

半導体大手の米NVIDIAが、自動運転向けのマッピング技術でも台頭してきた。マッピング技術開発を手掛ける米スタートアップDeepMapを2021年夏に買収し、自社ソリューションと融合させることでグローバルな地図作製や更新を可能にした。
この記事では、同社の高精度3次元地図(以下HDマップ)関連の取り組みについて解説していく。
記事の目次
■NVIDIAのマッピング領域における取り組み
2021年6月にDeepMap買収を発表
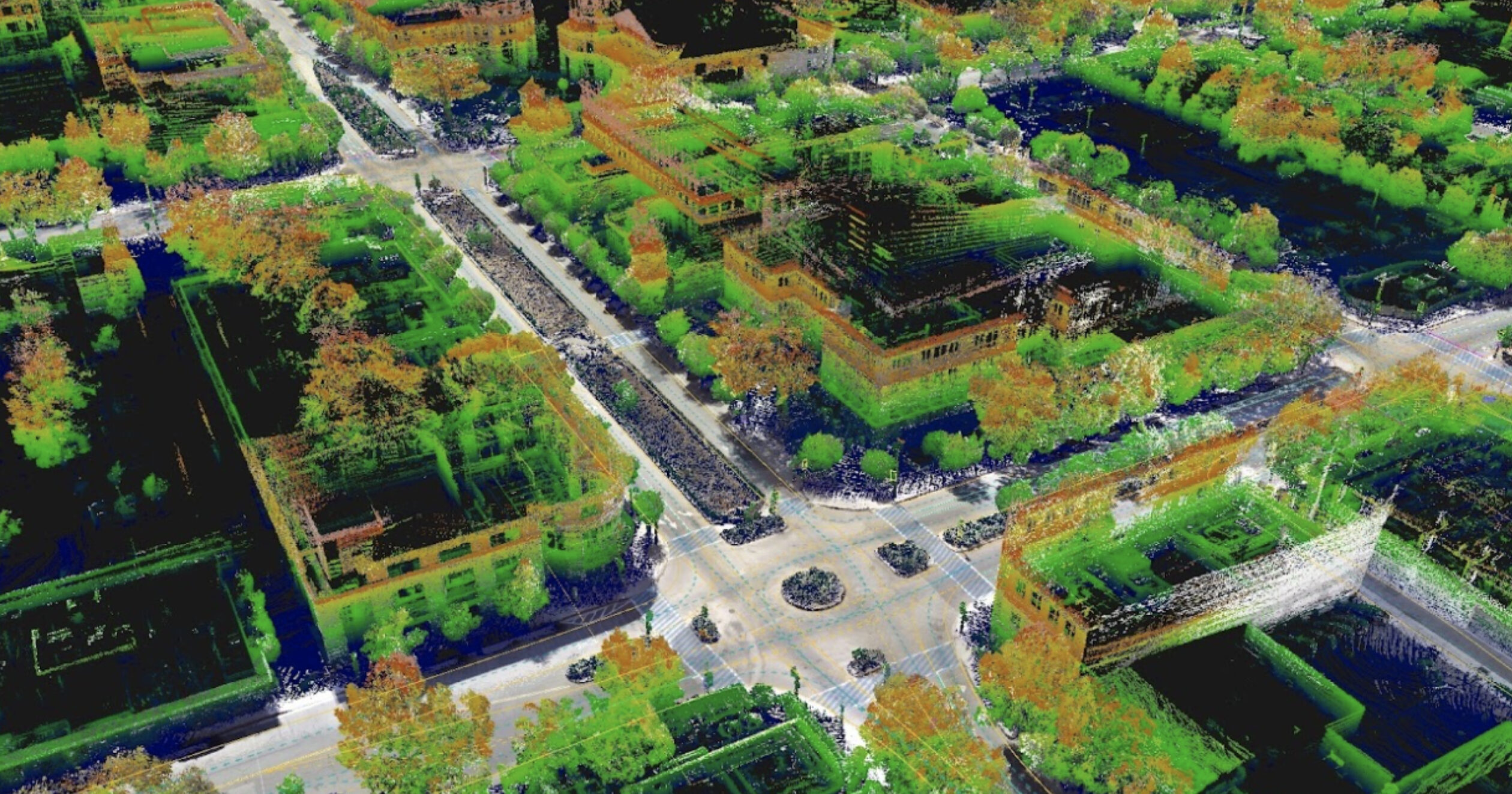
NVIDIAは2021年6月、DeepMapの買収を発表した。DeepMapはグーグルやアップルなどで開発経験を持つエンジニアが2016年に立ち上げたスタートアップで、フルスタックのHDマッピングサービスを手掛ける。
「自動運転車はマップの消費者であり作製者」という考えのもと、車両センサーとクラウドソーシングされたデータを使用し、運転中に継続的に更新できる高解像度マップを作製する技術を有する。GPSなどによる絶対精度ではなく相対精度に着目し、誤差数センチレベルの測位精度を実現するという。
これまでにフォードや上海汽車などがパートナーシップを結んでいる。自動運転トラック開発を手掛けるスウェーデンのEinrideは、すでに自社システムにDeepMapの技術を統合しているようだ。出資関連では、NVIDIAのGPU VenturesやRobert Bosch Venture Capitalなどが同社に出資していた。
DeepMapの技術とNVIDIAのソリューションを融合
NVIDIAはDeepMap買収にあたり、同社のテクノロジーはマッピングソリューションや世界中の地図を拡張し、自動運転の高度化・拡大に貢献するとしている。
また、自社ソリューションと融合を図ることで、NVIDIA DRIVEで利用可能なマッピングやローカリゼーション機能を強化し、自動運転車の現在位置や進行方向などをより正確に認識できるようになるという。
NVIDIA DRIVE Mappingでマッピング技術を世界展開
NVIDIAは、2021年の年次カンファレンスで「NVIDIA DRIVE Mapping」に関する基調講演を行った。
