

トヨタ自動車の研究組織「未来創生センター」が、自動運転時代の到来を想定し、路上センシングについての開発を行っていることが明らかになった。
同社の公式サイトで紹介されているもので、「道路上にいるすべての人とモノの居場所がわかる魔法の地図を作りたい」として、歩道や脇道も含めた道路上の物体の居場所が分かるような道路を作ることを研究テーマとしている。
この研究をするにあたり、鹿島建設なども協力している。
■監視カメラでは難しい検知を実現する
これまで車両本体を製品として販売してきたトヨタであったが、これからのクルマは情報やエネルギーなど社会インフラと一体化したものに変わり始めており、特に自動運転車や高度運転支援技術はインフラとセットで考えていく必要があると考えているという。
そこで未来創生センターは、クルマが社会インフラの一部となることによって生み出される可能性に着目し、クルマが自動運転に変わったとき、道路はどうあって欲しいのかについて考えるプロジェクトを立ち上げた。
同社によると、路上センシングについては、当初は監視カメラを用いて飛び出してくる歩行者などの把握を行っていたという。しかし、クルマが停車している場所や街路樹の形状は変化するため、カメラでは隠れている歩行者を追い切れないため、道路にセンサーを入れて直接検知するという方法を開発するに至ったという。
■光ファイバーを道路に埋め込む
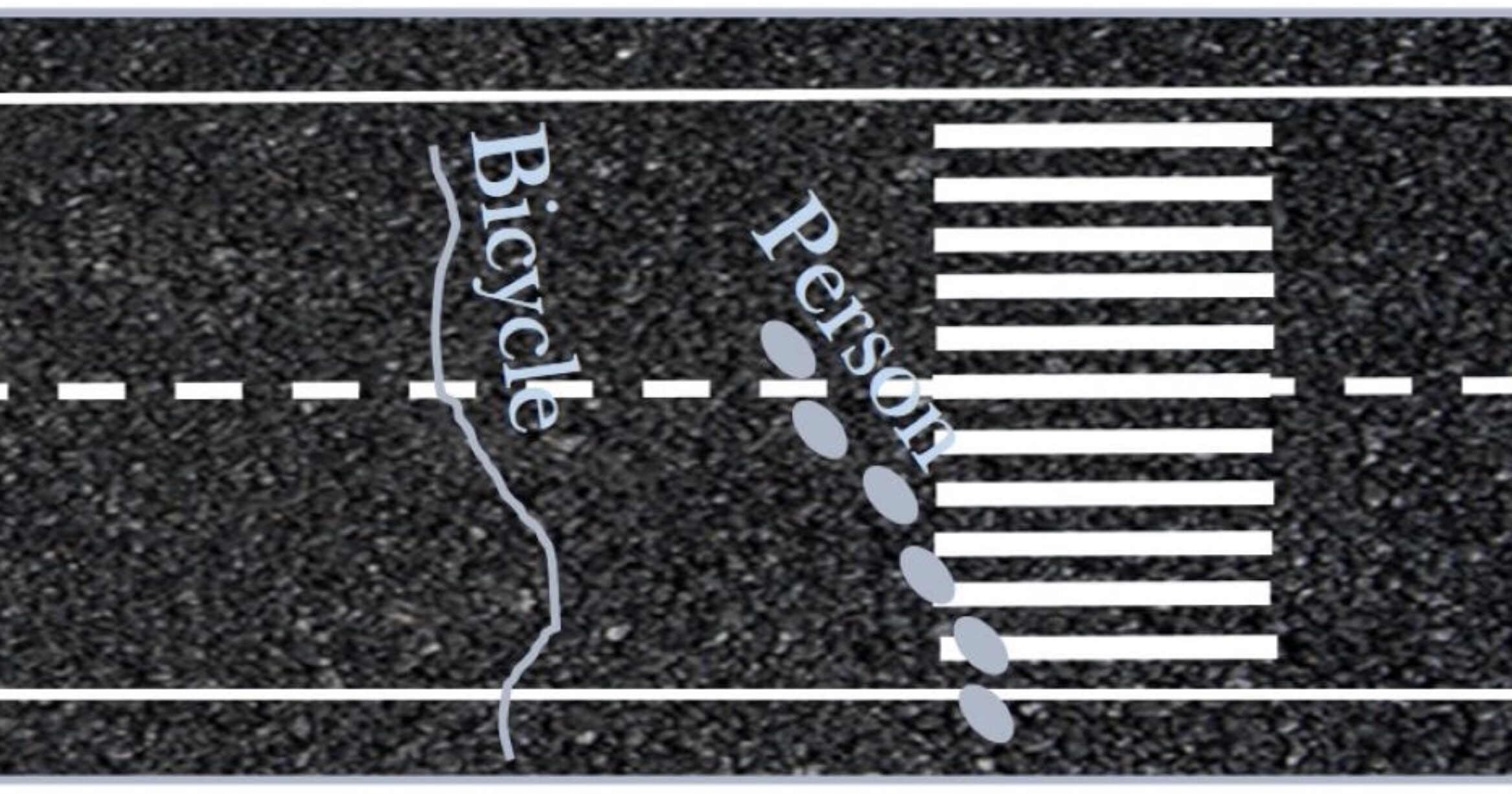
研究では、まずは光ファイバーを道路に埋め込むという実験を行った。道路上に物体が通ることで道路がたわみ、それが光ファイバーのひずみとして計測できるという仕組みになっている。光ファイバーを用いると、道路のような長い距離を1つの計測器で測定できるため、カメラより大幅にコストを削減できるという。
実験の結果、光ファイバーは人の足跡が移動していく様子をしっかりと捕えており、道路から人をセンシングできる可能性があることが分かったという。ただし、実際の道路状況は材料や季節などによって大きなバラつきが生じるため、インフラ設計を全てリアルで検討することは難しい。そこで舗装をモデル化してアスファルト舗装のひずみシミュレーションを行った。
舗装モデルでの実験については、大手道路舗装会社であるNIPPOの技術研究所が支援した。舗装のモデル化では、東京都市大学やカリフォルニア大学バークレー校の指導を受け実現したという。
モデルによるシミュレーションでは、舗装の表面よりも少し深い位置で、より大きなひずみが生じるという特徴的な結果が出た。実際の実験でもシミュレーション通りの結果を得られ、モデルが実用精度を持つことを確認した。

