

AI(人工知能)ロボット開発を手掛ける株式会社イクシス(本社:神奈川県川崎市/代表取締役:山崎文敬、狩野高志)と建設大手の「株式会社安藤・間」(本社:東京都港区/代表取締役社長:福富正人)=安藤ハザマ=は2019年6月27日までに、建築現場の施工自動化の基盤となる「自律走行ロボット」を共同開発したことを発表した。
このロボットはBMI(Building Information Modeling)と呼ばれる建物の3Dマップを活用して現在位置を高精度で認識することができる。建設現場での施工作業を自動化するにあたって必要になる技術だという。
現在の建設現場では労働者不足が予測されることから生産性の向上が課題となっている。さらに労働者確保のために、危険やつらさを伴う作業をなくすことなども求められているという。これらの課題を解決するため、自立走行ロボットなどを活用した現場作業の自動化技術開発が進められている。
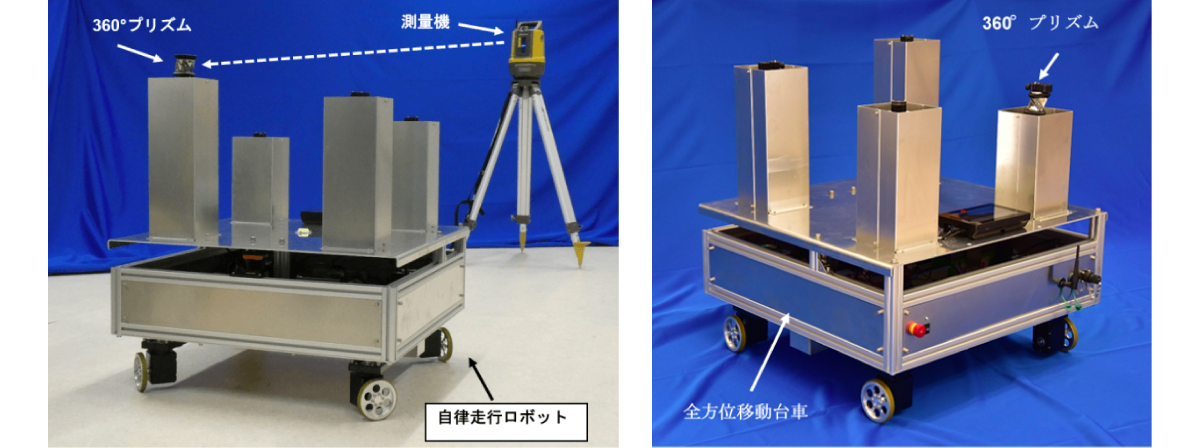
今回開発されたシステムは実際に現場を走行する「自立走行型ロボット」と位置測定と移動指示をおこなう「位置認識・移動制御システム」で構成されている。ロボットは重量60キロで幅770mm、奥行き770mm、高さ800mmほどのサイズで、毎秒0.5mの速度で走行し、全方位に移動することができる。
ロボットは無線LANで制御システムと連携し、タブレットやパソコンの画面から操作することができる。BMIデータはゲームエンジンを活用して特別な機材を用意しなくても快適な操作が可能だという。
このロボットは資材の搬入出や実際の作業アシストなど、建築現場での幅広い活用が見込まれている。様々な作業に活用することで、作業効率と生産性の向上が期待できる。両社は今後の展開として、ロボットの軽量を進めつつ施工の自動化につながる装置を開発して建設現場への展開を行う方針だという。
【参考】関連記事としては「振動ローラの自動運転システムを開発 中堅ゼネコンの安藤ハザマ」も参照。
生産性・安全性・品質をトリプル向上!振動ローラの自動運転システムを開発 中堅ゼネコンの安藤ハザマ https://t.co/kcN5tzwdU5 @jidountenlab #自動運転 #工事 #ゼネコン
— 自動運転ラボ (@jidountenlab) May 2, 2019
とは?いつ実現?")





タクシーのクーポンコード・キャンペーン一覧!初回無料、友達紹介、2回目以降も使える?")
の意味・読み方は?自動車業界の新潮流を示す")
ができる車種・機能一覧【トヨタ・ホンダ・日産・スバル】欧米車種も")