同社は、マッピングは集合的な記憶として機能する自動運転の柱となる技術で、現在NVIDIAとDeepMapのチームが協働して高性能なマッピングソリューションの世界展開を加速しているとした。DeepMapが蓄積してきた専門知識を活用することで、NVIDIA DRIVE Mapping は世界中に拡張でき、より安全で効率的な自動運転モビリティがさらに多くの道路で実現可能になるという。
HDマップは誤差数センチレベルの正確性を保ち、また道路工事や車線規制といった最新の道路状況を随時反映しなければならず、高速処理と最小限のデータストレージでさまざまな自動運転車両に導入可能な効率的かつ拡張性を持ったシステムが求められる。
NVIDIA DRIVE Mappingを活用することで、専用の自動運転車であることを問わず、リアルタイムにマップ作製や更新を行うことができるようになり、世界中の自動運転に適用可能なスケーラブルなソリューションが構築されるという。
また、NVIDIA DRIVE Mappingにはカメラとレーダーを活用した自己位置推定レイヤーが搭載されており、カメラでは認識できない可能性がある悪天候や日照条件下などで自己位置推定と自動運転を可能にするレーダーによる冗長レイヤーが提供されている。マッピング用のニューラルネットワークは、信頼性と精度向上に向けグラウンドトゥルースマップを使用してトレーニングされている。
車内のNVIDIA DRIVE AGX AI コンピューティングプラットフォームには、DRIVE Hyperion のセンサーデータが供給される。マッピングネットワークはこのデータを使用して認識を行い、交差点や信号機、駐車場、車線の境界などを特定し、運転可能な安全なルートを決定する。このネットワークは、さまざまな環境や日照条件、天候、地域で利用できるという。
クラウドソーシングプラットフォームであるNVIDIA DRIVE Mappingがカバーする範囲は、NVIDIA DRIVE Hyperionを利用する自動車メーカーなどの数とともに拡大している。
NVIDIA DRIVE MappingはNVIDIA DGX SuperPODインフラストラクチャを活用し、マップの更新をグローバル規模で行う。ここで使用されるAIシステムは、DRIVE Hyperion搭載の車両からテラバイト級の認識データを取り込み、マップの作製や更新を行う。
道路上を走行するDRIVE Hyperion搭載車両の幅広い基盤に堅牢な認識技術が加わることで、車両は道路上の変化を適時検出し、マップを最新の状態に維持することができる。
■NVIDIAの「DRIVE Localization」とは?
