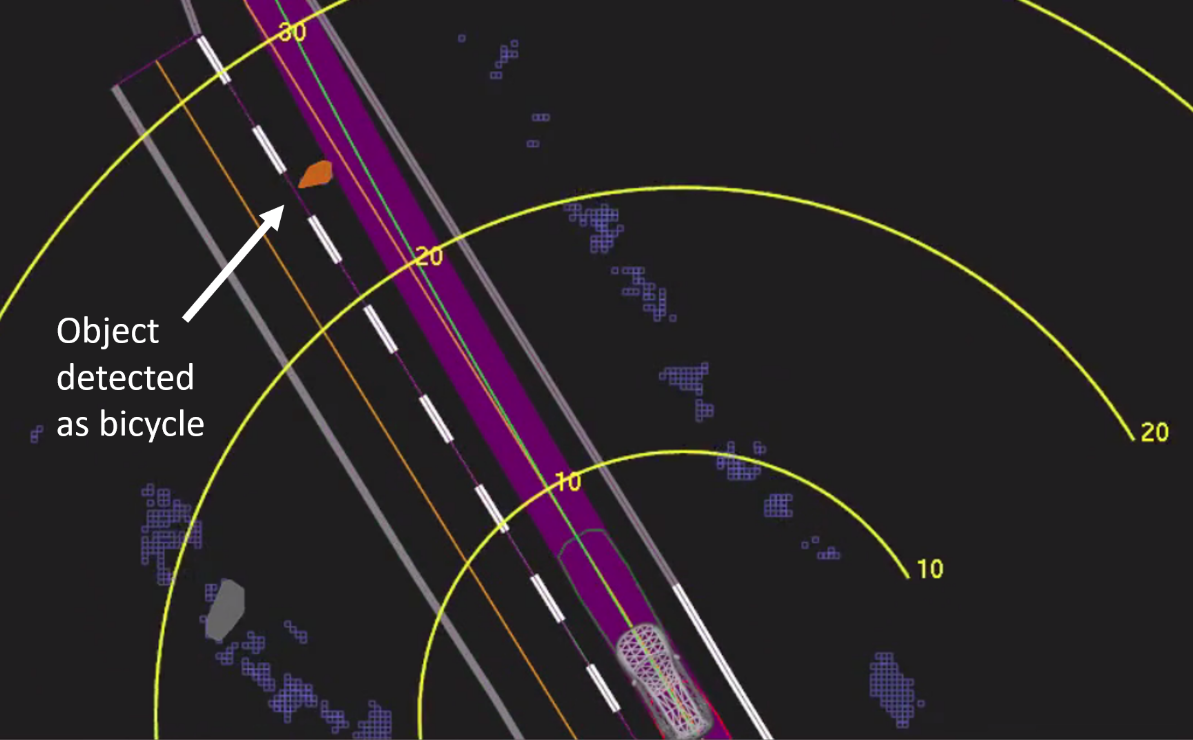
報告書によると、ウーバーの自動運転車に搭載されたレーザーレーダー「LiDAR」は衝突の6秒前に歩行者を認知していた。さらに衝突の1.3秒前(約25メートル前)に自動運転システム側は緊急ブレーキが必要だと判断していたが、ウーバー側は車両の不規則な動きをする可能性を減らすため、自動運転中の自動緊急ブレーキが作動しないように設定していた。
【参考】LiDARは光を使ったセンシング技術で自動運転車の周辺情報を検知・認知するレーザーレーダーのこと。自動運転の「目」と言われており、自動運転車の実用化に必須のコア技術の一つとされている。
報告書によると、ウーバーの自動運転車には衝突の危険がある場合に同乗している係員に警告を発する仕組みも備えていなかった。そのため、今回の事故でも警報を発されることはなく、係員も事故発生時は前方道路を見ていなかったという。
報告書によると、事故は2018年3月18日の午後9時58分(現地時間)に発生した。ボルボの多目的スポーツ車(SUV)「XC90」をベースにしたウーバーの自動運転車が試験走行をしているときに事故が起き、44歳の女性が係員として車両に同乗していた。
事故が起きた現場はアリゾナ州マリコパ郡東部テンペの幹線道路で、車線数は左折用2車線、直進用2車線、バイク用1車線を含む計5車線だった。ちょうど左折専用路線が分岐し始める地点で事故が発生した。

はねられて死亡した49歳の女性は道路の左側から道路に進入し、ウーバーの自動運転車は最大時速43マイル時(時速約70キロ)で女性に衝突した。道路の制限速度は39マイル時(時速約62キロ)だった。ウーバーの試験走行車は進行方向に向かって右から2車線目(直進用車線)を走行していた。
事故を起こしたウーバーの自動運転車はこの日、午後9時14分にウーバーの車庫を出発して、予め指定された試験走行コースを走行していた。事故が起きたのは試験走行コースの2回目の周回中で、事故発生の19分前の午後9時39分からコンピューター制御が稼働していた。
【参考】米運輸安全委員会が公表した中間報告書の詳しい内容は「Preliminary Report Highway: HWY18MH010」(英語)を参照。
ウーバーはこの死亡事故を受け、2018年5月23日に事故を起こしたアリゾナ州での公道試験を再開させないことを発表している。現在アメリカ国内での試験走行は全エリアで中止しているが、今後はペンシルベニア州ピッツバーグやカリフォルニア州サンフランシスコを中心に公道試験を進める見込み。
【参考】ウーバーのアリゾナ州での公道試験再開断念に関しては「ウーバーの自動運転試験、米アリゾナ州で再開断念 300人レイオフへ|自動運転ラボ ![]() 」を参照。ウーバーの死亡事故を含む過去の自動運転車の事故については「自動運転の事故まとめ ウーバーやテスラが起こした死亡事故の事例を解説|自動運転ラボ
」を参照。ウーバーの死亡事故を含む過去の自動運転車の事故については「自動運転の事故まとめ ウーバーやテスラが起こした死亡事故の事例を解説|自動運転ラボ ![]() 」を参照。
」を参照。


の意味・読み方は?自動車業界の新潮流を示す")


の意味・読み方は?自動車業界の新潮流を示す")

ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

