

科学技術振興機構(JST)は2020年3月25日までに、自動車における自動運転の経路計画プログラムから危険動作を自動検出する手法が開発されたと発表した。マツダの研究用モデルをもとに開発されたという。国立情報学研究所の研究チームとJSTのプロジェクトのもとで開発されたようだ。
自動運転では、周辺状況を踏まえて自動車が進む方向と速さを定める「経路計画」が必要となる。歩行者や自動車との衝突事故を防ぐだけではなく、交通ルールの遵守や運転の快適さなどの複数の観点を考慮し、最適な経路が定められる。
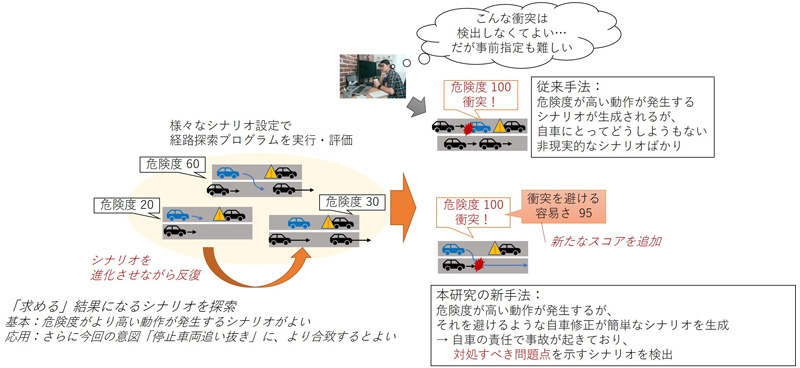
今回開発した手法においてはこの経路計画プログラムに関し、「さまざまなシナリオを生成しながら検査し、衝突事故が起きるシナリオを検出する自動テスト技術において、自車としては避けようもない衝突事故が起きるシナリオを検出してしまう課題を解決しました」と説明されている。
さらにはこの点について「経路計画プログラムで危険な動作を引き起こすシナリオのうち、自車の動作修正で衝突を回避可能なシナリオだけを自動検出できることを意味します。そのため、開発者が大まかなシナリオ状況を指定するだけで、問題点を検出できるようになります」と解説されている。
■次のステップは「対処のための知見を自動獲得」
今回開発した手法については、下記の概念図で解説されている。
報道発表では今後の研究について「検出した複数の事故全てに対し動作を改善する修正案の検出など、問題の発見だけでなく対処のための知見を自動獲得していくことに取り組んでいます」とされている。
今回の報道発表の内容については「自動運転の経路計画プログラムから危険動作を自動検出する手法を開発~細かい指定をせずに、現実的かつ危険な動作を発見する~」からも確認できる。経路計画プログラムに関わる研究者やエンジニアなどにとっては必読の内容だと言えよう。
【参考】関連記事としては「自動運転、読んでおきたい論文15選」も参照。
の意味・読み方は?自動車業界の新潮流を示す")




するなら?おすすめを口コミ情報から比較【2026年最新】")

の意味・読み方は?自動車業界の新潮流を示す")
ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