NVIDIAが提供するソリューションの中に、自車位置を推定する「DRIVE Localization」がある。車両に搭載されたカメラやIMUなどの低コストセンサーからデータを収集し、NVIDIAの専用ディープニューラルネットワークがデータを瞬時に分析し、車線の境界や標識、道路端などを検出する。
その上で、DRIVEローカリゼーションモジュールがサードパーティ製のHDマップにセンサーデータをオーバーレイし、何千もの視点を並行して評価することで正確な位置や方向を特定するのだ。
このローカリゼーション機能の拡張に向け、NVIDIAはこれまでに中国のBaidu やNavInfo、オランダのHERE Technologies、TomTom、日本のゼンリンなどHDマップを作製するパートナー網を築いてきた。
各社のマップをDRIVEソフトウェアと互換性のあるものにすることでグローバルローカリゼーションを可能にし、NVIDIAのローカリゼーション技術が世界中のどこでも有効になるよう取り組みを進めてきたのだ。
■DeepMap買収はグローバルローカリゼーションの布石
今回のDeepMap買収は、このグローバルローカリゼーションの確立に向けた布石と言える。DeepMapの技術をNVIDIAのソリューションにすることで、HDマップを作製するパートナー企業が存在しないエリアにおいても、開発各社がマップの作製や更新を行うことができるようになる。
また、NVIDIAのパートナー企業が世界各地でマッピングを進め、そのデータを共有することで、自動運転において重要な情報インフラとなるHDマップの世界展開・網羅も可能になるのだ。
■自動運転用HDマップ市場、2027年に75億ドル規模に
Report Oceanが2021年10月に発表した調査結果によると、HDマップの世界市場規模は2027年までに75億6,000万ドル(約8,600億円)になるという。2021年からの年平均成長率は31.7%に達する。
一方、H&Iグローバルリサーチが2019年11月に発表した調査結果によると、世界市場規模は2020年の13億ドル(約1,500億円)から2030年には204億ドル(約2兆3,300億円)まで年平均36.2%で成長すると予測している。
自動運転技術の普及拡大とともにHDマップ市場も大きな伸びを見せるようだ。
【参考】HDマップの世界市場規模については「2027年には7倍に!自動運転向け地図市場、8,600億円規模へ」も参照。
2027年には7倍に!自動運転向け地図市場、8,600億円規模へ https://t.co/mFaF9B9hRl @jidountenlab #自動運転 #地図 #市場
— 自動運転ラボ (@jidountenlab) October 26, 2021
■【まとめ】HDマップ世界展開をめぐる動きが過熱
高性能プロセッサの開発にとどまらず、AI技術を駆使した自動運転関連のさまざまなソリューションを展開するNVIDIAだが、ついにマッピング技術にも手を広げた格好だ。
NVIDIAのプラットフォームは自動運転開発の全てを網羅しようとしているのだろうか。いずれにしろ自動運転分野における同社の存在感はいっそう高まりそうだ。
SoC開発を手掛けるライバルのインテル系Mobileyeも、地図をクラウドソース化する技術「REM」により、自社ソリューションを搭載した世界中の車両からデータを収集し、自動運転用のマップ「Mobileye Roadbook」を作製する取り組みを進めている。
自動運転社会の本格到来より一足早く、HDマップの世界展開をめぐる動きが一気に過熱し始めた印象だ。
▼NVIDIA公式サイト(英語)
https://www.nvidia.com/en-us/
▼DeepMap公式サイト
https://www.deepmap.ai/
【参考】関連記事としては「ダイナミックマップとは?自動運転で活躍する3次元地図、意味や役割は?」も参照。

とは?搭載する自動車の車種は?自動運転ではない?")





の意味・読み方は?自動車業界の新潮流を示す")
ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