■鹿島の合流で研究がさらに進化
その後、鹿島建設が研究に参加することになり、計測データを使って路上にいるモノの居場所を可視化することが可能になった。さらに新しい技術領域として、計測されたデータとAI(人工知能)機械学習を組み合わせ、路上に人がいるかを判別することなども開発した。
鹿島の技術研究所敷地内に光ファイバーセンサーを埋め込んだ試験舗装フィールドを構築し、道路上の歩行者や自転車などの移動体の位置を、このセンサーで検知したデータにより自動追跡できることを確認したことを、2023年10月10日に発表した。
トヨタはこの新技術「光ファイバーを使った路上センシング」について、AI機械学習を活用し、複数の人やクルマがいる場合でも路上にいるものが何なのかを判定、それらの数秒後の行動を予測することで、潜んでいる危険を早期発見することを目指す。さらに、この技術を実際の道路に設置して長期間データを取得し、実用化に向けた機器仕様や施工技術などについて検討していくという。
■走行中ワイヤレス充電システムなども開発
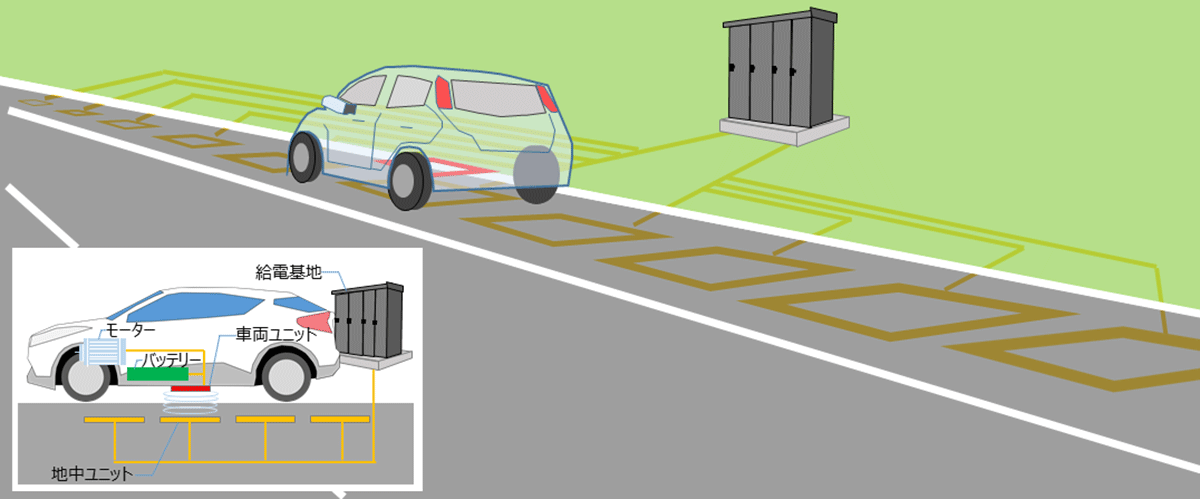
トヨタでは、走っているクルマに電力を供給する「走行中ワイヤレス充電システム」の研究も行っている。これは、高速道路や街中の交差点などの道路下に機器を埋め込み、その道路上を走行・停車するクルマへ向けて充電するという仕組みになっている。
さらに、将来の電動化社会を見据えた「無電柱化縁石」の開発も行っている。無電柱化には、非常に長い工期と多額のコストがかかる。同社は歩道と車道の間にある縁石に電力や通信線などを収納することで、無電柱化を実現したという。
政府がEVシフトを推し進めている現在、路上センシングの開発や充電システムの高度化などの必要性がより高まってきている。「モビリティカンパニー」としての変革を加速しているトヨタの生み出す技術が、EVや自動運転、コネクテッドカーを支えていくことになりそうだ。
【参考】関連記事としては「トヨタ、「未来投資」強調!研究開発費&設備投資は3兆円超に」も参照。







の意味・定義・読み方は?自動車業界の新潮流を示す")
ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

